

Бонус от Юли Захаровой Гос экзамены с ответами
.pdf31
Основными особенностями организации современных микропроцессоров и микро-ЭВМ является:
А) Модульная структура, в которой модули являются функционально законченными устройствами Б) Магистральная организация связей между модулями, при которой общие шины используются разными модулями В) Микропрограммное управление Г) Байтовая адресация памяти и побайтовая обработка данных
Д) Использование внутренних сверхоперативных регистров.
В структуре можно выделить три основные части: центральный процессор, блок управления и постоянная память микропрограмм. Центральный процессор содержит АЛУ, сверхоперативную память в виде программно доступных общих регистров и функциональные регистры – командный, индексный, адресный, указатель стека и программный счетчик. АЛУ состоит из двоичного сумматора, сдвигающего регистра, двух регистров операндов и регистра результата. Схемы АЛУ выполняют команды сложения, вычитания, логическое И, ИЛИ, сложение по модулю 2 и сдвигов. Более сложные операции реализуются программно. Блок микропрограммного управления содержит дешифратор кода операции, схему формирования функций перехода к следующему адресу в микропрограмме и регистр адреса микрокоманды. Система прерывания в микропроцессорах достаточно проста и предназначена только для восприятия прерываний от внешних источников. Микропроцессоры имеют упрощенные схемы управления ПУ. В значительной степени управление этими устройствами реализуется посредством микропрограммного управления. Блок постоянной памяти микропрограмм, реализующих команды микропроцессора, обычно выполняется в виде отдельной БИС. В микропроцессорах используют косвенную, непосредственную, индексную адресации основной оперативной памяти и прямую адресацию общих регистров. Сверхоперативная память на общих регистрах, позволяет сократить количество обращений к внешней памяти и уменьшить необходимое количество выводов корпуса за счет сокращения формата команды. Из-за ограниченного числа выводов корпуса БИС не удается реализовать интерфейс микропроцессора с высокой пропускной способностью. Поэтому микропроцессоры имеют так называемый общий интерфейс, обслуживающий как внешнюю оперативную память, так и ПУ. Если не удается выделить для интерфейса достаточное количество выводов, применяют мультиплексирование шин (использование шин для разных целей на основе разделения времени). Для обеспечения совместной работы микропроцессора и внешнего оборудования шины интерфейса снабжаются буферными схемами, в которых используются электронные схемы с тремя состояниями и спец. линии управления выдачи данных.
В любом устройстве обработки цифровой информации можно выделить операционный и управляющий блоки. Такой подход упрощает проектирование, а также облегчает понимание процесса функционирования вычислительного устройства.
Операционный блок состоит из регистров, сумматоров и других узлов, производящих прием из внешней среды и хранение кодов, их преобразование и выдачу результатов работы во внешнюю среду, а также выдачу в управляющий блок и внешнюю среду оповещающих сигналов.
Процесс функционирования во времени устройства обработки состоит из последовательности тактовых интервалов, в которых операционный блок производит элементарные преобразования кодов (передачу кода из одного регистра в другой, взятие обратного кода, сдвиг и т.д.).
Элементарная функциональная операция, выполняемая за один тактовый интервал и приводимая в действие одним управляющим сигналом называется микрооперацией.
Управляющий блок вырабатывает распределенную во времени последовательность управляющих сигналов, порождающих в операционном блоке нужную последовательность микроопераций.
Последовательность управляющих сигналов (микрокоманд) определяется кодом операции, поступающим извне, состоянием операндов и промежуточными результатами преобразований.
Существует два основных типа управляющих автоматов: 1) Управляющий автомат с жесткой логикой.
Для каждой операции, задаваемой кодом операции команды, строится набор комбинационных схем, которые в нужных тактах возбуждают соответствующие управляющие сигналы.
2) Управляющий автомат с хранимой в памяти логикой.
Каждой выполняемой в операционном устройстве операции ставится в соответствие совокупность хранимых в памяти слов - микрокоманд, содержащих информацию о микрооперациях, подлежащих выполнению в течение одного машинного такта, и указание, какая микрокоманда должна выполняться следующей.
Последовательность микрокоманд, обеспечивающая32выполнение некоторой операции (например, умножения), называется микропрограммой данной операции.
3. -Математические модели объектов и систем управления
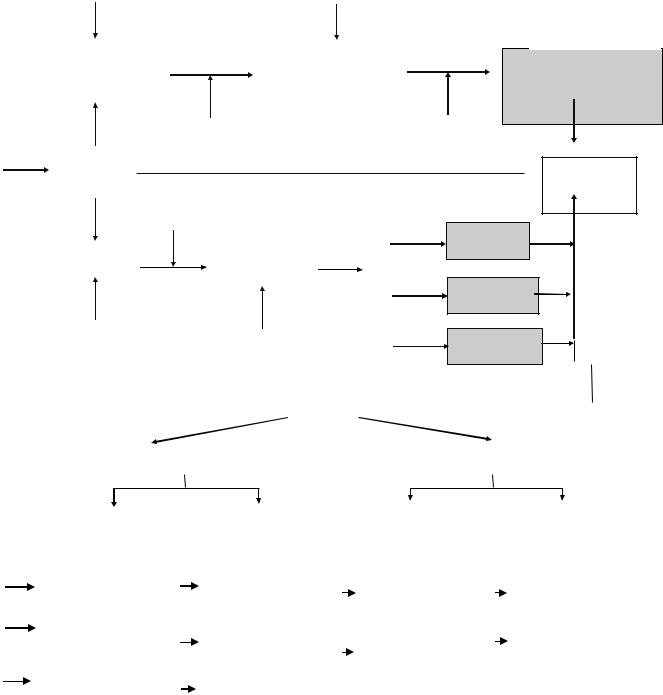
МАТЕМАТИЧЕСКИЕ МОДЕЛИ ОБЪЕКТОВ И СИСТЕМ могут быть получены двумя путями: путем моделирования (верхняя часть схемы, приведенной ниже) и путем идентификации (нижняя часть схемы).
Под идентификацией объекта понимается определение на основе записей его входных и выходных сигналов модели(внутри определенного класса моделей) , эквивалентной объекту при определенных тестовых воздействиях.
При этом в соответствии с типом объекта (серым или черным ящиком) встает задача идентификации в “узком смысле” ,когда структура модели известна и нужно уточнить значения коэффициентов (в иностранной литературе эта задача известна как задача оценивания) или в широком смысле, когда нужно определить как структуру, так и коэффициенты математической модели (задача
структурной и параметрической идентификации).
Для построения модели объекта используется вся имеющаяся информация об объекте. Схема использования информации в процессе идентификации представлена на рис. 1.2.
Процесс идентификации зависит от сложности объекта управления и является сложным и многоэтапным.
