

13. Характеристики дифференцирующей цепи и линии задержки.
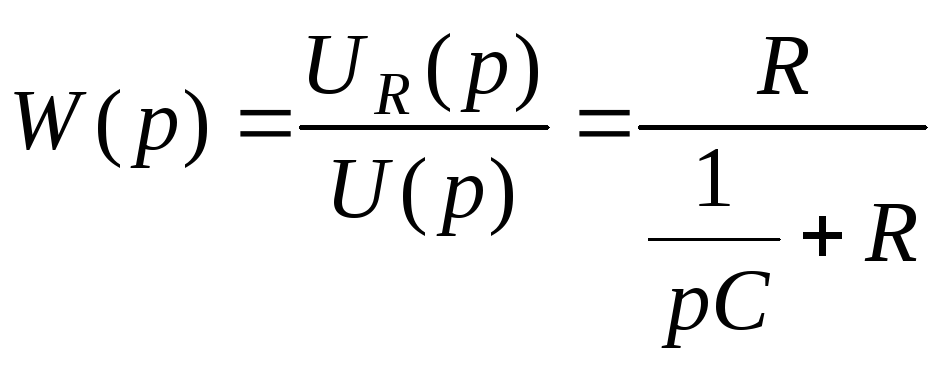
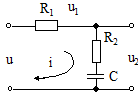
Схема дифференцирующей цепи приведена
на рис. 4.7.б. Изображение по Лапласу
напряжений на элементах схемы
![]() ,
тогда с учетом (4.4) получим:
,
тогда с учетом (4.4) получим:
![]() ,
,![]() .
.
По определению
 .
.
Умножив числитель и знаменатель на рС,
получим:
![]() , где T = RC - постоянная времени RC-цепи.
, где T = RC - постоянная времени RC-цепи.
Этой передаточной функции соответствует
дифференциальное уравнение, следующее
из соотношения:
![]() , откуда
, откуда![]() .
.
Здесь
![]() .
.
Основные характеристики дифференцирующей цепи:
ККП
![]() ;
;![]() ;
;![]() ;
;
АЧХ
![]() ;
;
ЛАЧХ
![]() ;
;
ФЧХ
![]() ;
;
ПХ
![]()
![]() ;
;
ИХ
![]() =
=![]() .
.
На рис. 4.9 приведены годограф ККП, ЛАЧХ, ЛФЧХ, ПХ и ИХ дифференцирующей цепи, а также кусочно-линейная аппроксимация ЛАЧХ.

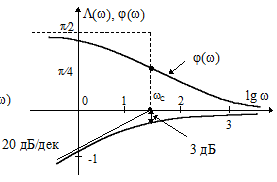
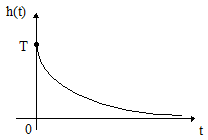

Рис. 4.9 График годографа ККП, ЛАЧХ, ЛФЧХ, ПХ и ИХ
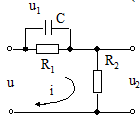
14. Корректирующее звено с отставанием по фазе.
Схема корректирующего звена с отставанием
по фазе приведена на рис. 4.10.а. Это звено
называют также пропорционально-интегрирующим
фильтром. Сигналом
![]() в этом звене является напряжение на
цепи
в этом звене является напряжение на
цепи![]() .
.
По определению
![]() , где
, где![]() ,
,![]() =
=![]() .
.
С учетом
![]() ,
,![]() ,
,![]() (4.2) имеем
(4.2) имеем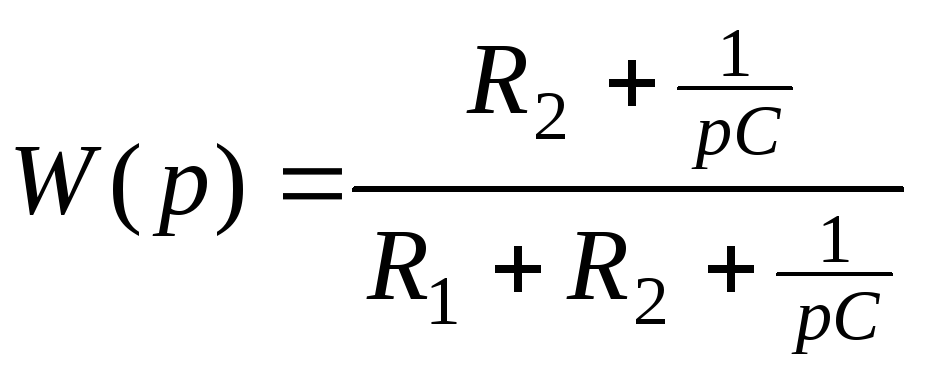 =
=![]() .
