

матан Бесов - весь 2012
.pdfD γ1
D Γ1 = F(γ1) F(D)
γ1 γ2
γ1
D ! "
#Γ2 = F(γ2)$%
v |
y |
|
y |
|
|
γ2 |
|
Γ2 |
Γ1 |
Γ2 |
|
|
|
|
|||
|
γ1 |
|
|
Γ1 |
|
|
|
|
|
|
|
O |
u O |
J > 0 |
x O |
J < 0 |
x |
|
|
|
|
& '( ) *
+ , -
! ! !
"
D D!
"
!
|
|
. , |
- / |
0 |
|
|
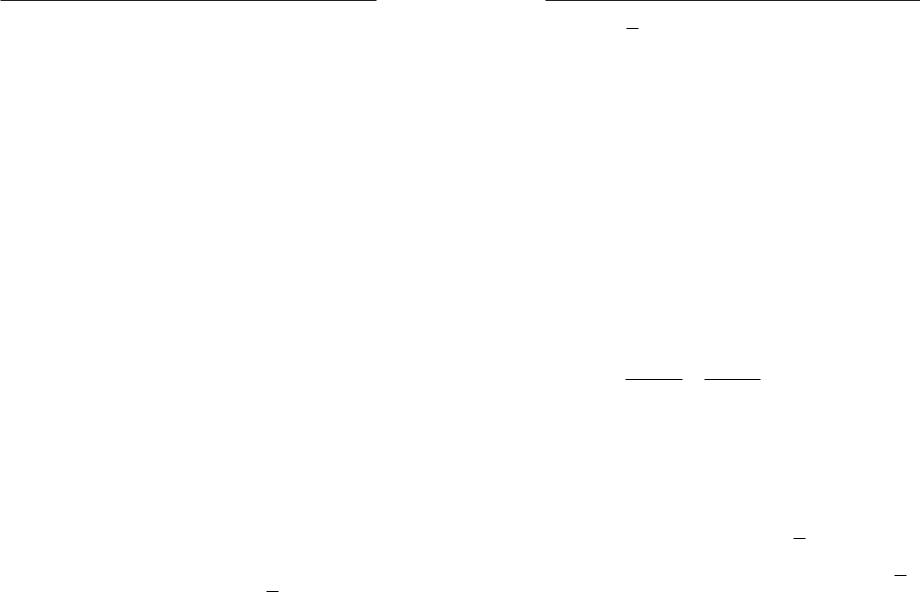
x = x(u, v), |
|
F : |
y = y(u, v)
1 --
" G Ouv
§
0 ! D D G
|
|
∂(x, y) |
= 0 |
|
|
|
|
|
J(u, v) |
|
|
||||
|
D. |
||||||
|
|
||||||
|
|
∂(u, v) |
|
|
|
|
|
+ ! |
J(u, v) , |
|
D |
||||
" G |
|||||||
G # |
2( 3 )$ |
|
D F(D) |
||||
" ! Oxy #
2' * )$
0 Γ ∂D !
+ !
ΓF(Γ) = F(∂D) = ∂D
#!
" 1◦ 24 ) '$ "
!
Γi = {(u(t), v(t)) : ai−1 t ai}
1 ! %ki=1 Γi = Γ + !