. Дадим классификацию используемых при идентификации и моделировании линейных моделей в виде рис. 3.1. Помимо приведенных в таблице, при идентификации используется также модель в пространстве состояний как непрерывная, так и дискретная.
|
|
|
Ошибки |
|
|
|
Ошибки |
|
|
|
|
|||
|
|
|
моделирования |
|
линеаризации |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Дифференциальные уравнения |
|
|
Дифференциальные |
|
|
|
|
|||||||
в частных производных |
|
|
уравнения в частных |
|
|
|
|
|||||||
уравнения в частных |
|
|
производных |
|
|
|
|
|||||||
(нелинейные) |
|
|
|
|
|
|
|
|
||||||
|
|
производных |
|
|
|
(линейные). |
|
|
|
|
||||
|
|
(нелинейные) |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
ЛИНЕАРИЗАЦИЯ |
|
|
АГРЕГИРОВАНИЕ |
||||||||
|
|
|
|
|
АПРИОРНЫЕ ЗНАНИЯ |
|
|
|
|
|||||
|
|
ПРОЦЕСС |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АПОСТЕРИОРНЫЕ ЗНАНИЯ |
|
|
|
|
|||||
Шум |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
процесса |
ОБРАБОТКА ДАННЫХ |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
С |
|
||
|
Измеренные |
|
|
|
|
|
|
|
|
Т |
|
|||
|
|
|
|
Дискретизация |
|
|
||||||||
|
|
данные |
|
|
|
|
|
Р |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
У |
|
||
|
|
|
|
|
|
|
|
|
|
|
К |
|
||
|
|
Шум измерений |
Шум дискретизации |
|
Т |
|
||||||||
|
|
|
У |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Р |
|
||
|
|
|
|
|
|
|
|
|
|
|
А |
|
||
|
|
|
|
|
|
Рис. 1.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
МОДЕЛИ |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ошибки агрегирования
Обыкновенные
дифференциальные уравнения.
МОДЕЛЬ
Оценка
порядка
Оценка
параметров
Оценка
состояний
|
|
|
Непрерывные |
|
|
|
|
|
|
|
Дискретные |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Параметрические |
|
|
|
Непараметрические |
|
|
|
|
Параметрические |
|
|
|
|
|
Непараметрические |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Передаточные |
|
|
|
|
Весовые функции |
|
|
|
|
Разностные |
|
|
|
|
|
|
|
|
||||||
|
функции |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
уравнения |
|
|
|
Весовые |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
функции |
|
|||
|
Дифференциальные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
уравнения |
|
|
|
Переходные функции |
|
|
|
|
Дискретные |
|
|
|
|
|
|
|
||||||||
|
|
Частотные |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
передаточные |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Разложения по |
|
|
|
|
|
|
|
|
|
|
функции |
|
|
|
характеристики |
|
||||||||
|
ортогональным |
|
|
|
|
Частотные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
функциям |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
характеристики |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
33
Рис.3.1
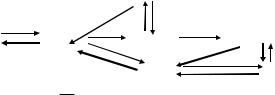
Непрерывные модели и их взаимосвязь
Все непрерывные модели, представленные на рис.3.1, взаимосвязаны, т.е. от одной модели всегда можно перейти к другой с той или иной степенью сложности. Взаимосвязь непрерывных моделей можно представить в виде рис. 3.2.
L( ), ( )
|
L -1 |
p=j |
|
|
диф. уравнения |
W( p) |
|
W( j ) |
P( ),Q( ) |
|
L |
? |
|
|
|
L -1 |
|
w( t) |
h( t) |
d
dt
Рис. 3.2
На рис.3.1 и рис.3.2 L ,L --1- прямое и обратное преобразование Лапласа;
W(p) - модель в виде непрерывной передаточной функции; W(j ) - комплексного коэффициента усиления; P( ),Q( ),L( ), ( ) - вещественной частотной, мнимой частотной , логарифмической амплитудной частотной и фазо-частотной характеристик соответственно; w(t),h(t) - импульсной переходной (весовой) и переходной функции.
Все переходы очевидны, за исключением перехода от w(t) к W(p), когда весовая функция задана не аналитически, а графически. Однако такие способы перехода также существуют, среди них такие как преобразование Фурье, дающее W(j ), разложение w(t) по базисным функциям (экспонентам, функциям Лагерра и др.)
Хотя методы идентификации, использующие непрерывные модели существуют и хорошо разработаны, непрерывные модели обладают рядом недостатков, среди которых существенными являются следующие:
-трудности представления непрерывных моделей на ЭВМ ( такое представление приводит либо к численному решению систем дифференциальных уравнений, либо - к представлению схемы через интеграторы и моделированию интеграторов; и то, и другое ведет к большим затратам машинного времени);
-невозможность точного представления непрерывных систем на ЭВМ;
-несоответствие непрерывных моделей дискретным , полученным после квантования реализациям входных и выходных сигналов;
-трудности численного перехода от одной модели к другой.
Поэтому перейдем к рассмотрению дискретных моделей, используемых при моделировании и идентификации.
3. -Человек как звено АСОИУ
В зависимости от реализуемого уровня автоматизации и выполняемых функций различают несколько типов систем автоматизации. Быстродействия человека в большом числе случаев не хватает для управления быстро протекающими процессами. Кроме того, он
постепенно устает, теряет внимание... САУ свободны от этих недостатков. Таким образом, одна из целей автоматизации - заменить человека там, где его возможностей не хватает для обеспечения нужного качества управления. Автоматика освобождает человека от тяжелого, монотонного или рутинного труда, заменяет его во вредных и опасных для здоровья условиях окружающей среды.
Теория и практика создания САУ способны предложить технические решения как в "нештатных" ситуациях, так и при недостатке знаний об объекте. Это различные способы диагностики и резервирования систем, алгоритмы адаптации, самонастройки и самообучения. Можно многое, но нужно ли делать это? Здесь на первый план выходят экономические аспекты автоматизации.
С определенной точки зрения САУ являются простейшими по своей организации системами, так как алгоритм управления, хранящийся в управляющем устройстве, должен полностью соответствовать поведению системы как правило, замкнутой обратными связями) во всевозможных ситуациях, включая выход из строя отдельных элементов системы. Для этого необходимо знать свойства объекта и не только знать, но и уметь измерять их, т.е. оценивать количественно, в процессе функционирования системы. Это не всегда удается по ряду причин: сложность объекта управления, тяжелые условия для работы датчиков обратных связей, непостоянство свойств объекта правления.... Представьте робота за рулем автомобиля.
Структура АСУ автономным объектом по сравнению с САУ содержит дополнительное звено - оператора. Участие человека в управлении объясняется недетерминированностью или недостаточной изученностью некоторых этапов управления, чрезмерно сложностью их полной автоматизации или технической сложностью получения полного набора требуемых для управления входных сигналов непосредственно с объекта. Недостаток информации оператор компенсирует не толь с помощью своих органов чувств, но также за счет интуиции и способности к обучению.
Наличие в АСУ чел о века-оператора дополнительно усложняет систему, так как требует специальных средств ввода сигналов от оператора (кнопок, переключатели и другие органы управления, объединенные в пульты /правления и рабочее место оператора) и средств отображения информации с переходом к десятичной системе счисления или графическим средствам (сигнальные лампы, стрелочные и цифровые индикаторы, совмещенные с мнемоническими схемами, табло, дисплеи).
