

ЛЕКЦИЯ 1
-
Основные определения и классификация электроприводов
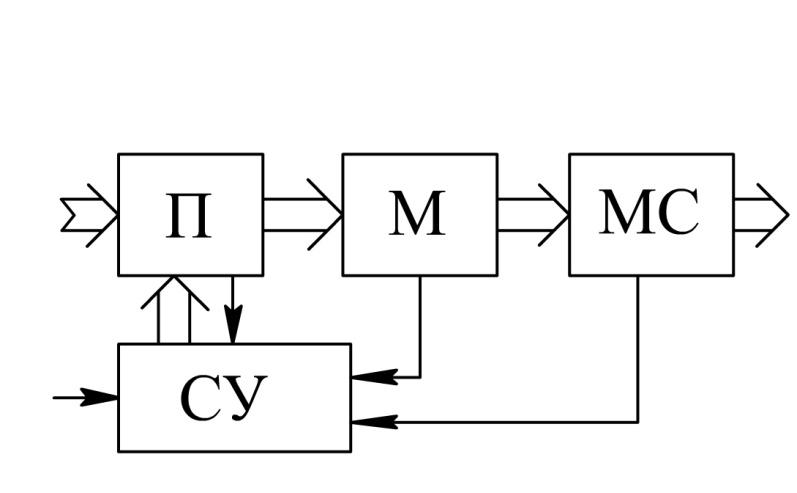
Автоматизированный электропривод – электромеханическая система; состоящая из электрического (силового) преобразователя, электродвигателя, механической системы и системы управления.
Классификацию АЭ проводят по нескольким признакам:
-
По способу распределения механической энергии:
-
Групповой электропривод: обеспечивает движение исполнительных органов нескольких рабочих машин. Передача механической энергии осуществляется с помощью одной или нескольких трансмиссий. Такой групповой привод называют трансмиссионным. Существуют групповые электроприводы распределяющие механическую энергию внутри машины между несколькими рабочими органами.

-
Индивидуальный: привод в котором каждый рабочий орган машины приводиться в движение самостоятельным электроприводом.
-
Взаимосвязанный: электропривод содержит два или несколько электрически или механически связанных между собой электродвигателя, при работе которых поддерживается соотношение или равенство скоростей или нагрузок или положение исполнительных органов машины. Разновидностью взаимосвязанного электропривода является многодвигательный.
-
Многодвигательный электропривод: представляющий собой электропривод, двигатели которого совместно работают на общий вал. В случаях, когда необходимо поддержание постоянного соотношения скоростей рабочих органов, не имеющих механических связей или когда осуществление этих связей затруднено, используется специальная схема электрических связей двух или нескольких электродвигателей, называется схемой электрического вала.
-
По степени управляемости электропривод может быть:
-
Нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода меняются под воздействием возмущений.
-
Регулируемый – Для сообщения измеряемой или не измеряемой скорости исполнительному органу, параметры привода изменяются под воздействием управляющего устройства.
-
Программно – управляемый привод управляемый в соответствии с заданной программой.
-
Следящий - автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с заданным сигналом, изменяемая по произвольному закону.
-
Адаптивный – автоматический избирающий структуры или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
-
По уровню автоматизации:
-
Неавтоматизированный: электропривод с ручным управлением
-
Автоматизированный: электропривод управляемый автоматическим регулированием параметров
-
Автоматический: в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
-
По роду тока
-
Электропривод постоянного тока
-
Электропривод переменного тока
-
По виду электрического двигателя:
-
Электропривод с двигателем постоянного тока
-
Электропривод с асинхронным двигателем (асинхронный электропривод)
-
Электропривод с синхронным двигателем (синхронный электропривод)
-
По виду силового преобразовательного устройства:
-
Электропривод с электромашинным преобразователем
-
Электропривод с полупроводниковым преобразователем
-
МЕХАНИКА ЭЛЕКТРОПРИВОДА
2.1. Моменты и силы, действующие в механической системе привода
Механическая часть электропривода представляет собой сложную кинематическую цепь с большим числом движущихся элементов. Каждый из этих элементов реальной кинематической цепи обладает упругостью т.е. деформируется под нагрузкой, а в соединениях элементов имеются воздушные зазоры. С учетом этих факторов расчетная схема механической части привода будет представлена многомассовой механической системой с упругими связями и зазорами.
Учитывая, что основные закономерности движения таких систем определяются наибольшими массами и зазорами и наименьшими жесткостями связей системы, можно свести расчетную схему механической части привода либо к трехмассовой, либо к двухмассовой механической системе с эквивалентными упругими связями и с суммарным зазором (или без него), приведенным к угловой скорости вала двигателя. Но и эти расчетные схемы используются тогда, когда пренебрежение упругостью и зазором приведет к ошибкам расчета (прецизионные следящие системы, механизмы с гибкими связями, длинными валами, канатами).
