

Принципова схема аналітичного універсального приладу
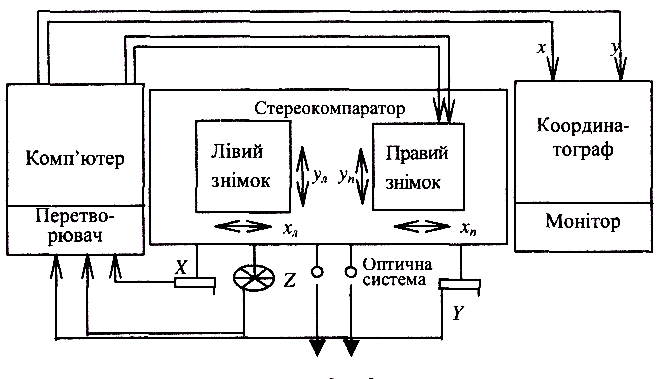
Прилад має такі головні складові: оптичну систему, механічну частину, обчислювально-управляючу частину з програмним забезпеченням.
Оптична система дає змогу стереоскопічно розглядати пару фотознімків з деяким збільшенням та виконувати візування марками на точки стереомоделі. У цій системі реалізується принцип Аббе - вимірювальна марка завжди знаходиться на оптичному промені, перпендикулярному до площини фотозображення. Оптична система є аналогічною до такої самої системи стереокомпаратора.
Механічна частина приладу дає можливість реалізувати високоточне переміщення кареток лівого та правого знімків в одній горизонтальній площині. В більшості випадків переміщення хл ул та хп уп є незалежними і реалізуються за допомогою диференційних кареток. Точність фіксації переміщень повинна бути +1 мкм. Механічне переміщення знімка (каретки) повинно бути перетворене в електричний сигнал. Для реалізації цієї функції використовують різні електродвигуни (обертово-імпульсні, лінійно-імпульсні або індуктивні), які з високою точністю перетворюють поворот ведучого гвинта каретки (лінійне переміщення) у відповідний електричний сигнал і навпаки. Якщо перші перетворювачі цього типу були технічно недосконалими (невисока надійність, обмеження по точності, шум під час роботи), то з середини 90-х років ці недоліки усунені.
Обчислювально-управляюча система реалізує дві головні функції. Перша з них - це строге аналітичне розв'язання таких фотограмметричних задач, як внутрішнє, взаємне, зовнішнє орієнтування знімків, розв'язання прямої фотограмметричної засічки, побудова мереж фототріангуляцїї тощо. Ці задачі покладаються на ПЕОМ, яка повинна "вміти" працювати в діалоговому режимі з оператором. Друга функція – це обчислення диференційних зміщень для лівого та правого знімків з тією метою, щоб оператор міг спостерігати стереомодель без поперечного паралаксу, та збір картографічної інформації зі знімків. Досить часто цей процес створення оригіналу топографічної карти називають стереоскладанням карти (плану). Очевидно, що для розв'язання цих задач необхідне відповідне програмне забезпечення.
В перших типах аналітичних приладів, коли ще технічні можливості комп'ютерів були мізерними (60-70-ті роки), використовувались мікрокомп'ютери, головна роль яких полягала в розв'язанні деяких фотограмметричних задач, обчисленні переміщень для лівого та правого знімків, контролю вимірювального процесу тощо. В наші дні, коли до стереокомпаратора підключається потужна ПЕОМ з високою швидкодією та величезним об'ємом оперативної та зовнішньої пам'яті, є можливість зібрати картографічну інформацію, візуалізувати її на екрані монітора, відредагувати, відобразити на координатографі та створити цифрову копію на магнітному носії чи лазерному диску.
Відомі такі аналітичні прилади:
автограф аналітичний АРС-4 фірми ОМІ (Італія);
автограф аналітичний PLANICOMP СІ00 фірми Opton (Німеччина);
- автограф аналітичний ANAPLOTНаціонального дослідницького центру (Канада);
автограф аналітичний TRASTERфірми Matra(Франція);
аналітичний прилад AVIOLYT фірми Wild (Швейцарія);
аналітичний прилад DSR1 та DSR2 фірми Kern (Швейцарія);
аналітичний прилад "СТЕРЕОАНАГРАФ" фірми "Геосистема" (Україна);
аналітичні прилади CD-2000,CD-3000фірми Leica(Швейцарія).