При управлении сложными и многочисленными объектами взаимодействие оператора со средствами ввода/вывода информации становится серьезной проблемой не столько технического плана, сколько комплексной проблемой технического дизайна, эргономики и инженерной психологии. Наиболее остро это проявляется в почти полностью автоматизированных системах управления особо ответственными объектами (атомные реакторы, летательные аппараты, рельсовый транспорт, непрерывные прокатные станы), где за оператором остаются только функции наблюдения за работой системы и вмешательства при возникновении аварийных ситуаций. Для выработки у операторов необходимых навыков приходится создавать целые тренажерные комплексы, имитирующие поведение системы в различных режимах.
Различают четыре степени автоматизации или режима работы АСУ:
•Индикаторный режим, в котором системой производится контроль параметров объекта управления, сигнализация выхода их значений за допустимые пределы, ведение рабочих журналов, документирование итогов работы. Все управление осуществляется оператором.
•Режим советчика отличается от предыдущего тем, что в дополнение к сказанному система управления обеспечивает более
совершенную обработку информации и выработку конкретных предложений (рекомендуемых управляющих воздействий или задающих уставок) для достижения оптимального режима работы объекта.
• В режиме помощника большую или меньшую часть задач управления решает АСУ, упрощая и облегчая оператору управление. Например, система берет на себя функцию формирования требуемой плавной траектории движения, оставляя за оператором только выбор моментов начала разгона и торможения механизма. Следует заметить, что в любой ситуации управляющие воздействия оператора имеют
более |
высокий приоритет по отношению к воздействиям,34формируемым системой. |
• |
Режим автоматического управления полностью исключает оператора из замкнутого контура управления на период нормального |
функционирования системы.
Билет 11
1. -Основные устройства комбинационной логики (сумматоры, схемы сравнения, шифраторы/дешифраторы, мультиплексоры/демультиплексоры)
Для защиты информации во внешнем канале связи используются следующие устройства: скремблеры (при защите речевой информации, передаваемой по обычным телефонным каналам связи в режиме точка-точка), шифраторы/дешифраторы (для широковещательной связи) и криптографические средства, обеспечивающие шифрование передаваемого пакета. Однако их применение сопряжено с получением лицензий, что не всегда удается организовать оперативно. Поэтому интеграторы используют открытые для свободной эксплуатации средства, затрудняющие интерпретацию перехваченного пакета. Например, компания "ЛВС" предлагает туннелировать данные из одного сетевого протокола в другой.
Цифровой сумматор служит для арифметического сложения двоичных чисел. Простейший одноразрядный сумматор содержит 2 входа, на которые подаются суммируемые разряды и третий вход переноса из младшего разряда. Он также содержит 2 выхода. На первом формируется сумма, а на втором сигнал переноса в старший разряд. Многоразрядные сумматоры строятся путем соединения одноразрядных сумматоров.
Цифровой компаратор- устройство для сравнения двоичных чисел. Если числа не равны, то на выходе логический «0», равны- «1». В случае равенства разрядов сравниваемых чисел на выходах сумматоров логический «0», а на выходе устройствалогическая «1».
Мультиплексор предназначен для подключения одного из входов к единственному выходу. Кроме информационных входов мультиплексор содержит адресные(управляющие) входы, причем число информационных входов связано с числом адресных соотношением:
Демультиплексор – устройство, предназначенное для подключения одного входа к одному из выходов. Кроме информационного входа он содержит адресные входы, число которых связано с числом коммутируемых выходов тем же выражением, что и для мультиплексора.
Шифратор- логическое устройство с m входами и n выходами, преобразуещее сигнал логической «1» на одном из входов в соответствующий двоичный код на выходе.
Дешифратор – логическое устройство, предназначенное для преобразования n-разрядного двоичного кода на входе в сигнал логической «1» на одном из m выходов.
2. -Основные показатели качества систем автоматического управления Прямые показатели качества САУ. Косвенные показатели: запасы устойчивости по амплитуде и фазе.
max |
зона |
h уст. |
t 2p |
t1p |
tM |
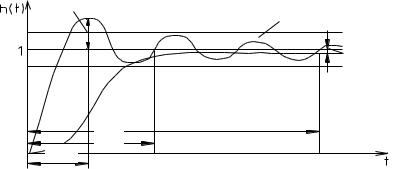
Прямые показатели качества определяются по переходному процессу замкнутой системы. Переходной процесс (h(t)) это реакция на единичную ступенчатую функцию.
t1 |
время рег улирования для 1 г о процесса ; |
|
|||||||||||||||||||||||||||||
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 |
время рег улирования для 2 г о процесса; |
|
|||||||||||||||||||||||||||||
p |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hуст. lim h(t) |
|
lim |
|
pWз |
( р) |
1 |
|
|
Wз (0); |
|
|
||||||||||||||||||||
p |
|
|
|||||||||||||||||||||||||||||
|
|
t |
|
|
|
|
|
p 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
Рассмотрим два случая. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
а) Есть интегрирующее звено. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Wp ( p) |
K(..) |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
p(..) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
K (..) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Wp ( p) |
|
|
|
|
|
|
|
|
|
|
|
|
K (..) |
|
|
|
|
|
|
|||||||||
Wз ( p) |
|
|
|
|
|
|
p(..) |
|
|
|
|
Wз (0) 1; |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
Wp ( p) |
1 |
|
K (..) |
|
|
p |
K (..) |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
p(..) |
|
|
(..) |
|
|
|
|
|
|
|
|||||||||||
б) Нет интегрирующего звена. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
Wp ( p) |
|
|
K(..) |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
(..) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Wз ( p) |
|
|
|
Wp ( p) |
|
|
|
|
|
K (..) |
|
, Wз (0) |
|
K |
1, |
(K 1); |
|||||||||||||||
1 Wp ( p) |
|
|
|
|
|
|
|
|
|
K |
|||||||||||||||||||||
|
|
|
1 |
K (..) |
1 |
|
|
||||||||||||||||||||||||
hуст. не обязательно равно 1. Показатели качества.
