

4. Синтез рекурсивных цифровых фильтров методом билинейного z – преобразования
Передаточная характеристика аналогового фильтра связана с импульсной характеристикой фильтра прямым преобразованием Лапласа
![]()
По аналогии с предыдущим соотношением дискретное преобразование Лапласа импульсной характеристики цифрового фильтра определяется выражением
![]()
Системная функция цифрового фильтра представляет собой Z-преобразование импульсной характеристики фильтра
![]()
Из сопоставления двух последних соотношений следует, что для нахождения H(z) при известной передаточной характеристике аналогового фильтра-прототипа нужно сделать подстановку
![]() (П.4)
(П.4)
Передаточная характеристика аналогового фильтра-прототипа K(p) представляет собой дробно-рациональную функцию, у которой числитель и знаменатель выражаются полиномами относительно комплексной переменной p
![]()
Подстановка (П.4) не позволяет получить системную функцию в виде дробно-рациональной функции с полиномами относительно комплексной переменной z в числителе и знаменателе
![]()
Чтобы найти системную функцию воспользуемся разложением ln(z) в ряд и ограничим количество членов этого ряда. Для этого сначала представим z в виде
![]() .
.
Найдем приближенное значение
![]() .
.
Выражая α через z и подставляя в последнее соотношение, получим
![]() .
.
После подстановки последнего соотношения в (П.4) получим
![]() (П.5)
(П.5)
Это соотношение получило название билинейного Z- преобразования.
Докажем, что билинейное Z-преобразование преобразует устойчивый аналоговый фильтр в устойчивый цифровой фильтр. Для этого из последнего соотношения выразим z через p = + j, обозначив a = 2/TД
![]()
Откуда
![]()
Из этого соотношения
видно, что при <0
(условие устойчивости аналогового
фильтра-прототипа)
![]() (условие
устойчивости цифрового фильтра). На
рисунке П.1 показаны затемненные области
устойчивости аналогового фильтра –
прототипа в плоскости p
и цифрового фильтра в плоскости z.
(условие
устойчивости цифрового фильтра). На
рисунке П.1 показаны затемненные области
устойчивости аналогового фильтра –
прототипа в плоскости p
и цифрового фильтра в плоскости z.
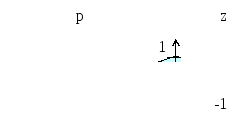
Рисунок П.1 – Области устойчивости цифрового фильтра и аналогового прототипа
Таким образом, билинейное Z-преобразование преобразует левую полуплоскость плоскости p в круг единичного радиуса с центром в начале координат.
Найдем связь между цифровыми и аналоговыми частотами, на которых коэффициенты передачи цифрового фильтра и аналогового фильтра-прототипа одинаковы.
Используя билинейное Z – преобразование, можно выразить передаточную характеристику аналогового фильтра через системную функцию цифрового фильтра
![]()
Следовательно, комплексный коэффициент передачи аналогового фильтра можно выразить через системную функцию цифрового фильтра
![]()
С другой стороны, комплексный коэффициент передачи цифрового фильтра связан с системной функцией следующим соотношением
![]()
Из двух последних соотношений видно, что коэффициенты передачи цифрового фильтра и аналогового фильтра-прототипа равны при выполнении условия
![]()
Преобразуя последнее соотношение, получим
![]() (П.6)
(П.6)
Таким образом, частота аналогового фильтра – прототипа связана с частотой цифрового фильтра при равенстве их комплексных коэффициентов передачи нелинейной зависимостью. Из рисунка П.2 видно, что эта нелинейная зависимость вызывает сжатие АЧХ цифрового фильтра по сравнению с АЧХ аналогового фильтра – прототипа.
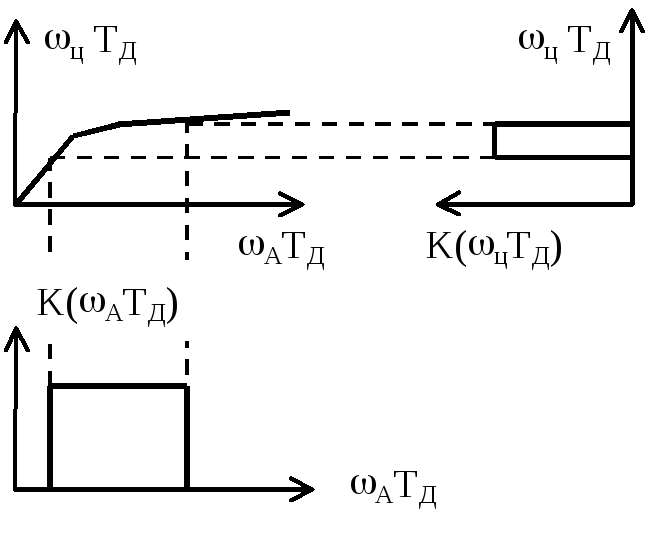
Рисунок П.2 – АЧХ цифрового фильтра и аналогового фильтра – прототипа при
использовании билинейного Z – преобразования
Чтобы избежать сужения полосы пропускания цифрового фильтра аналоговый прототип рассчитывают, исходя не из граничных частот полосового фильтра, а из граничных аналоговых частот, определенных по (П.3) при подстановке в эту формулу граничных частот цифрового фильтра. При этом получают цифровой фильтр с требуемыми граничными частотами.
Из (П.6) следует также, что чем выше частота дискретизации, тем ближе частота аналогового фильтра – прототипа к частоте цифрового фильтра.
Если частота
цифрового фильтра удовлетворяет условию
![]() ,
то с погрешностью не более 5% можно
считать аналоговую и цифровую частоты
одинаковыми.
,
то с погрешностью не более 5% можно
считать аналоговую и цифровую частоты
одинаковыми.