Γi F(Γi) = {(x(u(t), v(t)), y(u(t), v(t))), ai−1 t ai}
|
-- |
|||||||||||||||||||||||||||||
|
-- " - |
5 |
||||||||||||||||||||||||||||
! |
dx |
|
|
|
du |
|
|
|
|
|
|
|
|
x |
|
|
|
|
||||||||||||
|
|
|
|
xu |
+ xv |
dv |
|
x |
|
du |
|
|
||||||||||||||||||
|
|
|
|
dt |
dt |
|
|
|
|
|||||||||||||||||||||
|
|
dt |
|
|
|
|
|
|
|
|
|
u |
v |
dt |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
= |
|
du |
|
|
|
|
|
|
|
= |
|
|
|
, |
|
||||||||||
|
|
dy |
|
|
|
dv |
dv |
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
yu |
|
+ yv |
|
|
|
|
|
yu |
yv |
|
|
|
|
|
|
|
|
|||||
|
|
|
dt |
|
|
|
|
dt |
dt |
|
dt |
|
|
|
||||||||||||||||
6 |
∂(x, y) |
|
= 0 |
|||||||||||||||||||||||||||
∂(u, v) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
0 6 |
|
du |
+ |
dv |
> 0 |
|
||||||||||||||||||||||||
|
dt |
|
|
dt |
|
|||||||||||||||||||||||||
dx |
2 |
dy |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
+ |
|
|
|
> 0 |
Γi |
, |
||||||||||||||||||||||
|
dt |
|
dt |
|||||||||||||||||||||||||||
! |
0 |
! |
|
|||||||||||||||||||||||||||
Γ {(u(t), v(t))% a t |
b} |
|||||||||||||||||||||||||||||
t "
D
Γ Γ+
Γ Γ+
D Γ
D Γ±
! "!#
!! b
μD = ± |
|
|
|
x dy = ± xyt dt = |
! |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
! |
Γ± |
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
= ± |
|
b |
|
∂y du |
|
|
∂y |
|
dv |
|
dt = ± |
|
|
|
∂y |
|
|
|
∂y |
|
|||||||||||||||
|
|
x |
|
+ |
|
|
|
x |
du + x |
dv. |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
∂u dt |
∂v dt |
± |
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
Γ |
|
|
∂u |
|
|
|
∂v |
||||||||||||||
|
x |
∂y |
|
= P x |
∂y |
= Q $% |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
∂u |
∂v |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
∂Q |
|
|
∂x ∂y |
|
|
∂2y |
|
∂P |
|
∂x ∂y |
|
|
∂2y |
|||||||||||||||||||
|
|
|
|
|
|
= |
|
|
|
+ x |
|
, |
|
|
|
= |
|
|
|
|
+ x |
|
. |
||||||||||||
|
|
|
∂u |
∂u |
∂v |
∂u∂v |
∂v |
∂v |
∂u |
∂v∂u |
|||||||||||||||||||||||||
|
& |
% |
|
|
|
||||||||||||||||||||||||||||||
G '( ' |
( |
( ' |
( ' |
||||||||||||||||||||||||||||||||
|
∂2y ∂2y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
∂u∂v |
|
∂v∂u |
|
% ) |
||||||||||||||||||||||||||||||
* ! !# ( (
Γ
μD = ± !! |
∂Q |
− |
∂P |
du dv = ± !! |
|
∂(x, y) |
du dv. "# |
||
|
|
|
|
|
|||||
D |
|
∂u |
|
∂v |
D ∂(u, v) |
||||
(
( ( ( ( G
|
|
|
|
|
|
|
|
|
∂(x, y) |
|
∂(x, y) |
|
|
||
|
|
|
|
||||
± |
|
|
= |
|
|
> 0. |
|
∂(u, v) |
∂(u, v) |
||||||
|
|
|
|
||||
+ (
Γ Γ + Γ−# ( (
( "# , -. ('(
§
/ .0 ( ( "# ( |
|||||
|
|
"" |
|
∂(x, y) |
|
|
|
|
|
||
( μD |
|
= |
D |
∂(u, v) |
du dv $ ', |
', # , (
( ) ' "1 2 ""# .-
' (' ) "1 3 !# %
' #
§
a = (P (x, y, z) Q(x, y, z) R(x, y, z)) G R3 '
( ( G . (
'( )) ) |
U 4 G → R |
|||||||||
|
∂U |
|
|
∂U |
|
|
∂U |
|
|
|
P = |
, |
Q = |
, |
R = |
G. |
"# |
||||
|
|
|
||||||||
∂x |
∂y |
∂z |
||||||||
5- U '(-
a a
6 ) U ( a )
U + C % C 7 ( (
a
(
8 % #4 U V 7 (
a ( G V = U + C G % C 7
9 ( ( "# 4
|
∂U |
∂U |
|
∂U |
|
||
a = |
|
ı + |
|
j + |
|
k = grad U = U, |
# |
∂x |
∂y |
∂z |
|||||
dU = P dx + Q dy + R dz,
% 7 ( (
= ∂x∂ , ∂y∂ , ∂z∂ ,
'( ' "
9 % Γ (a, dr) Γ '(-
a Γ
a = (P, Q, R)
G
a G
Γ G
!
