

ЭП_ЛЕКЦИЯ_3
.docЛЕКЦИЯ 3
РАЗОМКНУТЫЕ СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРИЧЕСКИМИ ПРИВОДАМИ
Для управления электрическими приводами применяются различные аппараты:
контакторы, автоматы, реле, регуляторы, бесконтактные логические элементы, вспомогательные электрические машины и аппараты.
-
Схемы управления пуском двигателя постоянного тока
Ток якоря ЭД определяется разностью между приложенным напряжением и ЭДС вращения
![]()
В момент пуска скорость вращения двигателя Ω = 0, по этому Е = с Ω = 0. Тогда пусковой ток якоря
![]()
Сопротивление якоря двигателя мало поэтому пусковой ток значительно превышает (во много раз) номинальный ток якоря.
![]() .
.
Это не допустимо. Для уменьшения пускового тока при пуске от не регулируемого источника напряжения в цепи якоря двигателя включают пусковой резистор RП,
тогда
![]()
При пуске скорость ЭД увеличивается, ЭДС возрастает, ток якоря уменьшается. Пропорционально этому уменьшается момент двигателя и темп разгона снижается. Для сохранения необходимого тока и момента при пуске, сопротивление пускового резистора постепенно уменьшают. В конце пуска, пусковой резистор должен быть полностью выключен из цепи якоря. Автоматическое управление пуском осуществляется в функции скорости двигателя (ЭДС), в функции тока якоря, в функции времени.
-
Управление в функции угловой скорости
Требуется контроль скорости вращения якоря двигателя. Непосредственное измерение скорости применяется редко из-за относительной сложности конструкции и небольшой надежности в работе. Часто угловая скорость фиксируется косвенным путем – измерением других параметров однозначно связанных с угловой скоростью. Для двигателей постоянного тока таким параметром является ЭДС двигателя, а для синхронных и асинхронных двигателей с фазным ротором, кроме того, частота тока в роторе и значение ЭДС ротора.
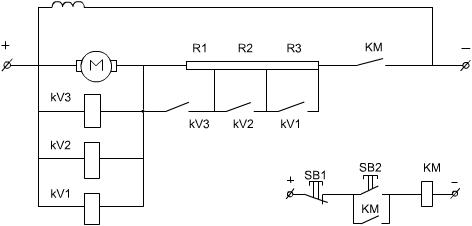
Контакторы KV1 KV2 KV3 настроены на определенное значение напряжения.
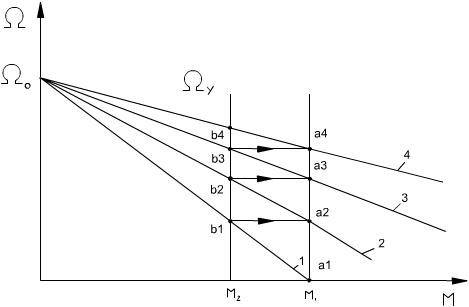
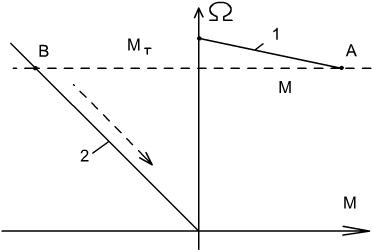
Механическая характеристика пуска.

![]()
![]()
![]()
Эти напряжения мало чем отличаются друг от друга, т.е.
![]()
![]()
![]()
-
Управление в функции тока
При пуске, по мере увеличения угловой скорости пусковой ток уменьшается. В момент снижения пускового тока якоря до определенного значения часть пускового резистора шунтируется, что приводит к новому увеличению тока I1
Ток переключения выбирают исходя из необходимости обеспечить требуемое минимальное ускорение при пуске двигателя с заданной нагрузкой, поэтому ток переключения должен быть выше тока, определяемого моментом сопротивления.
-
Управление в функции времени
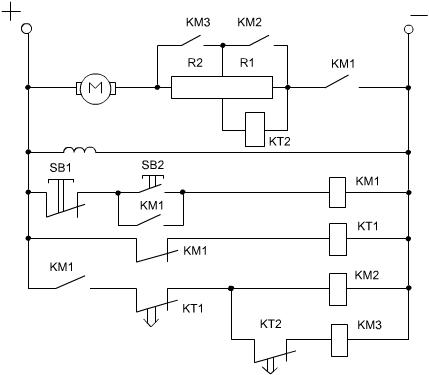

