

Глава 2. Сведения об управляемости 2.1. Устойчивость на курсе и поворотливость 17
2.2.Движение судна под влиянием переложенного руля 22
2.3.Влияние параметров корпуса и руля на управляемость 27
2.4.Влияние боковых сил, обусловленных работой гребного винта 30
2.S. Управляемость одновинтового судна на заднем ходу 36
2.6.Управление многовинтовым судном 37
Глава 3. Инерционно-тормозные характеристики судна 3.1. Общие сведения об инерционно-тормозных свойствах судна 38
3.2.Движение при изменениях режиме работы двигателя на переднем ходу 44
3.3. Торможение судна 32
(з!9> 36
(1+1/ГГТ)(,. у ,/7П) 37
7- _о,5, 40
4.2.Ветровой дрейф 41
,; = 2(«° -45° + 1807ц„). (4.24) 47
4.3.Маневрирование в условиях ветра 49
Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах 55
5.2.Определение маневренных элементов из натурных испытаний 55
5.3.Расчетное и экспериментально-расчетное определение элементов поворотливости 62
г. 72
6.1.Средства активного управлении (САУ) 73
6.3.Использование якорей при маневрировании 83
л 94
JjL Р т 117
7.4.Управление судами при буксировке 136
Глава 8. Снятие судна с мели 8.1. Причины посадки судов на мель 141
8.2.Действия экипаже судна, севшего на мель 142
/п,(1 !-*.?,) 150
Q = ^cp F, (9.14) 159
ч 182
V -$г+‘ • 212
лгг 250
t©^'=0^>^00==£Э— 291
Рис. 10.13. Возникновение поперечных сил и моментов при встречном движении двух судов
судна / проходит траверз миделя судна 2, картина вновь меняется, поскольку взаимодействуют зоны повышенного давления в кормовой оконечности судна 1с зоной пониженного давления в средней части судна2(рис. 10.13,в).В этот момент на суда действуют силы присасывания Кг>0, создающие моменты, которые стремятся сблизить кормовые оконечности. При выходе кормы судна1на траверз кормы судиа2будут взаимодействовать зоны повышенного давления кормовых оконечностей. В результате на кормовые оконечности судов будут действовать расталкивающие силы Уг<0, а гидродинамические моменты будут стремиться отбросить кормовые оконечности друг от друга.
Таким образом, в процессе встреч и обгонов судов характер действия гидродинамических усилий непрерывно изменяется, что влечет за собой соответствующие трудности в управлении судами. Необходимо подчеркнуть, что рассмотренная качественная картина гидродинамического взаимодействия судов является сугубо схематичной. В реальных условиях взаимодействие судов может иметь еще более сложный характер, что объясняется взаимодействием волновых систем расходящихся судов, наличием углов дрейфа, влиянием ограничений фарватера по глубине и ширине и т. д. В последнее десятилетие вопрос о гидродинамическом взаимодействии судов изучен достаточно полно для скоростей хода, соответствующих числам Фруда, при которых волнообразование, ^создаваемое судовым корпусом, незначительно (Fr<0,25).
Поэтому в целях обеспечения безопасности транспортных судов при расхождении рекомендуется снижать скорость хода.
Для расчета конкретных значений гидродинамических сил Yrи моментовМгможно воспользоваться выражениями:
рКа
(0,5L)*, A*P-CW|lpVM0,5(.)»,
(10.22)
(10.23)
где L—длина судна, м;
Сик— гидродинамический коэффициент поперечной силы;
С„,н— гидродинамический коэффициент момента поперечной силы.
где
du
Ц
— осадка и длина меньшего судна, м; dj,
Lj
— осадка и длина другого судна, м;
km
— коэффициент влияния мелководья на
величины С„к
нС«*к-
1
— относительное продольное расстояние
между миделями судов, причем 2«2//£;
fv
и fm
—- волновые функции, учитывающие
влияние волнообразования на значения
коэффициентов C9ti
и Сти*
(10.25)
Значения
функции е"у*
и е"т*
зависят от относительного тра- верзного
расстояния между судами 6и
и от относительной длины L\.
В
свою очередь:
![]()
Коэффициент kMвлияния мелкоподья жет быть найден по графику (рис. 10.14), Волновые функцииfyиfmучитыв влияние волнообразования и зависят от па метров движенияm(m=m/0,51г— относите! ное продольное смещение миделевых сече судов в долях полудлины большего судиH/dcpи числаFr.