(a, dr) = 0.
Γ
A B G
! !
(a, dr),
AB
AB ! "
G A B !
#
IIII Γ1+ Γ2+
G A
B ! Γ+ Γ− |
|
1 |
2 |
|
! |
! |
|
(a, dr) + |
(a, dr) = 0. |
Γ+ |
Γ− |
1 |
2 |
" ! # $ Γ− |
|
|
2 |
# |
|
! |
! |
(a, dr) − (a, dr) = 0, |
|
Γ+ |
Γ+ |
1 |
2 |
|
$ |
|||
!$ Γ+ G A, B Γ Γ+ |
||||
|
|
|
1 |
|
|
AB |
Γ+ |
BA |
# ! Γ+ % |
|
|
|
|
|
|
2 |
|
|
|
$ $ &
Γ+
§ |
|
||||||
! Γ+ |
Γ− |
|
|
|
|
||
1 |
|
|
2 |
||||
A B |
|
|
|||||
! |
! |
|
! |
|
|
|
|
(a, dr) = |
|
|
(a, dr) + |
|
(a, dr) = |
|
|
Γ+ |
Γ |
+ |
Γ+ |
|
|
||
|
1 |
|
2 |
! |
! |
|
|
|
|
|
|
|
= |
(a, dr) − (a, dr) = 0. |
|
|
|
|
|
|
Γ+ |
Γ− |
|
|
|
|
|
|
1 |
2 |
|
|
|
U AB |
= |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= {(x(t), y(t), z(t)) a t b}
G !
! |
|
|
|
|
|
! b |
|
|
P dx + Q dy + R dz = |
[P (x(t), y(t), z(t))x (t)+ |
|
||||
|
|
|
|
|
|
a |
|
AB |
|
|
|
|
|
||
|
|
+Q(x(t), y(t), z(t))y (t) + R(x(t), y(t), z(t))z (t)] dt = |
|||||
! |
b |
|
|
|
|
||
|
|
|
d |
b |
|
||
|
|
|
|
|
|
||
= |
|
|
U (x(t), y(t), z(t)) dt = U (x(t), y(t), z(t)) |
= |
|||
|
|
a |
|
dt |
a |
|
|
= U (B) − U (A).
II I A0 "
B(x, y, z) # G $
" %
!
U (B) = U (x, y, z) P dx + Q dy + R dz, &'(
A0B
A0B G !
