

2.2. Эквивалентная механическая система привода
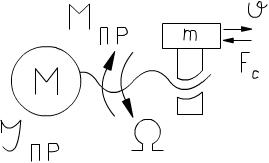
Эквивалентная МС привода состоит из сосредоточенных вращающихся или перемещающихся множества масс и соединяющих их упругих элементов, обладающих жесткостью, но лишенных массы. В простейшей линейной модели учитывается только вязкое трение, при этом момент трения пропорционален угловой скорости. Эквивалентная МС обладает таким же запасом энергии, что и реальная.
Приведение моментов сопротивления

Исходя из энергетического баланса системы, с учетом потерь в промежуточных передачах, определяемых КПД передач – η
![]() ,
,
откуда
![]()
где i - передаточное отношение между валом двигателя и валом, к которому приложен момент сопротивления МС.
При наличии нескольких передач, между двигателем и механизмом с передаточными числами i1, i2, i3, . . . in и соответствующими КПД, ηП1, ηП2, ηП3, . . . ηПn момент сопротивления, приведенный к валу двигателя, определяется по формуле:
![]()
Приведение сил сопротивления
Производится аналогично приведению моментов. Если скорость поступательного движения V м/с, а угловая скорость двигателя Ω, рад/с, то
![]()
где FC – сила сопротивления механизма, Н.
отсюда приведенный
момент:
![]()
Приведение моментов инерции
Проводят исходя из сохранения механической энергии при переносе моментов инерции на вал двигателя
![]() откуда
откуда
![]()
При наличии нескольких вращающихся частей с моментами инерции J1 J2 . . . Jn и угловыми скоростями Ω1 Ω2 . . . Ωn
![]()
Общий момент инерции на валу двигателя равен сумме моментов инерции якоря и ротора двигателя и приведенного момента инерции
![]() .
.
В каталогах приводят значение махового момента GD2 , тогда момент инерции двигателя в системе СИ
![]()
Для поступательно движущийся массы
![]()
ЛЕКЦИЯ 2
-
Механические характеристики производственных механизмов и электрических двигателей
-
Установившиеся режимы
Зависимость между приведенным к валу двигателя скоростью и моментом сопротивления механизма Ω = f(МПР) называется механической характеристикой производственного механизма.
Механической характеристикой двигателя называется зависимость его угловой скорости от вращающего момента, Ω = f(М).
Жесткость механической характеристики электропривода – отношение разности электромагнитных моментов, развиваемых электродвигателем, к соответствующей разности угловых скоростей электропривода:
![]()
Обычно на рабочих
участках механические характеристики
двигателей имеют отрицательную жесткость
β < 0. Для линейных механических
характеристик β = const,
для нелинейных
![]() .
.
Рассматриваются 4 категории жесткости механической характеристики электродвигателей:
-
Абсолютно жесткая механическая характеристика (β = ∞) (синхронный двигатель).
-
Жесткая механическая характеристика скорость изменяется незначительно при изменении момента (двигатель постоянного тока независимого возбуждения, асинхронные двигатели в пределах рабочей части механической характеристики).
-
Мягкая механическая характеристика скорость значительно меняется при изменении момента (двигатели постоянного тока последовательного возбуждения).
-
Абсолютно мягкая механическая характеристика (β = 0) (двигатели постоянного тока независимого возбуждения при питании их от источника тока или при работе в замкнутых системах электропривода в режиме стабилизации тока якоря).
В установившемся режиме имеет место баланс электромагнитного момента на валу двигателя и приведенного момента сопротивления
М = МПР
Работу привода в установившемся режиме характеризует статическая устойчивость: состояние установившегося режима, когда при случайном отклонении скорости от установившегося значения привод возвратится к тому же установившемуся режиму.
Привод статически устойчив, если в установившемся режиме выполняется условие
![]() ,
,
![]() ,
,
т.е. жесткость механической характеристики должна быть больше жесткости механической характеристики электродвигателя.