Зупинимось на довідковому матеріалі про вітчизняного виробника - фірму "Геосистема" (м. Вінниця). У1984 р. на базі проектно-конструкторського бюро Державного Центру “Природа" було створене виробниче об'єднання (ВО) "Аерогеоприлад". Тут у 1987 р. був виготовлений перший прилад "Стереоанаграф". У 1992 р. була завершена нова розробка "Стереоанаграф-4", яка успішно демонструвалась на виставці "Америка - Україна" в Лас-Вегасі.
В 1993 р. з ВО "Аерогеоприлад" виділилось як незалежне науково-виробниче підприємство "Геосистема", яке сьогодні займається виготовленням стереоанаграфів (сьогодні це модель Стереоанаграф-8) та цифрових фотограмметричних станцій.
Стереоанаграф включає в себе стереокомпаратор (точність - 3 мкм, збільшення - 7-21 крат, розмір вимірювальної марки - 25-100 мкм), комп'ютер типу IBM РС/486 і вище з операційною системою Intel/DOS, автоматизований координатограф (точність 0,2 мкм, багатоколірна рисувальна голівка) та пакет прикладних програм (управляюча, фотограмметричні задачі з орієнтування аеро- та космічних знімків, фототріангуляція, створення та редагування цифрових карт і планів).
Стереоанаграф має високі технічні характеристики, проте програмне забезпечення для розв'язання широкого кола інженерних задач потребує доопрацювання. Його очевидна перевага над закордонними аналогами - ціна у 1,5-2 рази нижча.
Саме цей фактор сприяв тому, що прилади "Геосистеми" працюють в США, Південній Кореї, Швеції, Іспанії, Італії, Єгипті, Китаї, Росії, Беларусі, Молдові та, звичайно ж, в Україні.
Програмне забезпечення для задач аналітичної фотограмметрії
Програмне забезпечення є органічною системою тієї технології, яка націлена на створення певної продукції та базується на використанні конкретного класу і типу фотограмметричних приладів.
З описаних приладів на найбільшу увагу заслуговують автоматизовані стереокомпаратори та аналітичні стереофотограмметричні прилади. Автоматизовані стереокомпаратори є приладами для збору інформації та автоматизованого запису її на носіях (перфострічках, магнітних стрічках, дискетах тощо).
Модернізовані автоматизовані стереокомпаратори дають змогу передавати виміряні величини безпосередньо в оперативну пам'ять ПЕОМ. Результати вимірів стереозображень можна використати для розв'язання таких задач:
побудова мереж аерофототріангуляції;
побудова мереж фототріангуляції з наземних фотознімків;
побудова ЦММ та ЦМР.
Програмне забезпечення аналітичних стереофотограмметричних приладів розв'язує перелічені задачі. Окрім того, на них реалізується ще одна важлива задача - побудова топографічних карт (планів) в заданій картографічній проекції (графічне та цифрове подання). Оскільки аналітичні прилади не мають істотних обмежень на параметри аерофотознімання, на вибір картографічної проекції, на вимоги до топографічних карт (умовних знаків), то ці прилади можна використати для розв'язання різноманітних інженерних задач.
Конкретне описання програмного забезпечення, переважно, становить 100 і більше сторінок, і носить суто індивідуальний характер. Це описання, як правило, має розділи:
призначення програмного комплексу;
умови виконання програми;
технологія виконання програми та дії оператора.
У першому розділі сформульовані задачі, які розв'язує програмний комплекс, та вказується тип кінцевої продукції, наприклад: каталог координат для фототріангуляції, оригінали карт (планів) для задачі стереоскладання або оновлення карт (планів).
У другому розділі дається перелік необхідних технічних засобів: тип ПЕОМ, наявність копроцесора, графічного адаптера, інтерфейса стереокомпаратор - ПЕОМ, друкарський пристрій, графопобудовувач тощо.
Тут подаються вимоги до стандартних програмних засобів, наприклад: тип операційної системи для ПЕОМ, комерційні спеціальні програмні продукти, драйвери для підтримки функціонування периферійних пристроїв тощо.