Рис.
10.14. График зависимости км
от H/dcp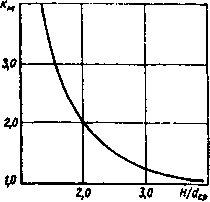
Результаты теоретических исследований, экспериментов иа мо лях и натурных испытаний судов позволяют судить о следующем.
Случай обгона одного судна другим является более опасным, ч встречное расхождение при прочих равных условиях, так как гид динамические силы и моменты, возникающие на корпусе судна при гоне, значительно больше. При практически равных расстояниях ме ду бортам и судов при обгоне и встречном расхождении на одних тех же скоростях максимальные значения коэффициентов С„иСщ( следовательно, сами силы и моменты) при обгоне в 2—7 раз больш
В случае обгона максимальные значения коэффициентов Су Стположительны, и воздействие гидродинамических усилий иа су наиболее опасно, так.как максимальная поперечная сила стремит сблизить корпусы судов, а момент разворачивает носовую оконе ность обгоняющего судна в сторону обгоняемого судна.
При встречном расхождении поперечные силы в большинстве сл' чаев оказываются отрицательными (т. е. отталкивают одно судно другого), а максимальный по абсолютной величине момент, как по вило, отрицателен, т. е. наблюдается отталкивание одного судна а другого.
Натурные испытания показали, что в случае обгона, особенно н малых глубинах, суда неоднократно наваливались друг на друга, iг смотря на действия судоводителей даже при довольно значительны траверзных расстояниях между судами (при траверзных расстояния от 2 до 5 ширин меньшего судна).
Влияние мелководья на увеличение гидродинамического момент показано на рис. 10.14.
При встречных расхождениях на различных глубинах, с разным скоростями движения и при траверзных расстояниях от 0,75 до одно ширины меньшего судна не наблюдались случаи, когда гидродинами ческие усилия создавали аварийную ситуацию. Практически в процес се встречных расхождений силы и моменты не препятствуют безопас ной проводке судов в отличие от случаев обгона.
В подавляющем большинстве случаев момент гидродинамически, сил, возникающих при обгоне одного судне другим., достигает макси мального значения, когда мидель обгоняющего судна находится при мерно на траверзе кормы обгоняемого. Пои этом момент стремитс развернуть обгоняющее судно в сторону обгоняемого, а момент, дей ствуюший на обгоняемое судно, стремится развернуть его кормову оконечность в сторону обгоняющего.
При встречном расхождении до того, как мидели судов выйдут па трпверз, действующий момент стремится отвернуть носовые оконечности друг от друга. В дальнейшем наблюдается отбрасывание кормо- иых оконечностей судов. В некоторых случаях наблюдается взаимное притяжение кормовых оконечностей.
При движении на мелководье наблюдается значительный рост гидродинамических сил и моментов с увеличением скорости при относительном расстоянии тмежду центрами тяжести судов от 0.6 до 1.2. В положении от 0,7 до 1,0 (наиболее опасном по значениям дейст муюших моментов) наблюдается резкое возрастание коэффициентов С,, иС,„с повышением скорости.
Наиболее опасным является случай обгона па скоростях, близких к критическим на мелководьеV^OJl gH. При обгоне на глубокой воде и на мелководье силы и моменты практически не влияют на движение судов, когда расстояние между бортами составляет более 6 ширин меньшего судна.
При встречном расхождении влиянием гидродинамических усилий на корпусы судов как на глубокой воде, так и на мелководье, можно пренебрегать, когда расстояние между бортами составляет более 2,5 ширии меньшего судна.
В период натурных испытаний было установлено, что при обгоне одного судна другим маневрирование рулем должно осуществляться очень осторожно. Наблюдались случаи, когда при зарыскивании обгоняющего судна в сторону обгоняемого предельная перекладка рулевых органов на противоположный борт не давала положительного эффекта, вследствие того, что при полной перекладке руля на борт судно получало значительное обратное смещение, из-за чего воздействие дополнительных гидродинамических усилий на корпус возрастало.
