

Московский государственный университет
путей сообщения
РОАТ
Шуваев В.В.
АВТОМАТИЧЕСКИЕ СИСТЕМЫ УПРАВЛЕНИЯ
для студентов Vкурса
специальности
180700 Электрический транспорт
(ЖЕЛЕЗНОДОРОЖНЫЙ ТРАНСПОРТ) (ЭПС)
Воронеж 2013
СОДЕРЖАНИЕ
1. СНОВНЫЕ ПОНЯТИЯ ……………………………………………………………….. 3
1.1. Общие сведения ………………………………………………………………….. 3
1.2. Принципы автоматического управления ……………………………………….. 5
1.2.1. Принцип управления по отклонению ………………………………………… 5
1.2.2. Принцип управления по возмущению ……………………………………….. 5
1.2.3. Принцип комбинированного управления ……………………………………. 6
1.2.4. Принцип адаптации …………………………………………………………… 6
1.3. Структура системы автоматического управления …………………………….. 6
1.4. Классификация систем автоматического управления ………………………… 7
2. МАТЕМАТИЧЕСКОЕ ОПИСАНИЕ ЛИНЕЙНЫХ САУ ………………………… 8
2.1. Уравнения звеньев системы ……………………………………………………. 8
2.2. Основные характеристики звеньев и систем ………………………………….. 9
2.3. Типовые звенья САУ и их характеристики …………………………………….. 12
2.4. Передаточные функции и характеристики разомкнутых систем …………….. 20
3. УСТОЙЧИВОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ………… 23
3.1. Понятие устойчивости линеаризованных систем …………………………….. 23
3.2. Алгебраические критерии устойчивости ………………………………………. 23
3.3. Частотные критерии устойчивости …………………………………………….. 25
3.3.1. Критерий устойчивости Михайлова ………………………………………….. 25
3.3.2. Критерий устойчивости Найквиста …………………………………………… 25
4. КОРРЕКТИРУЮЩИЕ УСТРОЙСТВА ……………………………………………… 27
4.1. Понятие о коррекции …………………………………………………………….. 27
4.2. Корректирующие устройства и их характеристики …………………………… 28
4.2.1. Последовательные корректирующие устройства ……………………………. 28
4.2.2. Параллельные корректирующие устройства ………………………………… 30
СПИСОК ЛИТЕРАТУРЫ ………………………………………………………………. 33
1. СНОВНЫЕ ПОНЯТИЯ
1.1. Общие сведения
Для осуществления различных технологических и производственных процессов необходимо, чтобы величины, которые характеризуют эти процессы, удовлетворяли определенным условиям. Например, движение поезда должно осуществляться так, чтобы он мог остановиться перед препятствием, которым является находящийся впереди подвижной состав или неисправный участок пути.
Создание условий, обеспечивающих требуемое протекание процесса, называется управлением.
Комплекс машин и аппаратов, в которых протекает процесс, подлежащий управлению, называется объектом управления (ОУ).
Чтобы лучше понять процесс управления, рассмотрим управление поездом. Видя перед собой участок пути с определенным профилем, показания путевого и локомотивного светофоров, а, также зная фактическое и требуемое по графику движения местоположение поезда, машинист определяет с какой скоростью вести поезд.
Рассматривая этот пример, мы можем выделить в процессе управления следующие элементы: получение информации о маршруте движения, т.е. о цели (задаче) управления, получение информации о показаниях светофоров и о положении поезда, т.е. о результатах управления; анализ полученной информации и принятие решения о требуемых управляющих воздействиях; исполнение принятого решения.
Этот пример показывает, что в общем случае процесс управления состоит из получения информации о цели управления, о результатах управления (поведении управляемого объекта), анализа полученной информации, выработки решения и исполнения принятого решения.
Таким образом, для осуществления процесса управления необходимо иметь источники информации о целях и результатах управления, устройство анализа информации и принятия решения, устройство, реализующее принятое решение (исполнительное устройство).
