

17. Асинхронные электродвигатели переменного тока. Принцип действия, устройство, передаточная функция, достоинства, недостатки.
От недостатка коллекторных электродвигателей свободны асинхронные электродвигатели переменного тока. В них нет коллектора и трущихся щеток, поэтому они не искрят и в них ничего не изнашивается.
Принцип работы асинхронных электродвигателей
основан на создании в пространстве
внутри статора вращающегося магнитного
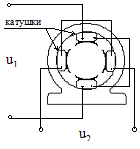
поля. На рис.4.17 изображены статор
двухфазного электродвигателя с двумя
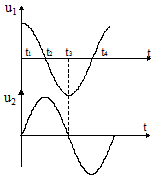
парами катушек (а), переменное напряжение
![]() и переменное напряжение
и переменное напряжение![]() ,
подводимое к первой и второй парам
катушек соответственно (б), а также
направление силовых линий внутри статора
в моменты времени
,
подводимое к первой и второй парам
катушек соответственно (б), а также
направление силовых линий внутри статора
в моменты времени![]() и
и![]() (в).
(в).
(а)
(б)
(в)
![]()
Рис. 4.17 Статор двухфазного асинхронного двигателя (а), питающие напряжения (б) и вектор магнитной индукции внутри статора (в)
В момент времени
![]() во второй паре горизонтально расположенных
катушек тока нет, так как
во второй паре горизонтально расположенных
катушек тока нет, так как![]() .
В это время
.
В это время![]() ,
поэтому вектор магнитной индукции
,
поэтому вектор магнитной индукции![]() направлен
вертикально вверх.
направлен
вертикально вверх.
В момент времени t2в первой паре
вертикально расположенных катушек тока
нет, так как![]() .
В это время
.
В это время![]() ,
поэтому вектор
,
поэтому вектор![]() направлен
горизонтально слева направо.
направлен
горизонтально слева направо.
В момент времени
![]() имеем:
имеем:![]() ,
,![]() ,
поэтому вектор
,
поэтому вектор![]() направлен
сверху вниз.
направлен
сверху вниз.
В момент времени
![]() имеем:
имеем:![]() ,
,![]() ,
поэтому вектор
,
поэтому вектор![]() направлен горизонтально справа налево.
направлен горизонтально справа налево.
Из рис. 4.17.в видно, что вектор магнитного
поля внутри статора вращается по часовой
стрелке с частотой
![]() питающих напряжений
питающих напряжений![]() и
и![]() .
.
Если поместить внутри статора замкнутый
проводник в виде прямоугольной рамки,
то в соответствии с правилом Ленца эта
рамка будет вращаться за магнитным
полем. Но из-за трения в подшипниках и
возможной нагрузки на оси рамки частота
ее вращения будет меньше, чем частота
вращения поля
![]() .
Поэтому двигатели этого типа называются
асинхронными. Ротор асинхронных
двигателей отличается от ротора
коллекторных двигателей тем, что у него
нет коллектора, а витки замкнуты, т.е.
конец витка соединен с его началом.
.
Поэтому двигатели этого типа называются
асинхронными. Ротор асинхронных
двигателей отличается от ротора
коллекторных двигателей тем, что у него
нет коллектора, а витки замкнуты, т.е.
конец витка соединен с его началом.
Часто ротор выполняется в виде так называемого беличьего колеса, когда вместо витков медной проволоки в пазы ротора заливают расплавленный алюминий, а концы этих заливок соединяют общим алюминиевым кольцом. Такой ротор легко изготавливается и не выходит из строя при перегрузках электродвигателя.
В промышленных установках чаще
используются трехфазные асинхронные
двигатели. К этим двигателям подводится
три переменных напряжения
![]() ,
,![]() ,
,![]() ,
фазовый сдвиг между которыми равен
,
фазовый сдвиг между которыми равен![]() .
.
18. Шаговые двигатели. Принцип действия, устройство, область применения.
В шаговом электродвигателе ротор
поворачивается на определенный угол
при подаче на него очередного импульса
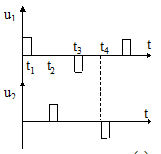
напряжения. На рис. 4.18 изображены статор
(а), импульсы питающих напряжений
![]() и
и![]() шагового электродвигателя (б) и вектор
магнитного поля внутри статора (в).
шагового электродвигателя (б) и вектор
магнитного поля внутри статора (в).
Внутри статора расположен ротор в виде
постоянного магнита с двумя полюсами.
Разноименные полюса притягиваются, а
одноименные полюса отталкиваются друг
от друга, поэтому при появлении импульса
в момент времени
![]() магнит ротора примет вертикальное
положение, причем южный полюс ротора S
будет вверху, а северный N внизу. В момент
времени
магнит ротора примет вертикальное
положение, причем южный полюс ротора S
будет вверху, а северный N внизу. В момент
времени![]() ротор повернется на угол
ротор повернется на угол![]() по часовой стрелке, в момент времени
по часовой стрелке, в момент времени![]() повернется еще на
повернется еще на![]() и
т.д. Для уменьшения шага угла поворота
используют шестеренчатые передачи.
Шаговые двигатели применяются в
электромеханических часах, в
графопостроителях, в матричных принтерах,
в станках с ЧПУ, в роботах и т.д.
и
т.д. Для уменьшения шага угла поворота
используют шестеренчатые передачи.
Шаговые двигатели применяются в
электромеханических часах, в
графопостроителях, в матричных принтерах,
в станках с ЧПУ, в роботах и т.д.
(а)

(б)
(в)
![]()
Рис. 4.18 Статор шагового двигателя (а), питающие напряжения (б) и вектор (в)