|
35 |
|
|
|
1. |
Точность САУ. Характеризуется: h 1 hуст. ; |
|
|
|
2. |
Время регулирования tp –это время, в течении которого переходной процесс попадает в некоторую |
зону и не выходит из неё. |
||
( 3 5% принимается) |
|
|
|
|
3. |
(только для колебательных процессов) |
|
|
|
Максимальное перерегулирование max hmax 1; |
|
|
|
|
4. |
Относительное перерегулирование % max 100%; |
|
|
|
|
hуст |
|
|
|
5. |
Время первого максимума tM (характеризует быстродействие, нарастание процесса); |
|
|
|
6. |
Число перерегулирований N. Число максимумов на время t 2p . |
|
|
|
Косвенные показатели качества делятся на: |
|
|
|
|
1. |
Частотные |
|
|
|
2. |
Корневые |
|
|
|
3. |
Интегральные |
|
|
|
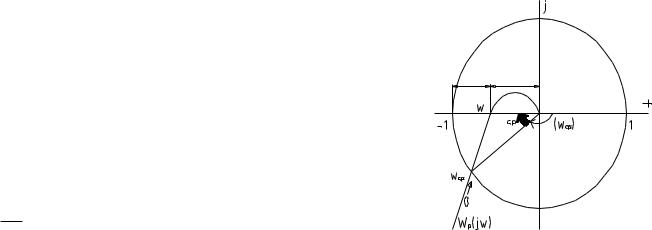
Частотные показатели качества характеризуют удаленность системы от границы устойчивости. |
|
|
||
Критерий Найквиста. |
|
|
|
|
(w ) ; |
|
|
|
|
А(w ) A ; |
|
|
|
|
A -запас устойчивости по амплитуде (зависит от К и Т). |
|
|
|
|
АЧХ зависит в большей степени от коэффициента усиления. Поэтому запас устойчивости |
|
|
||
по амплитуде показывает насколько может быть увеличен К, чтобы замкнутая система |
|
|
||
оставалась устойчивой. |
|
|
|
|
Запас устойчивости по фазе показывает насколько могут изменяться |
постоянные |
|
А |
|
времени, чтобы замкнутая система оставалась устойчивой. |
А |
|
||
|
|
|
||
wc |
частота среза; |
|
|
|
А(wc ) 1; |
|
|
||
|
|
|||
с ( с ) запас устойчивости по фазе; |
|
|
|
|
Кпред.-предельный коэффициент усиления, может быть найден по годографу. Это |
|
|
||
предельный коэффициент усиления разомкнутой системы , при котором замкнутая система |
|
|
||
попадает на границу устойчивости. |
|
|
|
|
Kпред. К ; |
|
|
|
|
|
А |
|
|
|
Если предельный коэффициент усиления больше коэффициента усиления разомкнутой системы, то система устойчива и обладает |
||||
запасом устойчивости (по фазе, модулю). В противном случае - система неустойчива. |
|
|
||
3. +Выбор канала восприятия в зависимости от вида информации. Эргономический пользовательский интерфейс Пользовательский интерфейс.
Нас с прикладной точки зрения прежде всего будет интересовать пользовательский интерфейс. Разработчики программных комплексов зачастую склонны рассматривать функциональность системы отдельно от её пользовательского интерфейса. При этом предполагается, что ПИ является своего рода дополнением к функциональности системы. Со своей стороны, пользователи программ, как правило, не разделяют функциональность и пользовательский интерфейс. Для пользователей именно ПИ является программой. Для них, если интерфейс хороший, стало быть и сама программа хороша и удобна.
Пользовательский интерфейс часто понимают только как внешний вид программы. Однако на деле пользователь воспринимает через ПИ всю систему в целом, а значит, такое понимание ПИ является слишком узким. В действительности ПИ включает в себя все аспекты дизайна, которые оказывают влияние на взаимодействие пользователя и системы. Это не только экран, который видит пользователь. Пользовательский интерфейс состоит из множества составляющих, таких как:
набор задач пользователя, которые он решает при помощи системы
используемая системой метафора (например, рабочий стол в MS Windows и т.п.)
элементы управления системой
навигация между блоками системы
визуальный (и не только) дизайн экранов программы.
Давно уже существуют технологии, позволяющие существенным образом улучшить ПИ. Однако сами по себе они не производят эргономичных интерфейсов. Так, например, сам по себе графический интерфейс пользователя не является более эргономичным, чем текстовый интерфейс, и, как показывает опыт, может быть менее пригоден к использованию, если разработан неправильно.
Для большинства систем на разработку ПИ уходит значительная доля бюджета и усилий программистов (количества строчек исходного текста программы). Проведенные исследования указывают на то, что:
ПИ составляет от 47 до 60 процентов кода всей программы
на разработку ПИ уходит как минимум 29 процентов проектного бюджета и в среднем 40 процентов всех усилий разработчиков по созданию системы.
Поскольку с точки зрения пользователя ПИ является ключевым фактором для понимания функциональности программы, плохо разработанный интерфейс резко ограничивает функциональность системы в целом. Компании, которые не стремятся провести разработку
эргономичного ПИ для своих продуктов и получить все36преимущества, которые обеспечивают современные технологии, ослабляют свои позиции в конкурентной борьбе.
Своевременно и профессионально выполненная разработка интерфейса приводит к увеличению эффективности ПО, уменьшению длительности обучения пользователей, снижению стоимости переработки системы после ее внедрения, полному использованию заложенной в ПО функциональности и т.п.
Отсутствие должного внимания со стороны разработчика программного обеспечения к интерфейсу может привести к резко негативным последствиям. Вот несколько реальных примеров:
Некая страховая компания инвестировала три миллиона долларов в информационную систему, предназначенную для поддержки работы независимых агентов, продающих ее услуги. Через некоторое время после внедрения системы, агенты полностью отказались от ее использования, поскольку не смогли обучиться работе с ней.
Крупная финансовая организация была вынуждена отказаться от почти полностью разработанной информационной системы, так как незадолго до ее внедрения компанией-разработчиком было проведено юзабилити–исследование, обнаружившее ошибку, допущенную при проектировании ПИ в модуле, ответственном за ввод данных. Ошибка была такова, что пользователи отказывались от использования модуля. На этом этапе было уже невозможно произвести необходимые изменения, в результате система так и не была внедрена.
Полный цикл обучения некоторым системам занимает до шести месяцев. При этом средний срок работы служащих на одном месте составляет всего восемнадцать месяцев.
Мощная и достаточно дорого обошедшаяся функциональность ПО для службы персонала никогда не была использована, потому что пользователи "разучивались" пользоваться ею уже через неделю после окончания обучения.
Между тем, ожидания пользователей меняются. Они уже знают, что создание программного обеспечения с дружественным интерфейсом возможно, и ожидают, что информационная система, которую они используют на работе, будет конкурентна по удобству и простоте освоения.
Преимущества хорошего ПИ
Системы, разработанные с учетом требований юзабилити, эргономичны. Они работают именно так, как пользователи ожидают, и позволяют пользователям фокусироваться на собственных задачах, а не особенностях взаимодействия с системой. Эргономичные программные продукты проще изучить, они более эффективны, они также позволяют минимизировать количество человеческих ошибок и увеличить субъективную удовлетворенность пользователей. Но это не случается само по себе. Эффективный интерфейс является результатом осознания разработчиком необходимости уделить значительное внимание не только данным, с которыми будет работать пользователь, но и собственно пользователю, его задачам и деятельности.
Выделим несколько наиболее существенных преимуществ хорошего пользовательского интерфейса с точки зрения бизнеса:
Снижение количества человеческих ошибок
Снижение стоимости поддержки систем
Снижение стоимости обучения
Уменьшение потерь продуктивности работников при внедрении системы и более быстрое восстановление утраченной продуктивности
Улучшение морального состояния персонала
Уменьшение расходов на редизайн ПИ по требованию пользователей
Доступность функциональности системы для максимального количества пользователей
Почти всегда при внедрении информационных систем общая эффективность организации увеличивается, при этом ряд исследований показывает, что грамотно разработанные ПИ может значимо увеличить эффективность по сравнению с просто внедренной ИС.