" U
&'( # ) B(x, y, z) * x
y z + % &'( # %
" B P dx + Q dy + R dz U
A0
a % &,( # *
) B0 = B0(x0, y0, z0) G -
∂U |
(x0, y0, z0) = P (x0, y0, z0) |
&.( |
∂x |

|
∂U |
|
|
|
|
||||||||||
∂x |
|
|
|||||||||||||
U (x0, y0, z0) |
U (x0 + x, y0, z0) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
A0B0 A0B A0B0 |
|||||||||||||||
|
|
|
|
|
B0 B |
||||||||||
B0B |
B0B |
||||||||||||||
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
U U (x0 + x, y0, z0) − U (x0, y0, z0) = |
|
|
|
|
|
|
|||||||||
! |
|
|
|
! x0+Δx |
|
|
|
|
|
|
|||||
= |
|
P dx + Q dy + R dz = |
|
|
P (x, y0, z0) dx. |
||||||||||
|
|
|
BB0 |
|
x0 |
|
|
|
|
|
|
||||
"
#
$ x
xx = 1 yx = 0 zx |
= 0 ! |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
(x0 |
, y0, z0) − P (x0 |
, y0, z0) |
= |
|
||||
|
x |
|
|
|
! |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
x |
|
[P (x0 + ξ, y0, z0) − P (x0, y0, z0)] dξ |
|
||||
|
|
|
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
max |
|
|P (x0 + ξ, y0, z0) −P (x0, y0, z0)| → 0 |
x → 0, |
|||||||
|
|ξ| | x| |
|
|
|
|
|
|
|
||
% & P (x0, y0, z0)
! $ ' "
( ) & "
a ** $
& + "
a %
**
** & a , # "
|
|
|
§ |
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
a- |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
ı |
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
rota ×a = |
|
∂ |
|
|
∂ |
|
|
|
∂ |
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
∂x |
∂y |
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
P |
Q |
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
∂R |
|
|
∂Q |
|
|
|
|
∂P |
∂R |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
∂Q |
|
|
∂P |
|
||||||||||||||||||||||
= |
|
|
|
|
− |
|
|
ı + |
|
|
|
− |
|
|
|
|
j + |
|
|
|
|
|
− |
|
|
|
k. |
. |
|||||||||
|
∂y |
∂z |
|
|
∂z |
∂x |
∂x |
∂y |
|||||||||||||||||||||||||||||
/ # $ G |
|||||||||||||||||||||||||||||||||||||
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
rota = 0 G |
|
|
|||||||||||||||||||||||||||||||||||
a = (P, Q, R) |
|||||||||||||||||||||||||||||||||||||
G R3 |
|
||||||||||||||||||||||||||||||||||||
)◦ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
0◦ |
|
|
|
|
|
|
|
|
a rota = 0 |
|
|
||||||||||||||||||||||||||
G |
|||||||||||||||||||||||||||||||||||||
|
