

Логарифмические ачх и фчх
Логарифмическая АЧХ (ЛАЧХ) определяется
выражением
![]()
При этом по оси абсцисс в линейном
масштабе откладывается не частота ,
а логарифм частоты. Чаще всего используются
логарифмы по основанию 2,![]() или по основанию 10,
или по основанию 10,![]() .
В первом случае шкала называется
октавной, а во втором случае декадной.
.
В первом случае шкала называется
октавной, а во втором случае декадной.
Логарифмическая ФЧХ (ЛФЧХ) строится
так: по оси ординат откладывается
значение
![]() ,
а по оси абсцисс в линейном масштабе
откладывается логарифм частот
,
а по оси абсцисс в линейном масштабе
откладывается логарифм частот![]() или
или![]() .
.
Для упрощения построения ЛАЧХ часто используется приближенная кусочно-линейная аппроксимация.
Поясним это на примере:
![]()
Тогда
![]()
Кусочно-линейная аппроксимация ЛАЧХ строится по выражениям:

где
![]() - частота сопряжения, на которой
выполняется условие
- частота сопряжения, на которой
выполняется условие![]() .
На частотах
.
На частотах![]() .
величина
.
величина![]() ,
поэтому под корнем пренебрегают слагаемым
,
поэтому под корнем пренебрегают слагаемым![]() .
.
На частотах
![]() величина
величина![]() ,
поэтому под корнем пренебрегают единицей.
,
поэтому под корнем пренебрегают единицей.
На рис.3.5 приведены ЛАЧХ и ЛФЧХ инерционного
устройства. Так как по шкале абсцисс в
линейном масштабе откладывается
![]() ,
поэтому аппроксимация ЛАЧХ получается
кусочно-линейной с наклоном -20 децибелл
на декаду.
,
поэтому аппроксимация ЛАЧХ получается
кусочно-линейной с наклоном -20 децибелл
на декаду.
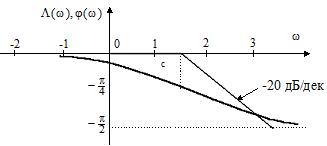
Рис.3.5 ЛАЧХ и ЛФЧХ инерционного устройства
10. Переходная и импульсная характеристики сау. Определения, связь с передаточной функцией, примеры. Переходная характеристика
Из уравнения
![]() следует, что
следует, что![]() .
(3.1) откуда
.
(3.1) откуда![]() (3.2)
(3.2)
По этому выражению можно найти выходной сигнал системы при любых входных сигналах x(t), для которых существует прямое преобразование ЛапласаX(p).
Однако на практике часто в качестве
входных сигналов используют такие,
которые просто описываются математически
и позволяют исследовать различные
характеристики САУ. Одним из таких
испытательных сигналов является
единичный скачок, описываемый выражением
![]()
Преобразование Лапласа от единичного
скачка
![]() .
(3.3)
.
(3.3)
Переходной характеристикой h(t) системы называется сигнал на ее выходе при воздействии на ее входе единичного скачка при нулевых начальных условиях. Под нулевыми условиями понимается состояние покоя.
Математически переходная характеристика
определяется по выражению, следующему
из (3.2) с учетом (3.3)
![]() .
(3.4)
.
(3.4)
Передаточная функция инерционного
устройства
![]() .
Этой функции соответствует дифференциальное
уравнение
.
Этой функции соответствует дифференциальное
уравнение![]() .
.
Переходная характеристика инерционного устройства описывается выражением (см. табл.2.1)
![]() ,
где
,
где
![]() ,T- постоянная времени
инерционного устройства.
,T- постоянная времени
инерционного устройства.
На рис.3.1 изображены единичный скачок
1(t) и переходная характеристика![]() .
.
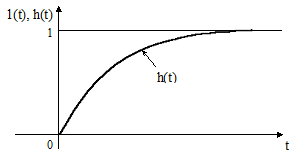
Рис.3.1 Единичный скачок и переходная характеристика инерционного устройства
Импульсная характеристика
Другим широко используемым сигналом
является единичный импульс, предложенный
математиком Дираком. Он описывается
выражением
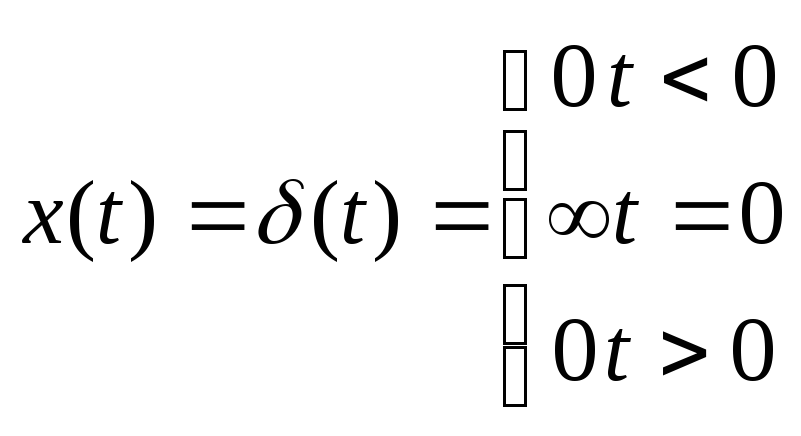 , причем
, причем![]() .
.
Последнее условие свидетельствует о
том, что площадь импульса Дирака равна
единице. Единичный импульс есть предел
прямоугольного импульса шириной
![]() и высотой
и высотой![]() при
при![]() .
Единичный импульс называют также
дельта-функцией.
.
Единичный импульс называют также
дельта-функцией.
Имеет место замечательное фильтрующее
во времени свойство единичного импульса
![]() .
.
Это свойство гласит так: свертка любой функции с единичным импульсом равна значению функции в момент действия этого импульса.
Преобразование Лапласа от единичного
импульса найдем, используя его фильтрующее
свойство:
![]() .
(3.5)
.
(3.5)
Импульсной характеристикой w(t) системы называется сигнал на ее выходе при воздействии на ее входе единичного импульса при нулевых начальных условиях.
Математически импульсная характеристика определяется по выражению, следующему из (3.2) с учетом (3.5)
![]() .
(3.6)
.
(3.6)
Из этого выражения следует правило: импульсная характеристика системы есть обратное преобразование Лапласа от ее передаточной функции.
Для инерционного устройства
![]() ,
где
,
где![]() .
.
Тогда из табл.2.1 имеем:
![]()
График этой импульсной характеристики приведен на рис.3.2
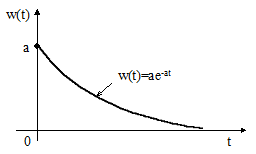
Рис.3.2 Импульсная характеристика инерционного устройства
Определим связь между импульсной и переходной характеристикой. Из (3.4) следует, что прямое преобразование Лапласа от переходной характеристики
![]() откудаW(p)
=pH(p).
откудаW(p)
=pH(p).
Возьмем обратное преобразование от левой и правой частей этого уравнения и получим
w(t) =ph(t),
где
![]() - символ дифференцирования.
- символ дифференцирования.
Таким образом, импульсная характеристика есть производная по времени от переходной характеристики.