Одно из проведенных исследований, показало, что производительность увеличилась на четверть, а количество человеческих ошибок уменьшилось на четверть после проведения редизайна ПИ с учетом принципов юзабилити.
В другой компании обнаружилось, что, помимо прочих положительных эффектов, проведение полной переработки ПИ позволило сократить время обучения персонала на 35%, и повысить производительность труда в целом.
Исследование компании IBM показало, что проведенный с учетом человеческого фактора полный редизайн одной из их систем позволил сократить время обучения пользователей до одного часа. До проведения редизайна на изучение системы уходила неделя.
Билет 12
1. -Организация памяти ЭВМ
Глава 1. Общие принципы организации памяти ЭВМ Системы памяти современных ЭВМ представляют собой совокупность аппаратных средств, предназначенных для хранения
используемой в ЭВМ информации. К этой информации относятся обрабатываемые данные, прикладные программы, системное программное обеспечение и служебная информация различного назначения. К системе памяти можно отнести и программные средства, организующие управление ее работой в целом, а также драйверы различных видов запоминающих устройств.
Память представляет собой одну из важнейших подсистем ЭВМ, во многом определяющую их производительность. Тем не менее в течение всей истории развития вычислительных машин она традиционно считается их "узким местом".
Ключевым принципом построения памяти ЭВМ является ее иерархическая организация (принцип, сформулированный еще Джоном фон Нейманом), которая предполагает использование в системе памяти компьютера запоминающих устройств (ЗУ) с различными характеристиками. Причем с развитием технологий, появлением новых видов ЗУ и совершенствованием структурной организации ЭВМ количество уровней в иерархии памяти ЭВМ не только не уменьшается, но даже увеличивается. Например, сверхоперативные ЗУ больших ЭВМ 50-60-х годов заменяет двухуровневая кэш-память персональных ЭВМ 90-х годов.
В данной главе проводится классификация ЗУ с точки зрения особенностей их организации и использования. Затем рассматриваются типовые структуры систем памяти ЭВМ, а также основные параметры и критерии оценки запоминающих устройств и систем.
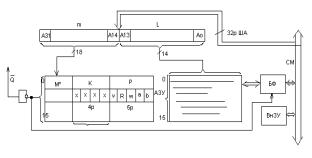
Центральным элементом яв-ся память, где хранится наша37микропрога. Для обычной памяти входной инфой яв-ся адрес, выходным-Д с этого адреса. КОП-код операции, qi-состояние упр автомата (адр след МК)(КОП-const, xi-const) ОУоперационное устройство или многофункциональное АЛУ.
Код команды процессора записыв-ся в Рг.МК , этот код задает в Рг.Адр.МК область памяти ЗУ в ктр прошита МК данной ком, Соотв-но для каждого вида операций(другого кода ком-ды) в памяти МПрог выделяется своя область т.к. при выполн. МПрог в зависимости от признаков сост ОУ xi формир разл последов упр возд yi,то они так же оказыв влияние на адрес формиров-я след-го yi т.к. при неизменном коде опер и условиях xi возникает необход в формиров последов-ти yi , то в ЗУ прописыв-ся адрес следующ yi (адрес qi)которое формируется на следующ шаге (программный счетчик). Если в качестве ЗУ использ ПЗУ то процессор имеет жестко заданную сист команд (все микропроц-ры широкого прим так и работают) но в общем случае в место ПЗУ можно использ ОЗУ тогда проц-р можно перенастраивать под различные сист-мы команд (напр сделать совместными проги под Intel и Motorola (Mac)).
Достоинства с Микропрограммным управлением: 1)Каждая ком имеет свою область памяти микропрограмм(измен одной ком не приводит к необх переделки остальн ком) 2)Для выполн каждой ком-ды выделяется столько времени сколько необх-мо (длительности выполн всех команд различны и минимальны)
Виртуальная память.
Вирт память создает у польз-ля иллюзию будто бы при небольш (ограниченных) объемах физ ОЗУ, пользов-ль имеет очень большие объемы ОЗУ. Это достигается за счет использ внешних носителей инф.(напр винт,стримеры, магнитные ленты, CD-ROM,Zip,Flash)
Пусть пользователь имеет 256Кбайт – физ ОЗУ ША – 32-разр, адресное пространство 232=4 Гб
При орг Вирт памяти физ ОЗУ разбивается на страницы (размер произв опр-ся разработчиком). Пусть 1стр-16кбайт=214 Все адр пространство разбивается на страницы. Nстр=232/214=218=256кбайт страниц. В физ ОЗУ может нах-ся 16 стр.
М-абс номер стр18 разр L-номер ячейки на стр Р-поля признаков
Контроллер виртуальной памяти содержит: ассоциативное ЗУэто ОЗУ в котором входной инф явл-ся данные, а выходом явл адрес ячейки где эти данные нах-ся. Контроллер Вирт памяти имеет столько ячеек АЗУ сколько физ страниц может располагаться в ОЗУ (в данном примере 16 ячеек). Процессор выставляет 32-р адр на ША, АЗУ сравнивает абсолютный номер страницы М с номерами страниц М* загруженными в физ ОЗУ,если М=М*, то данная страница нах-ся в физ ОЗУ и № этой стр в физ ОЗУ задается полем К(4р), поле К возбуждает эту стр в физ ОЗУ, младш часть адреса L возбуждает ячейку памяти на выбранной странице, формируется сигнал Q который открывает буфер(Эл-т с 3 сост) и подключает физ ОЗУ с Системной Магистрали. Если
М≠М* это означает что данной стр в физ ОЗУ нет. Формируется сигнал неQ который вызывает подпрогу прерывания проц которой требуется загр недостающую стр внешн ЗУ (в качестве внешнего ЗУ может быть винт) в физ ОЗУ, при этом необх-мо сделать следующее: 1)Анализируется поле признаков, проверяется поле v (v по сбросу сбрас в 0 изначально ЗУ пустое).Если осущ запись стр в физ ОЗУ v устанавливается в 1. Чтобы уничножить стр достаточно v=0. Если v=0 значит в физ ОЗУ есть своб стр и на это место можно загр недостающую стр из внеш ЗУ .
2)Если все v=1 ,анализир признак старости стр R.Обычно признак старости R периодически сбрас в 0 по таймеру, при обращении к стр R автомат уст в 1.Если R=0 это значит что к данной стр давно не было обращений и на ее место можно загр требуемую стр, при этом возм след вариант:
а)Во время работы со старой стр команда записи не проходила, признак команды записи W=0 означает что точная копия этой стр нах-ся на винте => ее можно стирать в ОЗУ(v=0).
б)Проходила команда записи(w=1) означает что инф в ОЗУ отличается от копии на винте, тогда необходимо переписать инф с данной стр обратно на винт. Затем загрузить новую стр на место старой.