-
СХЕМЫ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЭД ПОСТОЯННОГО ТОКА
Используются режимы динамического торможения и противовключени я. Рекуперативное торможение используется в регулируемом электроприводе.
-
Динамическое торможение
Принцип динамического торможения заключается в том, что якорь электродвигателя отключается от сети (U=0) и замыкается на тормозной резистор RT .
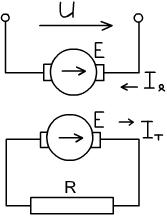
Якорь электродвигателя продолжает по инерции вращаться и под действием ЭДС в цепи якоря протекает ток, направление которого противоположно току в двигательном режиме.
![]() <
0
<
0
Этот ток создает момент МТ
![]() <
0
<
0
под действием которого происходит интенсивное торможение электродвигателя. Из уравнения механической характеристики ЭД постоянного тока:
![]()
в которой U=0 получим
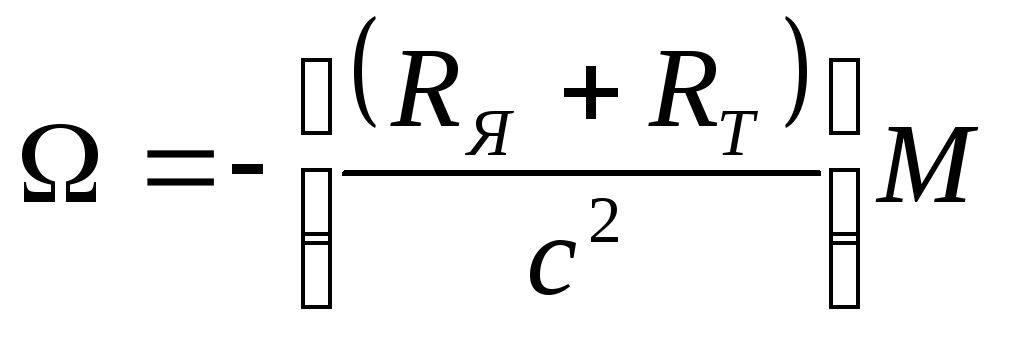
![]()
Это уравнение тормозной характеристики привода.
Для определения величины тормозного сопротивлении должна быть известна скорость с которой производиться торможение и допустимое значение тока якоря в начале торможения Iт
![]()
В случае если торможение производиться с номинальной скоростью
Откуда
![]()
Т.к. момент двигателя при динамическом торможении прямо пропорционален скорости, эффективность торможения резко уменьшается по мере снижения угловой скорости двигателя. Поэтому для уменьшения времени торможения применяют две или три ступени торможения, увеличивая тормозной ток путем шунтирования тормозного резистора по мере увеличения угловой скорости.
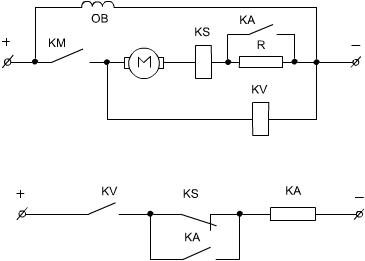
Динамическое торможение в функции времени:

Динамическое торможение в функции скорости (ЭДС):
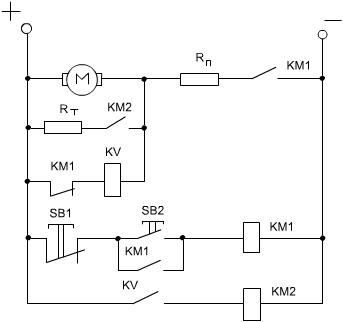
KV – реле контроля скорости включенное на напряжение якоря двигателя, которое при динамическом торможении пропорционально скорости:
![]()
-
Торможение противовключением
Применяется в случаях реверсивных приводов, где вслед за торможением производится пуск двигателя в противоположном направлении. При противовключении двигателя его ЭДС, действует согласно с напряжением сети в результате чего ток двигателя сильно возрастает
![]()
Для ограничения тока при противовключении приходиться вводить в силовые цепи, кроме силовых резисторов еще добавочный резистор (ступень противовключения)