Третій розділ, як правило, є найбільш об'ємним. У ньому знаходиться інструкція з реалізації програми та рекомендовані для оператора дії, якщо необхідно оцінити якість фотограмметричних побудов або прийняти нове рішення, яке не можна було алгоритмізувати.
Щоб мати більш чітке уявлення про описання виконання програм (не потрібно плутати з алгоритмом задачі та самою програмою, написаною однією з відомих алгоритмічних мов), наведемо скорочений перелік основних пунктів, які подані в інструкції до стереоанаграфа (Україна).
Підготовка приладу до роботи: дається послідовність підключення приладу до електромережі, запуск ПЕОМ, виставлення стереокомпаратора та координатографа в початкове положення, закладказнімків в касети приладу.
Введення даних для блочної фототріангуляції: вводяться за допомогою клавіатури елементи внутрішнього орієнтування та еталонні віддалі аерофотокамери вздовж осей x та у, номери 'vаршрутів, які є одночасно іменами файлів, базис в масштабі знімка (це наближене значення необхідне для автоматичного підведення кареток до стандартних зон знімків). Окрім того, формується файл опорних та контрольнихточок для цього блока.
Порядок фотограмметричних вимірів: вони проводяться постереопарах. Для кожної стереопари марка автоматично підводиться допершої позначки, а оператор виконує точне візування на цю позначку; вподальшому для інших позначок процес аналогічний. Запис вимірянихвеличин здійснюється після натискування на педаль або на клавішу"Enter"клавіатури ПЕОМ. Вимірювання точок проводиться аналогічно.
Завершивши вимірювальний процес, оператор звертається допрограми аналітичної побудови блочної мережі фототріангуляції. Увипадку наявності неякісних вимірів проводиться діагностика процесу івидається необхідна інформація для прийняття оператором рішень.
Детальна інструкція з програмного забезпечення для побудови мереж фототріангуляції, редагування цифрових планів та інвентаризації земель становить приблизно 50 сторінок машинописного тексту.
В ході навчального процесу користувачі (в тому числі і студенти) вивчають ці інструкції, бо без них неможливо працювати на аналітичних фотограмметричних приладах.
Побудова цифрових та аналогових картографічних матеріалів
Однією з найважливіших функцій аналітичних стереофотограмметричних приладів є створення топографічних карт (планів) в цифровому та графічному поданні.
Послідовність виконання основних процесів є такою:
Підготовка та ввід в ПЕОМ елементів внутрішнього орієнтування та параметрів аерофотокамери.
Ввід в ПЕОМ каталогу координат опорних та контрольних точок.
Ввід в ПЕОМ масштабу та номенклатури топографічної карти;в деяких випадках вона отримується автоматично, але для цьогонеобхідна додаткова інформація.
Встановлення 1-ї (поточної) стереопари в приладі.
Виконання вимірювальних операцій: координатних позначок (для внутрішнього орієнтування), стандартних точок (для взаємного орієнтування), опорних точок (для геодезичного орієнтування моделі).
Набір вихідних даних для координатографа та автоматичногоорієнтування планшета.
Стереоскопічний збір картографічних даних з цієї стереопари(візування на контури та точки для відтворення рельєфу за допомогоюгоризонталей).
Редагування зібраних картографічних даних в межах усіхстереопар, поділ їх на листи топографічних карт з конкретною заданою(чи вичисленою) номенклатурою.
Нанесення опорних точок на планшет за координатами,автоматичне викреслювання рамки та нанесення координатної сітки.
10. Автоматичне викреслювання на планшеті елементів ситуації
та рельєфу.
11. Архівація цифрових картографічних даних.
Частина з вищенаведених пунктів виконується так само, як і для фототріангуляції. Тому розглянемо ті процеси, які раніше не описані.
Набір вихідних даних для координатографа та орієнтування планшета.
Оператор вводить в ПЕОМ значення масштабу плану (карти) та координати лівого нижнього кута планшета. Включається програма автоматичного орієнтування планшета. Після виконання цього процесу на екрані з'являється таблиця з похибками орієнтування в плані.