!G R2 R ≡ 0 P = P (x, y) |
Q = Q(x, y)" |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
rota = 0 G a |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 1 + 1◦ |
|
||||||||||||||||||||||||||||||||||||
|
∂R |
− |
|
∂Q |
= 0, |
|
|
∂P |
− |
∂R |
= 0, |
|
∂Q |
− |
∂P |
= 0. |
2 |
||||||||||||||||||||
|
|
|
|
∂z |
|
|
|
||||||||||||||||||||||||||||||
|
∂y |
|
∂z |
|
|
|
|
|
|
|
|
∂x |
|
|
∂x |
|
∂y |
|
|
||||||||||||||||||
3 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
∂2U |
− |
∂2U |
= 0. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
∂x∂y |
∂y∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 $ |
|
|
|||||||||||||||||||||||||||||||||||
3
%% & + |
|
|
|
4 |
|
2 |
2◦ 5 |
1 + |
# $

! G
" # "
$" |
|
|
|
|
|
|
|
|
||
|
|
|
y |
|
|
|
|
x |
||
a = (P (x, y), Q(x, y)) = − |
|
|
|
, |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
x |
2 |
+ y |
2 |
2 |
+ y |
2 |
||||
|
|
|
|
x |
|
|
||||
%
∂Q |
= |
∂P |
= |
|
y2 − x2 |
|
(x, y) = (0, 0), |
||
|
|
|
|
|
|
||||
∂x |
|
∂y |
(x2 + y2)2 |
|
|||||
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
rota = 0 & # " |
||||||||
# # ! |
||||||||
! |
|
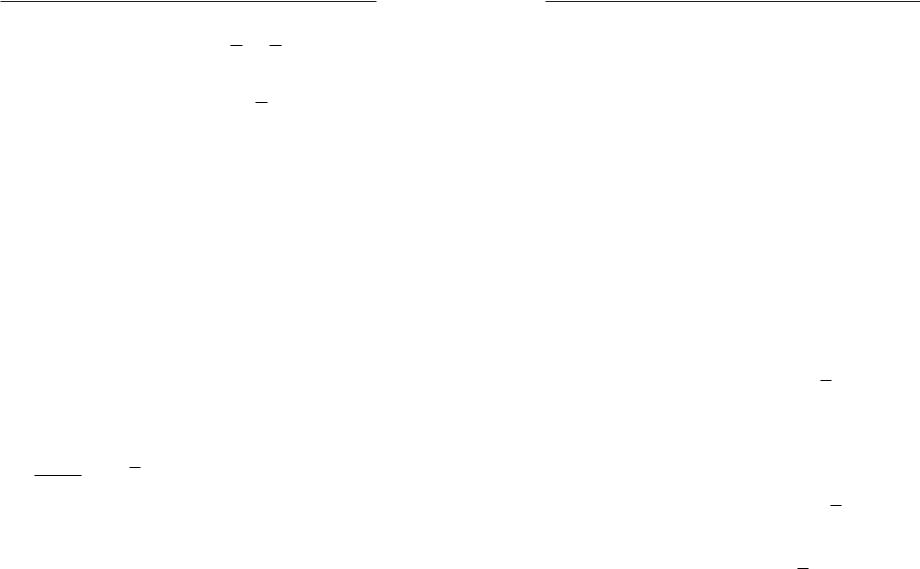
CR = {(R cos θ, R sin θ), 0 θ 2π} : |
||||||
|
|
|
|
|
|
|
|
|
|
(a, dr) = |
|
|
|
|
|
||
CR |
!2π |
|
|
|
|
!2π |
||
|
|
|
|
|
||||
= |
− |
R sin θ |
R(− sin θ) + |
|
R cos θ |
R cos θ |
dθ = dθ = 2π. |
|
|
|
|||||||
|
|
R2 |
|
|
R2 |
|
||
|
0 |
|
|
|
|
|
|
0 |
|
$ " G |
|||||||
|
|
|
||||||
D # ∂D |
|
|
||||||
∂D G D G
& " G " G
G
a =
=(P, Q) ∂Q∂x − ∂P∂y = 0 G
a G
§ |
|
||
' " '" |
( ) |
||
*+ * ), " |
Γ (a, dr) = 0 |
||
Γ G $" |
|
||
Γ # D (∂D = Γ, |
|||
$ - |
!! |
|
|
|
|
|
|
|
|
! |
|
|
∂Q |
− |
∂P |
||||
|
P dx + Q dy = |
|
|
|
dx dy = 0. |
||||
|
|
|
|
∂x |
|
∂y |
|||
∂D |
+ |
|
D |
|
|
|
|||
|
|
|
|
|
|
|
|
||
%
. * / 0
! " /
*+ * ) #
0 !
" 0
!
" # E R2
r$ E → R3# (u, v) E
%
r(u, v) = (x(u, v), y(u, v), z(u, v)) R3. &! ' R2# R3 ( )
x# y# z *
+ " *
" "
# #
a r
&! (u, v) → (u0, v0) E# (u0, v0) (
E
ε > 0 δ = δ(ε) > 0 : |r(u, v) −a| < ε |
|
˚ |
, v0). |
(u, v) E ∩ Uδ (u0 |
, - .
lim r(u, v) = a,
E (u,v)→(u0,v0)
- ˚ |
, v0) E δ > 0# |
|
|
Uδ (u0 |
|
. |
lim r(u, v) = a. |
|
|
||
(u,v)→(u0,v0)
/ * r *
(u0, v0) E#
lim r(u, v) = r(u0, v0).
