

40. Взаимодействие управляющей эвм и объекта управления через программу-диспетчер.
Для синхронизации работы программ и организации обмена данными между блоками САУ используется управляющая программа, называемая диспетчером. В этой программе реализуется алгоритм очередности выполнения разных программ по приоритетам, вплоть до прерывания выполнения текущей программы.
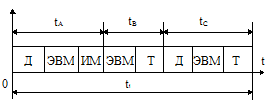
На рис.9.2 приведены временные диаграммы работы САУ при последовательном выполнении операций (а) и в режиме мультипрограммирования под управлением программы «диспетчер» (б). На этом рисунке показаны отрезки времени работы отдельных блоков САУ:
Т - терминалы (дисплей, пульт и т.д.),
Д - датчики и измерительные контроллеры
ИМ - исполнительные механизмы,.
ЭВМ - работа управляющей ЭВМ.
(а)
(б)
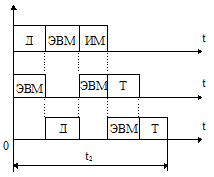
Рис.9.2. Временные диаграммы работы САУ
Из рис.9.2.а видно, что продолжительность
выполнения задачи управления при
последовательном выполнении команд
![]()
t1=tA+tB+tC,
где
![]() - время для передачи данных с датчиков
на ЭВМ и формирования сигналов для
исполнительных механизмов,
- время для передачи данных с датчиков
на ЭВМ и формирования сигналов для
исполнительных механизмов,
![]() - время для передачи данных от ЭВМ к
терминалам,
- время для передачи данных от ЭВМ к
терминалам,
![]() - время для передачи данных с датчиков
к ЭВМ и далее к терминалам.
- время для передачи данных с датчиков
к ЭВМ и далее к терминалам.
На рис.9.2.б время
![]() - это продолжительность выполнения
задачи управления объектом в режиме
мультипрограммирования. Из сравнения
рис.9.2.а и 9.2.б видно, что
- это продолжительность выполнения
задачи управления объектом в режиме
мультипрограммирования. Из сравнения
рис.9.2.а и 9.2.б видно, что![]() ,
т.е. в режиме работы под управлением
программы «диспетчер» время для
управления уменьшается, что очень важно
для работы САУ в реальном масштабе
времени.
,
т.е. в режиме работы под управлением
программы «диспетчер» время для
управления уменьшается, что очень важно
для работы САУ в реальном масштабе
времени.
Экономия времени достигается за счет того, что во втором режиме ЭВМ работает почти непрерывно и выполняет при этом разные программы.
5. Еще одно отличие управляющих ЭВМ от универсальных состоит в разработке программного обеспечения. В управляющих ЭВМ обычно небольшой ресурс памяти для хранения программ поддержки, обеспечивающих простоту разработки и отладки программ их работы.
Для управляющих ЭВМ широко используется кросс-технология, когда программное обеспечение вначале разрабатывается на универсальных ЭВМ, а затем «перекачивается» на управляющие ЭВМ с помощью программы «транслятор». Кросс-технология поддерживается целым комплексом программ, образующих так называемую резидентную систему программ.
41. Состав программного обеспечения управляющих эвм.
ПО управляющих ЭВМ
*Операционные системы
**Программы организациии управления систем
1. Диспетчер
2. Обработчик прерываний
3. Драйвер внешних устройств
4. Программы управления данными
5. Программы управления задачами
6. Программы связи с оператором
7. Начальный загрузчик
**Служебныепрограммы
1. Редактор
2. Обслуживание файлов
3. Библиотекарь
4. Компоновщик
5. Загрузчик
*Резидентные
системы
1. Ассемблер
2. Транслятор
3. Библиотека прикладных программ
4. Программы-отладчики
5. Программы эмуляции и моделирования
42. Общие сведения об алгоритмических языках программирования счпу. Вспомогательные операторы.
Роботы, манипуляторы и станки с числовым программным управлением (ЧПУ) являются частными случаями цифровых систем управления.
Для описания процессов обработки деталей на станках с ЧПУ, для програм-мирования работы роботов - манипуляторов применяются алгоритмические язы-ки специального назначения.
В качестве примера для СЧПУ иностранных разработок можно привести язы-ки APT. MODAPT, FART TURN / MILL, а для СЧПУ отечественных разработок языки ТАУ - Т, СПД - ЧПУ.
Эти языки обеспечивают формально - словесный способ описания процесса обработки.
Написанная на этих языках управляющая программа состоит из последова-тельности операторов и разрабатывается по следующим этапам:
1. На чертеже детали указывается система координат.
2. Каждому геометрическому объекту (точке, прямой, окружности, контуру, поверхности) ставится в соответствии номер.
3. С помощью макрокоманд рассчитываются координаты движения обрабаты-вающих инструментов или других объектов.
4. На основе рассчитанных координат задается последовательность техноло-гических команд обработки.
Последняя процедура обычно программируется совместно с технологами, так как процесс обработки должен удовлетворять определенным требованиям техно-логического процесса.