В большинстве практических случаев можно пренебречь зазорами и упругостью, приняв механические связи абсолютно жесткими.
При этом допущении движение одного элемента дает полную информацию о движении всех остальных элементов, поэтому движение электропривода можно рассматривать на каком либо одном механическом элементе. Обычно в качестве такого элемента принимают вал двигателя.
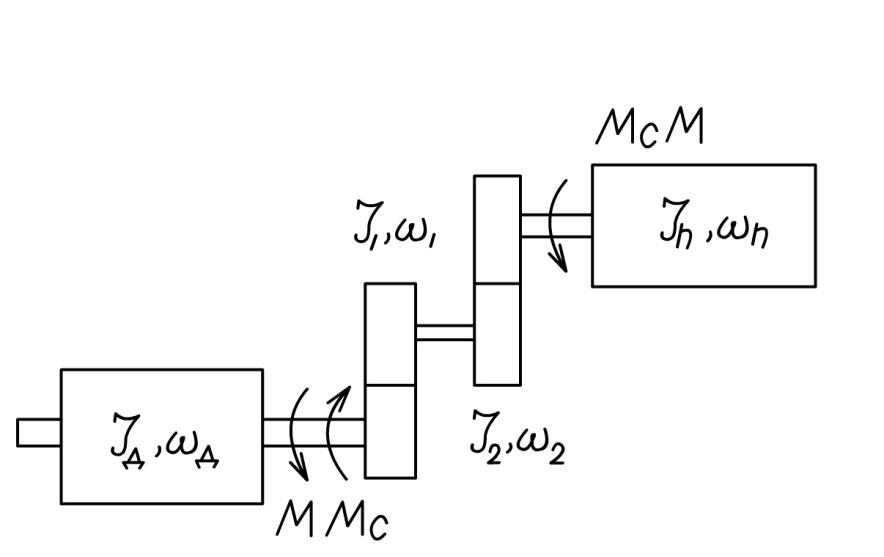
Кинематическая схема связей двигателя с исполнительным механизмом.
Расчетная схема сводится к одному обобщенному жесткому механическому звену, имеющему эквивалентную массу с моментом инерции J, на которую воздействует электромагнитный момент двигателя М и суммарный приведенный к валу двигателя момент сопротивления (статический момент) МС, включающий все механические потери в системе, в том числе механические потери двигателя. Момент сопротивления механизма МСМ состоит из двух слагаемых; соответствующих полезной работе и работе трения. Моменты приложенные к механической системе со стороны двигателя, называются движущими, а со стороны нагрузки – моментами сопротивления. Моменты сопротивления разделяют на активные и реактивные.
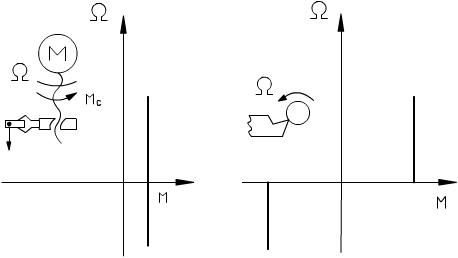
Активные – обусловлены воздействием на электромеханическую систему привода внешних сил (например, сила тяжести). Эти моменты не зависят от направления движения и, как правило, не зависят от скорости. Активный момент сохраняет свой знак при изменении направления вращения привода.
Реактивные – возникает как реакция на движение исполнительного органа привода. Они обусловлены силами трения и технологическими условиями (например, силами резания)
Реактивные моменты всегда действуют противоположно движению, реактивные моменты меняют знак.
Реактивные моменты сопротивления, связаны с технологическим процессом и представляют собой нелинейную функцию скорости
![]() ,
,
но в АЭ считают, что технологическое усилие постоянно, а следовательно МС= const. Реактивные моменты могут быть вызваны вязким или сухим трением в механической системе привода.
Моменты вязкого трения пропорциональны скорости
![]() ,
,
где β – коэффициент пропорциональности, зависящий от конструкции механической системы.
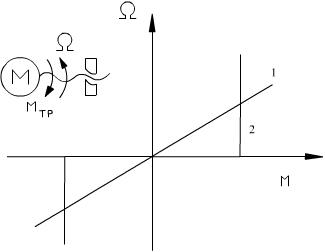
Момент сухого рения постоянен (не зависит от скорости) и меняет знак при изменении направления вращения.
![]()