E (u,v)→(u0,v0)
|
§ |
|
|
||||
ru(u0, v0) (u0, v0) |
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
r∂ |
|
dr(u, v0) |
|
|
|
|
|
|
|
||||
ru(u0 |
, v0) ≡ |
|
(u0, v0) = |
|
|
. |
|
∂u |
du |
||||||
|
|
|
|
u=u0 |
|||
|
|
|
|
|
|
||
+ " * rv ≡ ∂v∂r
.
, # #
" -
§ 0 &!
) E R2
&! *
! - " #
ru D D#
D ru
" " ∂D
D 1 "
r
2 S R3 |
|
||
" |
|
||
S = {(x(u, v), y(u, v), z(u, v)) : (u, v) |
|
}, |
|
D |
3! |
||
" D R2# x# y# z
D
|
x |
y |
z |
|
|
|
|
|
|
|
|
|
|||
rang |
u |
u |
u |
= 2 D, |
|
||
x |
y |
z |
4! |
||||
|
v |
v |
v |
|
|
|
|
!
1)
!
" # $ D D%
& $ '
%
u v
S = {r(u, v) : (u, v) D} S = {rˆ(u, v) : (u, v) D},
r(u, v) (x(u, v), y(u, v), z(u, v)) {(u, v) rˆ(u, v)}
S u, v
! " # $ $ %$ rˆ(u, v) R3 % $
S
& ' $% % % $
%$ M R3 ( ) %
$ (u1, v1), (u2, v2) D
rˆ(u1, v1) = rˆ(u2, v2) = M.
S
* rˆ(u, v)+ D → S %
S = {r(u, v) : (u, v) D} ,
$ (u0, v0) D - %
% D " v = v0 $ %
(u0, v0) D $" $
%$ (u0, v0)
.
{r(u, v0) : (u, v0) D}
v = v0 &$ ru = ∂ur∂ =
= (xu, yu, zu) |
/ |
||||||||||
% u = u0+ |
|
||||||||||
|
|
{r(u0, v) : (u0, v) |
|
} |
|
||||||
|
|
D |
|
||||||||
$ $ |
|
|
|
|
|
|
|||||
|
|
rv = |
r∂ |
= (xv , yv , zv ). |
|
||||||
|
|
|
|
|
|||||||
|
|
∂v |
|
||||||||
- % |
' $ $ |
|
|||||||||
|
|
|
ı |
j |
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|||||
|
|
|
|
|
0 |
||||||
ru |
×rv = xu |
yu |
zu |
= Aı + Bj + Ck, |
|||||||
|
|
x |
y |
z |
|
|
|
|
|
||
|
|
|
v |
v |
v |
|
|
|
|
|
|
§
A = |
∂(y, z) |
|
, B = |
∂(z, x) |
|
, C = |
∂(x, y) |
, |
|
∂(u, v) |
∂(u, v) |
∂(u, v) |
|||||||
|
|
|
|
||||||
1 A2 + B2 + C2 > 0
|
|
|
|
|
|
|
|
|
ru ×rv = |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Sε = {(R cos ϕ cos ψ, R sin ϕ cos ψ, R sin ψ) : |
|
|
||||||
0 ϕ 2π, − |
π |
+ ε ψ |
π |
− ε}, R > 0, 0 < ε < |
π |
, |
||
2 |
2 |
2 |
||||||
|
|
|
|
|
||||
2 %$" $" %$
"
3 * $ %$
$% % $ "
$ 4 %
%$ {(u0, v0), rˆ(u0, v0)} $" ' ' ,
$ ru(u0, v0) rv(u0, v0)
$ ! " %$ |
|
(u0, v0) D {(u(t), v(t))+ a t b} |
$ |
$ u(t0) = u0 v(t0) = v0 $ t0 a < t0 < b
{r(u(t), v(t)) : (u(t), v(t)) D, a t b} '
$ $ 4 4
% %$ {(u0, v0) rˆ(u0, v0)} 5
" $ ! " $" %$ {t0, rˆ(u0, v0)}
rt(t0) = ru(u0, v0)ut(t0) +rv (u0, v0)vt(t0),
" " $* 6 " $ ru rv
% $" $
7 $ $ $ '
%$ {t0, rˆ(u0, v0)} $" $ $
%$ {(u0, v0), rˆ(u0, v0)}
(r −r0,ru,rv) = 0. |
|
r0 = (x0, y0, z0) ! r = = (x, y, z) " !