При обгоне маневрирование рулем на обгоняющем судне следует начинать тогда, когда его носовая конечность еще не поравнялась с кормой обгоняемого судна. В положении, когда относительное расстояние между центрами судов 2, необходимо начинать плавную перекладку руля на внешний борт, увеличивая угол перекладки руля так, чтобы наибольший момент рулевых сил действовал на обгоняющее судно при т=0,8—1,0, т. е. когда его середина будет находиться на траверзе кормы обгоняемого судна.
При встречном расхождении двух судов ие требуется значительных перекладок рулей. Например, для однотипных судов при расстоянии, равном примерно одной ширине, требовалась перекладка рулей не более 5—10°. Движение судна в обгон с заранее приданным углом дрейфа позволяет избежать зарыскивания обгоняющего судна в сторону обгоняемого, но если суда движутся в обгон на малых расстояниях между бортами, наличие угла дрейфа на обгоняющем, судне не исключает сил взаимного притяжения. д
Натурные наблюдения показали, что при движении в обгон на мелководье происходит резкое увеличение просадки судов. При движении на мелководье при траверзных расстояниях, равных от 1 до 7 ширин меньшего судна, максимальная просадка совместно движущихся судов может увеличиваться на 20—50 % по сравнению с просадкой одиночного судна. „При встречном расхождении судов на сравнительно больших скоростях наблюдается изменение их просадки (особенно для меньшего судна, когда оно попадает в систему волны большего судна). Максимальное изменение просадки при встречном расхождении мень-
ше чем при обгоне- Наибольшего значения в случаяхобгона просадка обгоняющего су^наДостигает в положениит=1-1.2.
Пои заметИомразличии в размерах судов наибольшие гидродинамические уси^ия отвзаимодействия при обгоне будут действовать на меньшее по размерам судно. Наихудшим является случай, когда по размерам (fl° Длине)онобудет примерно в 3 раза меньше другого Поэтому рек<>мендуется соответствующее маневрирование производить на мены^емсудне.
ГидродинаМическиеусилия от взаимодействия судов резко увеличиваются с рос*™ скорости. Поэтому при встречах и обгонах на ограниченных глубинах скорость должна отвечать условиюV’s^O.oVцН,
а на глубокой #оде^^0,2V gL.
10 6 Маневров** лолоса движении с учетом внешних факторов
Ширина логосы безопасного движения Вс>,Ав стесненных условиях плавания(вканалах, по фарватерам ограниченной ширины и
т. д.) принима^тсяРавн°й*
Яб.д. Я, (10.26)
и полоса движения, м;
ГД вГзапаеВРравный ширине судна, м
Маневрова** полоса движения в общем случае может быть определена из следУюшеговыражения:
/-u»in (а4 p4 v) Н- ) всо* (a + P+v)+ У t sin<p, (10.27)
гnc / - длина цИ'',индРическ?й вставки судна, м;
Д а — уго^ ветРового Ч*»*.
В - угол сноса от течения, град;
?-уидр^Фа;;-*“и.град.
У - скорость0** •
Ф—угол рЫс* Р А*
/-период рыскания судна, с.
Значения Угловветрового дрейфа можно выбрать для глубокой воды (считая глубокой водой, когда глубина превышает три осадки
судна) из табл
Веаичина Угла вегРОвого дрейфа а, выбранная из табл. 10.8, при глубинах \*еМьШе тРех осадоксудна корректируется коэффициентом
^По^ЛотсУ'Гствнисведений об отношении надводной и подводной паощадей парУСН0СТИД°пУстимо величинуSH/S„ определять по приближенной формУле-
5и/5п»1.2 HJd% (10.28)
где Н —• высота Наводного борта, м
Нетоудно видеть, что проводка судов при предельной осадке требует меньшей маневровой полосы, так как углы ветрового дрейфаuorvTбыть в несколько раз меньше, чем на глубокой воде.