.
Удобнее это выражение представить в
виде:
![]() , где
, где![]() ,
,![]() .
.
Основные характеристики:
ККП
![]() ;
;
АЧХ
![]() ;
;
ЛАЧХ
![]() ;
;
ФЧХ
![]() .
.
На рис. 4.10.б приведены ЛФЧХ и кусочно-линейная
аппроксимация ЛАЧХ корректирующего
звена с отставанием по фазе. Из этого
рисунка видно, что ЛФЧХ отклоняется в
отрицательную сторону только в окрестности
частот
![]() и
и![]() . Исследуем функцию
. Исследуем функцию![]() на экстремум. Для этого решим уравнение
на экстремум. Для этого решим уравнение![]() и получим
и получим![]() при
при![]() .
.
(а)
(б)
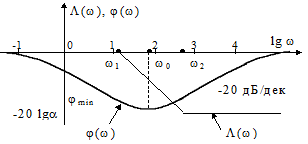
Рис. 4.10 Схема корректирующего звена с
отставанием по фазе и его характеристики
![]() и
и![]() .
.
15. Корректирующее звено с опережением по фазе.
Схема корректирующего звена с опережением
по фазе приведена на рис. 4.11.а. Это звено
называют также пропорционально-дифференцирующим
фильтром. Выходным сигналом
![]() в этом звене является напряжение на
резисторе
в этом звене является напряжение на
резисторе![]() .
.
(а)
(б)
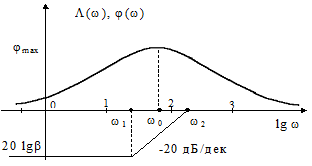
Рис. 4.11 Схема корректирующего звена с
опережением по фазе и его характеристики
![]() и
и![]() .
.
По определению
![]() , где
, где![]() ,
,![]() =
= .
.
Тогда с учетом
![]() ,
,![]() ,
,![]() (4.2) имеем:
(4.2) имеем: ,
где
,
где![]() ,
,![]() .
.
Основные характеристики:
ККП
![]() ;
;
АЧХ
![]() ;
;
ЛАЧХ
![]() ;
;
ФЧХ
![]() .
.
На рис. 4.11.б приведены ЛФЧХ и кусочно-линейная
аппроксимация ЛАЧХ корректирующего
звена с опережением по фазе. Из этого
рисунка видно, что ЛФЧХ отклоняется в
положительную сторону только в окрестности
частот
![]() и
и![]() .
.
Исследуем функцию
![]() на экстремум. Для этого решим уравнение
на экстремум. Для этого решим уравнение![]()
и получим:
![]() при
при![]() .
.
16. Электродвигатели постоянного тока. Принцип действия, устройство, схемы включения, передаточная функция, достоинства, недостатки.
Основными исполнительными устройствами в системах автоматического управления, обеспечивающими вращение, перемещение, сжатие, растяжение и другие воздействия на объект, являются электродвигатели. Они превращают электрическую энергию в механическую энергию вращения. Вращательное движение может быть преобразовано в поступательное с помощью червячных передач или других механизмов. Принцип работы электродвигателей постоянного тока основан на законе Ампера.
На рис. 4.13 показано направление сил Ампера, действующих на провода с током в виде прямоугольной рамки, находящейся в постоянном магнитном поле.
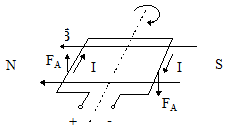
Рис. 4.13 Действие сил Ампера на рамку с током в постоянном магнитном поле
Из этого рисунка видно, что направление силы Ампера определяется по правилу левой руки: направление тока совпадает с направлением пальцев кисти, магнитные силовые линии входят в ладонь, а большой палец указывает направление силы Ампера.
Под действием этой силы рамка повернется вокруг оси по часовой стрелке.
Для работы электродвигателя постоянного тока необходимо создать в пространстве вокруг рамки постоянное магнитное поле и пропустить через нее ток.