3)При работе со стр анализир-ся признаки приоритетов стр a и b.
a |
b |
|
0 |
0 |
-только для чтения ОС |
0 |
1 |
-чтение + запись ОС |
1 |
0 |
-чтение польз-ля + все действияОС |
1 |
1 |
-чт/запись польз+все действияОС |
|
Если объем стр мал, прерывание на данную стр происходит часто, “закачивается” инф маленькими порциями, но если объем стр большой прерыв происх реже, но перегоняются большие объемы инф. Для орг вирт памяти требуются средства аппаратной поддержки.
Увеличение объема памяти приводит к уменьш быстродейств (время на дешифрацию) .Кроме этого обращение в внешн памяти (выход за пределы кристалла) снижает быстр примерно на порядок по сравн с быстр внутри кристалла (СРU≈2 ГГц, обращение к памяти 125-133 МГц). Подавляющее большинство программ носит циклический характер.
КЭШ память предназначена для хранения последних наиболее часто встречающихся команд. КЭШ-память располагается или внутри кристалла проц или максимально близко к нему и время обр к КЭШ-памяти не порядок быстрее чем к глобальному ДОЗУ.
|
Копия в КЭШ |
Инф |
|
|
|
В КЭШ |
В гл ДОЗУ |
|
|
|
|
|
||
Чтение |
Есть |
Чтение |
- |
|
Нет |
Запись+след слово |
Чтение |
|
|
|
|
|||
Запись |
Есть |
-(обновл) |
Запись |
|
Нет |
- |
Запись |
|
|
|
|
|||
Модуль памяти предствляется в виде 32 разрядных слов при 16 разрядной ША. После каждого обращения к ДОЗУ в КЭШ записывается |
||||
32 разрядное слово (16 разрадов, которые просит проц и 16 разрядов следущих). Т.к. вероятность выборки следующего слова большая, это уменьшает число обращений к глобальному ДОЗУ Адрес в контролере КЭШ трактуется следующим образом:
Младш часть адреса L выбирает одну из ячеек КЭШ-памяти (разрядность L определяется количеством ячеек в КЭШ).
Старш часть адр M сравнивается со старшей частью адреса, записанного в ячейку КЭШ (Tag). Если они совпадают, то это значит, что по данному адресу уже было обращение и в КЭШ есть быстрая копия, тогда формируется сигнал Hit, который сообщает системному контролеру, что цикл обращения быстрый, открывает MX, и с помощью сигнала A1 выбирается соответствующее 16 разрядное слово из КЭШ.
Если они не совпали, значит в КЭШ копии нет, Hit равен 1, идет38обращение к глобальному ДОЗУ и одновременно в КЭШ в возбужденную ячейку (младшим адресом L) записывается старшая часть адреса на место Tag и данные на место D0 и D1.
О том, что в КЭШ памяти находятся данные сообщает признак истинности V (после системного сброса V устанавливается в 0, при записи в 1). Т.к. L небольшая и она одинакова для различных значений M, для того чтобы можно было хранить хотя бы два различных слова с одинаковым L в КЭШ организуется два банка (они идентичны). Для того чтобы выбрать банк куда надо записывать последнюю копию используется признак старости S.
КЭШ дает выигрыш в быстродействии только в цикле чтения. Циклы записи имеют то же время.
2. -Назначение и функции операционных систем Операционная система - комплекс программ, функциями которого является контроль за использованием и распределением ресурсов
вычислительной системы. Операционная система компьютера представляет собой комплекс взаимосвязанных программ, который действует как интерфейс между приложениями и пользователями с одной стороны, и аппаратурой компьютера с другой стороны. Функции операционной системы: Управление процессами ( Для каждого вновь создаваемого процесса ОС генерирует системные информационные структуры, которые содержат данные о потребностях процесса в ресурсах вычислительной системы, а также о фактически выделенных ему ресурсах. Таким образом, процесс можно также определить как некоторую заявку на потребление системных ресурсов.) Управление памятью (Управление памятью включает распределение имеющейся физической памяти между всеми существующими в системе в данный момент процессами, загрузку кодов и данных процессов в отведенные им области памяти, настройку адресно-зависимых частей кодов процесса на физические адреса выделенной области, а также защиту областей памяти каждого процесса.) Управление файлами и внешними устройствами (Операционная система виртуализирует отдельный набор данных, хранящихся на внешнем накопителе, в виде файла — простой неструктурированной последовательности байтов, имеющей символьное имя. Для удобства работы с данными файлы группируются в каталоги, которые, в свою очередь, образуют группы - каталоги более высокого уровня. Пользователь может с помощью ОС выполнять над файлами и каталогами такие действия, как поиск по имени, удаление, вывод содержимого на внешнее устройство (например, на дисплей), изменение и сохранение содержимого.) Интерфейс прикладного программирования (Прикладные программисты используют в своих приложениях обращения к ОС, когда для выполнения тех или иных действий им требуется особый статус, которым обладает только операционная система. Например, в большинстве современных ОС все действия, связанные с управлением аппаратными средствами компьютера, может выполнять только ОС. Помимо этих функций прикладной программист может воспользоваться набором сервисных функций ОС, которые упрощают написание приложений.) Пользовательский интерфейс (Операционная система должна обеспечивать удобный интерфейс не только для прикладных программ, но и для человека, работающего за терминалом. Этот человек может быть конечным пользователем, администратором ОС или программистом.)
Под ОС понимают комплекс управляющих и обрабатывающих программ, который, с одной стороны, выступает как интерфейс между аппаратурой компьютера и пользователем с его задачами, а с другой — предназначен для наиболее эффективного использования ресурсов вычислительной системы и организации надежных вычислений. Любой из компонентов прикладного ПО обязательно работает под управлением ОС. Ни один из компонентов ПО, за исключением самой ОС, не имеет непосредственного доступа к аппаратуре компьютера. Даже пользователи взаимодействуют со своими программами через интерфейс ОС. Любые их команды, прежде чем попасть в прикладную программу, сначала проходят через ОС.
Основные функции ОС:
прием от пользователя заданий или команд, сформулированных на соответствующем языке и их обработка;
прием и исполнение программных запросов на запуск, приостановку, остановку других программ;
загрузка в оперативную память подлежащих исполнению программ;
инициация программы – передача ей управления, в результате чего процессор исполняет программу;
идентификация всех программ и данных;
обеспечение работы систем управлений файлами (СУФ) и/или систем управления БД (СУБД), что позволяет резко увеличить эффективность всего ПО;
обеспечение режима мультипрограммирования, то есть выполнение двух или более программ на одном процессоре, создающее видимость их одновременного исполнения;
обеспечение функций по организации и управлению всеми операциями ввода/вывода;
удовлетворение жестким ограничениям на время ответа в режиме реального времени;
распределение памяти, а в большинстве современных систем и организация виртуальной памяти;
планирование и диспетчеризация задач в соответствии с заданной стратегией и дисциплинами обслуживания; организация механизмов обмена сообщениями и данными между выполняющимися программами;
защита одной программы от влияния другой;
обеспечение сохранности данных;
предоставление услуг на случай частичного сбоя системы;
обеспечение работы систем программирования, с помощью которых пользователи готовят свои программы
Понятие операционной среды.