Значения Угловсноса от течения 0 можно выбрать из табл. 10.10. Пои забРоВОЧнт1 глУбине каналаH3<.dнормативные документырекомендуют скорость теченияvrкорректировать коэффициентом
,у
игг учитывающим экранирующее влияние
стенок прорези»
те” для вход3 в табл* выбирается новая скорость течения, рав
ная V\~krVT'
\
I
а б л и ц a
10.8. Значения углов ветрового дрейфа а
в зависимости от соотношения площадей
парусности надводного и подводного
бортов SnfS»
и
курсового
угла истинного ветра qu
(С/
—
скорость истинного ветра,
V
— скорость судна)
UfV
«и*
град
5н
/5н
0.2
0.4
0.6
0.8
|
1
«.о
2.0
3.0
|
4,0
1
0,5
0,5
0.5
0,5
0,5
1.0
1.0
1,5
2
0,5
1.0
1,0
1.0
1.5
2,0
2,5
3,0
3
30
1.0
1.5
1.5
2,0
2,0
3,0
4,0
4,5
4
1.0
1.5
2,0
2,5
3,0
4,0
5,0
6,0
5
1.5
2,0
2,5
3,0
3,5
5,5
7,7
8,0
1
0,5
1.0
1.0
1.0
1.0
1,5
2,0
2,5
2
1,0
1.5
2,0
2,5
3,5
4,5
5,0
5,5
3
60
1,5
2,5
3,0
3,5
4,0
5,5
6,5
8,0
4
2,0
3,0
4,0
4,5
5,0
7,5
9,0
10.5
5
3.0
4,0
5,0
5,5
6.5
9,5
11
,5
13,5
1
0,5
1.0
1,0
1.5
1.5
2.0
2,5
3,0
2
1.5
2,0
2,0
2,5
3.0
4,0
5,0
5,5
3
90
2,0
2.5
3,5
4,0
4.5
6,0
7,5
8.5
4
2,5
3,5
4,5
5,0
5.5
8,0
10,0
11,5
5
3,0
4,5
5,5
6,5
7.0
10,0
12,0
14,0
1
0,5
1.0
1.0
1.0
1
.0
1,5
2,0
2,5
2
1,0
1.5
2,0
2.0
2.5
3,5
4,0
4,5
3
120
1.5
2.0
2,5
3,0
3.5
5,0
5,5
6,5
4
2,0
3,0
3,5
4.0
4,5
6,5
7,5
9,0
5
2,5
3.5
4,5
5,0
5.5
8.0
9,5
10,5
1
0,5
0.5
0,5
0,5
1.0
1.0
1
,0
1.0
2
0,5
1.0
1,0
1.0
1.5
2.0
2,5
2,5
4
150
1,0
1.0
1.5
1
,5
2.0
2,5
3,0
3.6
4
1.0
1.5
2,0
2,0
2.5
3.5
4,0
4,5
5
1.5
2,0
2,5
2,5
3.0
4.0
5,0
5,5
Таблица
10.9. Значения к
в
в зависимости от отношения Hfd
Hid
3,0
2,6
2,2
1,8
1.4
1,3
*•
1
|.
0,83
0,71
0,59
0,48
0.33
0,29
Таблица 10.10. Значения углов сноса р в зависимости от соотношения скоростей течения и судна v,JV и курсового угла qr
|
|
Vv | |||||||||
|
|
0,03 |
0,05 | |
| 0.07 |
0,10 |
0,13 |
0.17 |
0,20 |
0,30 |
0,40 | |
| 0,50 |
|
30 |
1.0 |
1.5 |
2,0 |
3,0 |
4,0 |
5,5 |
7,0 |
11.5 |
17,0 |
24,0 |
|
60 |
1.5 |
2,5 |
3,5 |
5,0 |
7,0 |
9,0 |
11,0 |
17.0 |
23,5 |
30,0 |
|
90 |
1,5 |
3,0 |
4,0 |
5,5 |
7,5 |
9,5 |
11,5 |
16,5 |
22,0 |
26,5 |
|
120 |
1.5 |
2,5 |
3.5 |
4.5 |
6,0 |
7,5 |
9,0 |
12,5 |
16,0 |
19,0 |
|
150 |
1.0 |
1.5 |
2,0 |
2,5 |
3,5 |
4,0 |
5,0 |
7,0 |
8,5 |
10,0 |
Строго говоря, в этом случае, особенно при большей разнице между осадкой судна и забровочной глубиной, влияние течения следует рассматривать не как снос, а как дрейф от течения по аналогии с ветровым дрейфом судна. Как показали натурные наблюдения при проводке судов по Ленинградскому морскому каналу, такой вывод не лишен основания. В этом случае значения углов дрейфа от влияния течения могут быть значительно меньше полученных из табл. 10.11 с учетом поправочного коэффициента kT.