Магнитное поле создается двумя катушками, находящимися в неподвижной части двигателя - статоре. Для обеспечения равномерного вращения применяют несколько рамок, сдвинутых относительно друг друга на некоторый угол, а для увеличения силы Ампера рамки делают из нескольких витков и помещают их на ротор из магнитомягкой стали. Для подведения к рамкам тока их концы соединяют с изолированными друг от друга пластинами из бронзы. К этим пластинам, образующим коллектор (собиратель), с помощью пружин прижимают щетки из графита или бронзы.
На рис. 4.14 изображены статор и ротор электродвигателя постоянного тока. Ротор помещается внутри статора и вращается на подшипниках.
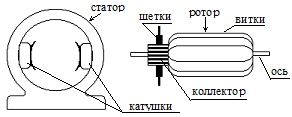
Рис. 4.14 Статор и ротор электродвигателя постоянного тока
На рис. 4.15 приведены основные схемы включения электродвигателя постоянного тока: с параллельным возбуждением (а) и с последовательным возбуждением (б).
(а)
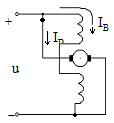
(б)
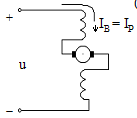
Рис. 4.15 Схемы включения электродвигателя с параллельным (а) и с последовательным (б) возбуждением
В первой схеме ток возбуждения
![]() ,
протекающий через создающие магнитное
поле катушки внутри статора, не зависит
от тока
,
протекающий через создающие магнитное
поле катушки внутри статора, не зависит
от тока![]() , протекающего через витки ротора,
а во второй схеме
, протекающего через витки ротора,
а во второй схеме![]() . Вторая схема включения широко
используется на электротранспорте: в
трамваях, троллейбусах, электричках и
поездах метро, так как в этой схеме при
включении электродвигателя создается
сильный вращательный момент ротора.
. Вторая схема включения широко
используется на электротранспорте: в
трамваях, троллейбусах, электричках и
поездах метро, так как в этой схеме при
включении электродвигателя создается
сильный вращательный момент ротора.
Отметим, что электродвигатели постоянного тока будут работать и от переменного напряжения питания. Действительно, при изменении направления тока в рамке одновременно изменится и направление силовых линий магнитного поля, создаваемого током в катушке возбуждения, поэтому направление силы Ампера не изменится, и ротор будет вращаться в одну сторону. Вследствие этого описанные двигатели часто называют коллекторными. Для изменения направления вращения ротора в коллекторных электродвигателях необходимо перекоммутировать либо концы катушек возбуждения, либо провода, подводящие ток к щеткам коллектора.
Важными характеристиками электродвигателей постоянного тока в устройствах автоматического управления являются регулировочная характеристика (рис. 4.16.а) и переходная характеристика (рис. 4.16.б). Регулировочная характеристика - это зависимость частоты вращения ротора от напряжения U.
(а)
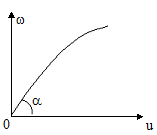
(б)
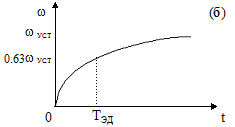
Рис. 4.16 Регулировочная (а) и переходная (б) характеристики электродвигателей
Переходной характеристикой называется
зависимость частоты вращения ротора
![]() от времени t при подключении электродвигателя
к напряжению u=const. Она описывается
выражением
от времени t при подключении электродвигателя
к напряжению u=const. Она описывается
выражением![]() .
.
Передаточная функция электродвигателя
по частоте вращения ротора соответствует
инерционному звену
![]() ,
,![]()
![]() (4.10)
(4.10)![]() где
где![]() ,
угол
,
угол![]() определяется по регулировочной
характеристике.
определяется по регулировочной
характеристике.
![]() - постоянная времени, которая определяется
по переходной характеристике:
- постоянная времени, которая определяется
по переходной характеристике:
![]() при
при![]() .
.
Передаточную функцию электродвигателя
по углу поворота ротора
![]() получим, принимая во внимание, что
получим, принимая во внимание, что![]() .
.
Отсюда
![]() , тогда с учетом (4.10) :
, тогда с учетом (4.10) :![]() .
(4.11)
.
(4.11)
Из этого выражения следует, что для выходного сигнала, являющегося углом поворота ротора, электродвигатель является инерционно-интегрирующим звеном.
Недостатком коллекторных электродвигателей является наличие трущихся о коллектор щеток. При вращении ротора щетки искрят, вследствие чего они создают помехи радиоаппаратуре и со временем стираются (изнашиваются), поэтому их приходится периодически менять.