При автоматичній реєстрації даних про місцевість прийнято· крок, що дорівнює 1 мм. В натурі ця величина дорівнює 1 мм-М, де Μ - знаменник масштабу плану (карти). Залежно від "навантаженості" місцевості неправильно задана величина Μ або знизить якість формування ЦММ, або відбудеться збір непотрібних даних.
Програма стереоскопічного цифрового збору даних Програма призначена для формування даних про місцевість у вигляді послідовності точок з координатами Χ, Υ, Ζ (в заданій зовнішній "геодезичній" системі координат). Програма дає можливість виконувати кодування семантичної топографічної інформації з використанням класифікатора для масштабів 1:500 -1:5000.
При цифровому зборі можливі два режими: ручний з використанням педалі приладу, автоматичний з кроком 1 мм. Усі дані поділені на 10 класів та візуалізуються на екрані відповідним кольором:
населені пункти - чорний
промислові об'єкти - білий
комунікації - червоний
гідрографія - синій
елементи рельєфу - коричневий
рослинний покрив - яскраво-зелений
межі сільських угідь - зелений
інші елементи – яскраво голубий
горизонталі - коричневий
10)пікети - жовтий
Поділ на класи є умовним, і за необхідності оператор за допомогою текстового редактора може вносити необхідні зміни. Це не стосується класів 8-10, які є фіксованими.
Клас 8 (інші елементи) призначений для реєстрації точкових елементів (дерево, колодязь, світлофор, окремий камінь тощо). Клас 9 (горизонталі) призначений для реєстрації точок, що належать горизонталям. З'єднанняточок на екрані зображується ламаною лінією. Клас 10 (пікети) дає змогу фіксувати пікетні точки з підписами їх відміток.
Збір даних про об'єкт (з будь-якого класу) в ручному режимі полягає в послідовному візуванні за допомогою марки по стереомоделі на точки об'єкта (наприклад, на кут будинку). Після суміщень марки з точкою оператор натискає на педаль, і відбувається запис координат ΧΥΖ у відповідний файл. Оптичне положення марки на стереомоделі дублюється положенням білого хрестика на екрані монітора.
При автоматичній реєстрації оператор наводить марку на початкову точку об'єкта, фіксує це натиском відповідної клавіші (наприклад F2),далі неперервно "веде" марку по об'єкту, а фіксація координат Χ, Υ, Ζ відбувається автоматично з кроком 1 мм. Зрозуміло, що в такий спосіб можна зобразити рельєф у вигляді горизонталей. Для цього оператор "веде" марку так, щоб вона торкалась видимої стереоскопічно моделі об'єкта.
Семантичне кодування об'єкта
Це процес присвоєння об'єкту певної топографічної класифікації відповідно до прийнятого класифікатора об'єктів. Техніка вибору чітко описується в інструкції для оператора. Наприклад, об'єкту необхідно присвоїти семантичне (смислове) значення "Розробка". Оператор на таблиці з алфавітним вибором вибирає букву "Р". Далі оператор відшукує слово "Розробка", а вже в цьому класі - необхідний йому підклас, наприклад, "Розробка торфу". Після вибору типу об'єкта автоматично з бібліотеки умовних знаків вибирається необхідний знак, яким можна позначити цей об'єкт.
Редагування цифрової інформації
Програма редагування призначена для формування змісту карти в межах планшета з підписами, умовними знаками, для внесення необхідних змін та доповнень, а також для оперативного отримання інформації про будь-який об'єкт. Графічний зміст планшета можна видати на графопобудовувач засобами AutoCADабо за допомогою іншого графічного пакета.
Програма має такі функції:
створення нової ділянки як частини планшета;
перезаписування стереопар цього планшета в новостворену ділянку;
- формування цифрової інформації строго в межах планшета;викидається все, що не належить цьому планшету;
- графічне інтерактивне редагування графіки, семантики та тексту;
автоматичне зведення горизонталей з різних стереопар;
генералізація картографічної інформації при переході на дрібніший масштаб;
видавання інформації для роботи графопобудовувача;
формування інформації у форматі DXFз автоматичним пускомсистеми AutoCAD;
усунення стереопари з будь-якої ділянки;
усунення ділянки повністю.
Таким чином, виконання різноманітних функцій дає змогу отримувати топографічні плани та карти, зафіксувати їх у графічній або цифровій формі.