Угол волнового дрейфа судна зависит от соотношения скоростей волного дрейфа vB и скорости судна V и может быть определен из выражения;
у — arctg . (10.29)
Следует отметить, что волновые углы дрейфа могут иметь большие значения, соизмеримые с углами ветрового дрейфа и сноса от течения и значительно влиять на маневровую полосу движения. Так, например, для открытой части Вентспилского морского канала, как показывает расчет, выполненный для теплохода «Маршал Буденный», длиной около 260 м при высоте волны 2 м и скорости судна 4 уз увеличение маневровой полосы из-за волнового дрейфа при курсовом угле 90° составляет 33 м.
При проводке судов по створам вместо величины V/ sin ф в выражение (10.27) следует подставить чувствительность створа р.
Управление судном в каналах и реках
При движении судна по каналу увеличиваются волнообразование и сопротивление воды, скорость движения уменьшается. Кроме того, для сохранности ложа канала местными правилами плавания предусмотрено ограничение скорости движения судов.
При смешении судна с оси канала и движении вблизи его бровки возникают силы отталкивания от берега, вследствие чего нос судна стремится развернуться в сторону оси канала, а корма «присасывается» к берегу. Для воспрепятствования такого «присасывания» и обеспечения прямолинейного движения судна вдоль откоса канала руль следует положить в сторону бровки. При этом, если скорость движения вдоль откоса канала уменьшается, то судно уходит в сторону берега, а при увеличении скорости — в сторону оси канала. Необходимо также учитывать возможность ухода носовой оконечности судна от мели.
При движении мимо расширенных участков канала вследствие асимметрии обтекания корпуса потоком воды у судна увеличивается рыскливость. При подходе к такому участку оно стремится развернуться в сторону расширения, после прохода — в противоположную сторону.
На прямолинейном участке канала судно должно следовать по его оси. Уклонение от оси канала допустимо лишь при расхождении судов. Встречные суда должны первоначально уклониться таким образом, чтобы их левые борта находились примерно на оси канала. Когда расстояние между ними станет равным примерно трем длинам большего из судов, они должны постепенно уклоняться на необходимое траверзное расстояние, обеспечивающее безопасное расхождение.
Для обеспечения безопасного движения при обгоне в канале боль* шое значение имеет скорость движения при работе главных двигате- лей на минимально устойчивом режиме. Для обгона необходимо вы* бирать прямолинейные участки канала. Траверзное расстояние между судами при расхождении должно быть равным расстоянию между от косом канала и судном. В этом случае обтекание корпусов обоих судов будет более равномерным, и явление присасывания будет незначи- тельным.
При расхождении двухвинтового судна желательно работать одним винтом, расположенным к осевой линии канала. В этом случае уменьшается отсос воды со стороны берега, к которому подошло судно, что приводит к уменьшению ухода его от откоса.
Для улучшения управляемости судов в момент расхождения частота вращения движителей на некоторый момент может быть увеличена. Это не вызовет резкого увеличения скорости.^,
При встречах и обгонах судов в каналах и реках просадка увели чивается более интенсивно, чем на глубокой воде и это необходимо учитывать судоводителю.
Подходя к глубоким выемкам и поворотам канала, где судовой ход не просматривается, необходимо заранее уменьшать скорость, следовать с осторожностью и подавать соответствующий звуковой сигнал, предписанный правилом 34(в) МППСС-72, а также по возможности оповещать другие суда по УКВ-связи о своем подходе к криволинейному участку. Судно необходимо вести ближе к выпуклому берегу.
При сильном ветре безопасность расхождения в некоторых случаях может быть обеспечена только при остановке одного из встречающихся судов и смещении его с оси канала.
Проходя мимо стоящих у берега судов, необходимо заблаговременно снижать скорость движения до минимальной.
При плавании по реке большое значение при управлении судном будет иметь течение.
Контрольные вопросы. 1. Как можно охарактеризовать понятие «узкость» и «мол ководье» с точки зрения управления судном? 2. Что такое критическая скорость при плавании в стесненных условиях? 3. Как влияет мелководье и стесненность судового хода на скорость, управляемость и инерционно-тормозные характеристики судна?
В каких случаях просадка носом больше просадки кормой и от чего это зависит?
Как проявляется гидродинамическое взаимодействие между судами при встречах и обгонах?
X