ОС выполняет функции управления вычислительными процессами в вычислительной системе, распределяет ресурсы вычислительной системы между различными вычислительными процессами и образует программную среду, в которой выполняются прикладные программы пользователей. Такая среда называется операционной.
Развитие ОС пошло по пути выделения наиболее часто встречающихся операций и создания для них соответствующих программных модулей, которые можно в дальнейшем использовать в создаваемых программах.
При разработке первых систем программирования, прежде всего, создавали программные модули для подсистемы ввода/вывода, а уже затем
— вычисления часто встречающихся математических операций и функций.
Следующий шаг в автоматизации создания готовых к выполнению машинных двоичных программ заключался в том, что транслятор с алгоритмического языка более высокого уровня, нежели первые ассемблеры, уже сам мог подставить вместо высокоуровневого оператора типа READ или WRITE все необходимые вызовы к готовым библиотечным программным модулям. Состав и количество библиотек систем программирования постоянно увеличивались. В конечном итоге возникла ситуация, когда при создании двоичных машинных программ программисты могут вообще не знать многих деталей управления конкретными ресурсами вычислительной системы, а должны только обращаться к некоторой программной подсистеме с соответствующими вызовами и получать от нее необходимые функции и сервисы. Эта программная подсистема и есть ОС, а набор ее функций, сервисов и правила обращения к ним как раз и образуют то базовое понятие,
которое называется операционной средой. Т.е. термин 39операционная среда означает, прежде всего, соответствующие интерфейсы, необходимые программам и пользователям для обращения к ОС с целью получить определенные сервисы.
Параллельное существование терминов ОС и операционная среда вызвано тем, что ОС в общем случае может поддерживать несколько операционных сред.
3. +Устройства для логической структуризации сетей (мосты и коммутаторы)
Мосты и коммутаторы – устройства логической структуризации сетей, работающие на канальном уровне стека протоколов. Структуризация сети возможна также на основе маршрутизаторов, которые для выполнения этой задачи привлекают протоколы сетевого уровня. Каждый способ структуризации - с помощью канального протокола и с помощью сетевого протокола - имеет свои преимущества и недостатки. В современных сетях часто используют комбинированный способ логической структуризации - небольшие сегменты объединяются устройствами канального уровня в более крупные подсети, которые, в свою очередь, соединяются маршрутизаторами.
Итак, сеть можно разделить на логические сегменты с помощью устройств двух типов - мостов (bridge) и/или коммутаторов (switch, switching hub). Мост и коммутатор - это функциональные близнецы. Оба эти устройства продвигают кадры на основании одних и тех же алгоритмов. Мосты и коммутаторы используют два типа алгоритмов: алгоритм прозрачного моста (transparent bridge), либо алгоритм моста с маршрутизацией от источника (source routing bridge) компании IBM для сетей Token Ring. Эти стандарты были разработаны задолго до появления первого коммутатора, поэтому в них используется термин «мост».
Основное отличие коммутатора от моста заключается в том, что мост обрабатывает кадры последовательно, а коммутатор - параллельно. При возрастании трафика и необходимости разделения сети на большое количество сегментов классические мосты перестали справляться с нагрузкой. Один процессорный блок не мог обслужить поток кадров между несколькими портами. С развитием технологической базы появилась возможность для обслуживания потока, поступающего на каждый порт, добавить в устройство отдельный специализированный процессор, который реализовывал алгоритм моста. По сути, коммутатор - это мультипроцессорный мост, способный параллельно продвигать кадры сразу между всеми парами своих портов.
Прозрачные мосты незаметны для сетевых адаптеров конечных узлов, так как они самостоятельно строят специальную адресную таблицу, на основании которой можно решить, нужно передавать пришедший кадр в какой-либо другой сегмент или нет. Сетевые адаптеры при использовании прозрачных мостов работают точно так же, как и в случае их отсутствия, то есть не предпринимают никаких дополнительных действий, чтобы кадр прошел через мост. Алгоритм прозрачного моста не зависит от технологии локальной сети, в которой устанавливается мост, поэтому прозрачные мосты Ethernet работают точно так же, как прозрачные мосты FDDI.
Прозрачный мост строит свою адресную таблицу на основании пассивного наблюдения за трафиком, циркулирующим в подключенных к его портам сегментах. При этом мост учитывает адреса источников кадров данных, поступающих на порты моста. По адресу источника кадра мост делает вывод о принадлежности этого узла тому или иному сегменту сети.
Каждый порт моста работает как конечный узел своего сегмента за одним исключением - порт моста не имеет собственного МАС-адреса. Порт моста работает в так называемом неразборчивом (promisquous) режиме захвата пакетов, когда все поступающие на порт пакеты запоминаются в буферной памяти. С помощью такого режима мост следит за всем трафиком, передаваемым в присоединенных к нему сегментах, и использует проходящие через него пакеты для изучения состава сети. Так как в буфер записываются все пакеты, то адрес порта мосту не нужен.
В исходном состоянии мост ничего не знает о том, компьютеры с какими МАС-адресами подключены к каждому из его портов. Поэтому в этом случае мост просто передает любой захваченный и буферизованный кадр на все свои порты за исключением того, от которого этот кадр получен. Отличие работы моста в этом режиме от повторителя в том, что он передает кадр не побитно, а с буферизацией. Буферизация разрывает логику работы всех сегментов как единой разделяемой среды. Когда мост собирается передать кадр с сегмента на сегмент, он заново пытается получить доступ к среде как конечный узел по правилам алгоритма доступа.
Одновременно с передачей кадра на все порты мост изучает адрес источника кадра и делает новую запись о его принадлежности в своей адресной таблице, которую также называют таблицей фильтрации или маршрутизации. После того как мост прошел этап обучения, он может работать более рационально. Если абоненты находятся в разных сегментах, то мост выполняет операцию продвижения (forwarding) кадра - передает кадр на другой порт, предварительно получив доступ к другому сегменту. Если бы оказалось, что компьютеры принадлежат одному сегменту, то кадр просто был бы удален из буфера и работа с ним на этом бы закончилась. Такая операция называется фильтрацией
(filtering).
Если же адрес назначения неизвестен, то мост передает кадр на все свои порты, кроме порта - источника кадра, как и на начальной стадии процесса обучения.
Мост постоянно следит за адресами источника буферизуемых кадров, чтобы быть в состоянии автоматически приспосабливаться к изменениям, происходящим в сети, - перемещениям компьютеров из одного сегмента сети в другой, появлению новых компьютеров. С другой стороны, мост не ждет, когда адресная таблица заполнится полностью (да это и невозможно, поскольку заранее не известно, сколько компьютеров и адресов будут находиться в сегментах моста). Как только в таблице появляется первый адрес, мост пытается его использовать, проверяя совпадение с ним адресов назначения всех поступающих пакетов.