В рассмотренном примере объектом управления является процесс движения поездом. Все элементы процесса управления осуществляет человек; такое управление называют ручным.
Если реализация всех элементов процесса управления осуществляется специально созданным техническим устройством, без непосредственного участия человека, то такое управление называется автоматическим, а само устройство называется автоматически управляющим устройством (АУУ).
Если управление осуществляется совместными действиями технических средств и человека, то такое управление называется автоматизированным. В этом случае технические устройства решают простые задачи управления, и снабжают информацией человека, который решает более сложные задачи управления.
Управление в простейших системах часто называют регулированием.
Автоматическим регулированием называется поддержание постоянной или изменяющейся по заданному закону одной величины, характеризующей процесс.
Автоматическим управлением называется автоматическое осуществление совокупности воздействий, выбранных из множества возможных на основании определенной информации и направленных на поддержание или улучшение функционирования управляемого объекта в соответствии с целью управления.
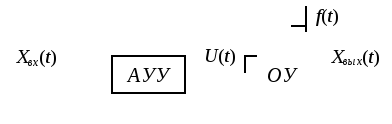
В схеме системы автоматического управления (рис. 1): ОУ - объект управления, АУУ - автоматическое управляющее устройство.
Совокупность объекта управления и управляющего устройства называется системой автоматического управления (регулирования) (САУ).
Л
Рисунок
1. Структурная схема САУ
Объектом управления может быть электрическая машина, поезд, технологический процесс движения поездов на участке железной дороги и т.д. В системах управления часто объектами управления являются системы автоматического регулирования.
Состояние объекта или системы характеризуется совокупностью переменных величин - параметров состояния. Перемененные, характеризующие состояние объекта управления называются управляемыми переменными, или выходными переменными, или выходом Хвых(t).
Величины, характеризующие внешнее влияние на объект, называются воздействиями или входными сигналами (вход) Хвх(t).
Воздействия на объект, вырабатываемые управляющим устройством, называют управляющими воздействиями U(t).
Внешнее воздействие, определяющее требуемый закон изменения управляемой величины, называется задающим воздействием. Это воздействие поступает от специального задающего устройства.
Воздействие на объект, не зависящее от системы управления, называют возмущающим воздействием или возмущением f(t). Различают два вида возмущающих воздействий - нагрузку и помеху.
Нагрузкой является внешнее воздействие, приложенное к управляемому объекту, не зависящее от управляющего устройства и являющееся причиной изменения режима работы объекта.
Помехи – это внешние воздействия на отдельные элементы управляющего устройства или объекта управления, не содержащие информации, необходимой для управления. Помехами являются ошибки измерительных приборов, шум и другие. Реальные сигналы в системе управления – смесь полезного сигнала и помехи.
Правило, в соответствии с которым управляющее устройство формирует управляющее воздействие U(t), называют законом или алгоритмом управления. В общем случае:
![]()
Каждый объект управления можно рассматривать в условиях статики и динамики. В условиях статики параметры Хвых и Хвых являются постоянными величинами. При изучении динамики объекта исследуют зависимость параметров от времени, т.е. Хвых(t) и Хвых(t).
Параметры объекта могут быть сосредоточенными (постоянными) и распределенными (переменными). Для описания системы в первом случае используют обыкновенные дифференциальные уравнения, во втором - дифференциальные уравнения в частных производных.
Если объект описывается системой линейных дифференциальных уравнений, то САУ называется линейной. При описании объекта системой нелинейных дифференциальных уравнений САУ называется нелинейной.
САУ может быть устойчивой, неустойчивой и нейтральной. САУ устойчива, если после кратковременного внешнего воздействия она с течением времени возвращается в исходное состояние или состояние близкое к нему. Если после окончания воздействия отклонение от начальной управляемой координаты продолжает возрастать, то САУ является неустойчивой.
Нейтральными САУ являются такие системы, в которых по окончании воздействия устанавливается новое состояние равновесия, которое зависит от произведенного воздействия.