Входы адресной таблицы могут быть динамическими, создаваемыми в процессе самообучения моста, и статическими, создаваемыми вручную администратором сети. Динамические входы имеют срок жизни - при создании или обновлении записи в адресной таблице с ней связывается отметка времени. По истечении определенного тайм-аута запись помечается как недействительная, если за это время мост не принял ни одного кадра с данным адресом в поле адреса источника. Статические записи не имеют срока жизни, что дает администратору возможность подправлять работу моста, если это необходимо.
Кадры с широковещательными МАС-адресами передаются мостом на все его порты, как и кадры с неизвестным адресом назначения. Такой режим распространения кадров называется затоплением сети (flood). Наличие мостов в сети не препятствует распространению широковещательных кадров по всем сегментам сети, сохраняя ее прозрачность. Однако это является достоинством только в том случае, когда широковещательный адрес выработан корректно работающим узлом. Однако часто случается так, что в результате каких-либо программных или аппаратных сбоев протокол верхнего уровня или сам сетевой адаптер начинают работать некорректно и постоянно с высокой интенсивностью генерировать кадры с широковещательным адресом в течение длительного промежутка времени. Мост в этом
случае передает эти кадры во все сегменты, затапливая сеть40ошибочным |
трафиком. |
Такая |
ситуация |
называется |
широковещательным штормом (broadcast storm). |
|
|
|
|
К сожалению, мосты не защищают сети от широковещательного шторма, во всяком случае, по умолчанию, как это делают маршрутизаторы. Максимум, что может сделать администратор с помощью моста для борьбы с широковещательным штормом - установить для каждого узла предельно допустимую интенсивность генерации кадров с широковещательным адресом. Но при этом нужно точно знать, какая интенсивность является нормальной, а какая - ошибочной. При смене протоколов ситуация в сети может измениться, и то, что вчера считалось ошибочным, сегодня может оказаться нормой. Таким образом, мосты располагают весьма грубыми средствами борьбы с широковещательным штормом.
Мосты с маршрутизацией от источника применяются для соединения колец Token Ring и FDDI, хотя для этих же целей могут использоваться и прозрачные мосты. Маршрутизация от источника (Source Routing, SR) основана на том, что станция-отправитель помещает в посылаемый в другое кольцо кадр всю адресную информацию о промежуточных мостах и кольцах, которые должен пройти кадр перед тем, как попасть в кольцо, к которому подключена станция-получатель. Хотя в название этого способа входит термин «маршрутизация», настоящей маршрутизации в строгом понимании этого термина здесь нет, так как мосты и станции по-прежнему используют для передачи кадров данных только информацию МАС-уровня, а заголовки сетевого уровня для мостов данного типа по-прежнему остаются неразличимой частью поля данных кадра.
Мосты с маршрутизацией от источника имеют по сравнению с прозрачными мостам как преимущества, так и недостатки, отраженные в таблице:
Преимущества |
Недостатки |
Более рациональные маршруты |
Более дорогие сетевые адаптеры, принимающие |
|
участие в маршрутизации |
Проще и дешевле - не нужно строить таблицы |
Сеть непрозрачна - кольца имеют номера |
фильтрации |
|
Более высокая скорость - не нужно просматривать |
Увеличивается трафик за счет широковещательных |
таблицы фильтрации |
пакетов |
Сегодня принят стандарт, который позволяет объединить обе технологии работы моста в одном устройстве. Этот стандарт, называемый SRT (Source Route Transparent), позволяет мосту работать в любом режиме. Мост просматривает специальные флаги в заголовке кадров Token Ring и автоматически определяет, какой из алгоритмов нужно применить.
Слабая защита от широковещательного шторма - одно из главных ограничений моста, но не единственное. Другим серьезным ограничением их функциональных возможностей является невозможность поддержки петлеобразных конфигураций сети.
Технология коммутации сама по себе не имеет непосредственного отношения к методу доступа к среде, который используется портами коммутатора. При подключении сегментов, представляющих собой разделяемую среду, порт коммутатора должен поддерживать полудуплексный режим, так как является одним из узлов этого сегмента. Однако, когда к каждому порту коммутатора подключен не сегмент, а только один компьютер, причем по двум раздельным каналам, как это происходит почти во всех стандартах физического уровня, кроме коаксиальных версий Ethernet, ситуация становится не такой однозначной. Порт может работать как в обычном полудуплексном режиме, так и
вполнодуплексном. Подключение к портам коммутатора не сегментов, а отдельных компьютеров называется микросегментацией.
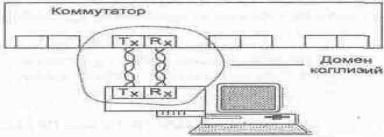
Вобычном режиме работы порт коммутатора по-прежнему распознает коллизии. Доменом коллизий в этом случае будет участок сети, включающий передатчик коммутатора, приемник коммутатора, передатчик сетевого адаптера компьютера, приемник сетевого адаптера компьютера и две витые пары, соединяющие передатчики с приемниками (см. рисунок).
Рис.: Домен коллизий, образуемый компьютером и портом коммутатора
В полнодуплексном режиме одновременная передача данных передатчиком порта коммутатора и сетевого адаптера коллизией не считается. В принципе, это достаточно естественный режим работы для индивидуальных полнодуплексных каналов связи, и он часто используется в протоколах территориальных сетей. При
полнодуплексной связи порты Ethernet могут передавать данные со скоростью 20 Мбит/с - по 10 Мбит/с в каждом направлении.
Естественно, необходимо, чтобы МАС-узлы взаимодействующих устройств поддерживали этот специальный режим. В случае когда только один узел будет поддерживать полнодуплексный режим, второй узел будет постоянно фиксировать коллизии и приостанавливать свою работу, в то время как другой узел будет продолжать передавать данные, которые никто в этот момент не принимает. Изменения, которые нужно сделать в логике МАС-узла, чтобы он мог работать в полнодуплексном режиме, минимальны - нужно просто отменить фиксацию и отработку коллизий в сетях Ethernet, а в сетях Token Ring и FDDI - посылать кадры в коммутатор, не дожидаясь прихода токена доступа, а тогда, когда это нужно конечному узлу. Фактически, при работе в полнодуплексном режиме МАС-узел не использует метод доступа к среде, разработанный для данной технологии.
При работе порта в полудуплексном режиме коммутатор не может изменять протокол, зато у коммутатора появляется возможность воздействовать на конечный узел с помощью механизмов алгоритма доступа к среде, который конечный узел обязан отрабатывать. Эти приемы основаны на том, что конечные узлы строго соблюдают все параметры алгоритма доступа к среде, а порты коммутатора - нет. Обычно применяются два основных способа управления потоком кадров - обратное давление на конечный узел (создание искусственных коллизий в сегменте, который чересчур интенсивно посылает кадры в коммутатор) и агрессивный захват среды (коммутатор выдерживает меньшую, по сравнению со стандартной, технологическую паузу).
Основными показателями коммутатора, характеризующими его производительность, являются:
скорость фильтрации кадров;
скорость продвижения кадров;
пропускная способность;
задержка передачи кадра.