# $
& ru
|
|
|
|
|
− x0 |
||
x |
|||
|
x |
|
|
|
u |
||
|
|||
|
x |
||
|
|
v |
|
= (xu, yu, zu) rv
|
|
|
|
|
y − y0 |
z − z0 |
|
|
|
|
= 0, |
|
||
y |
z |
|
% |
|
u |
u |
|
|
|
yv |
zv |
|
|
|
= (xv , yv , zv )#
' " ! !
(
)
! #
$
) " ! ( !
) * ! #
+ ( & ,#,#- ! |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ru ×rv = |
0 # ,#,#. # |
|
||||||||||||||||||
' * ( |
|
|||||||||||||||||||
|
|
|
x − x0 |
|
= |
y − y0 |
|
= |
z − z0 |
, |
|
|
|
|||||||
|
|
|
A |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
B |
|
|
|
|
C |
|
|
|
|
|||||
/ |
|
y − y0 |
|
|
|
z − z0 |
|
|
|
|||||||||||
|
x − x0 |
|
|
|
|
|
|
|
|
|||||||||||
|
y |
z = |
|
z |
x |
= |
x |
y , |
- |
|||||||||||
|
u |
u |
|
|
|
|
u |
u |
|
|
|
u |
u |
|
|
|
||||
|
y |
z |
|
|
|
|
z |
x |
|
|
x |
y |
|
|
|
|||||
|
|
v |
v |
|
|
|
|
|
v |
v |
|
|
|
|
v |
v |
|
|
|
|
& x0 = x(u0, v0) y0 = y(u0, v0) z0 = z(u0, v0)
) xu xv yu yv zu zv )! ) ! (u0, v0)# '
S = {(x, y, f (x, y)) : (x, y) D}, .
§
& 0 f ) 0
/ D )
# 1 ) ! ) ! &
! ,#,# # 2 !
#
3 r(x, y) = (x, y, f (x, y)) |
|
|
|
|
|
|
||||||
|
|
rx = (1, 0, fx), |
ry = (0, 1, fy ), |
|
|
|||||||
|
|
|
|
j |
|
|
|
|
|
|
|
|
|
|
|
ı |
k |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
4 |
||||||
|
rx ×ry = 1 |
fx |
|
= −fxı − fyj + k = |
0. |
|||||||
|
|
|
0 |
1 |
fy |
|
|
|
|
|
|
|
5 % ! (x0 y0 |
||||||||||||
f (x0 |
, y0)) |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− x0 |
y |
− y0 |
z − z0 |
|
|
|
|
||
|
|
x |
|
|
|
|
||||||
|
|
|
1 |
|
0 |
|
f |
(x0, y0) |
= 0, |
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
0 |
|
1 |
|
fy |
(x0, y0) |
|
|
|
|
! |
|
|
|
|
|
|
|
|
|
|
|
|
|
z − z0 = (x − x0)fx(x0 |
, y0) + (y − y0)fy (x0, y0), |
6 |
|||||||||
! (x0, y0, f (x0, y0))
|
x − x0 |
= |
y − y0 |
= −(z − z0). |
|
||
|
|
, y0) |
|
, y0) |
7 |
||
|
fx(x0 |
|
fy (x0 |
|
|
||
8 & !
) / ! &
y z z x#
§
! /
& # ' D /
S = {r(u, v) : (u, v) D} , & ! !
0 r ) 0 D
|
|
ru ×rv = |
0# |
u= ϕ(u , v ),
Fv = ψ(u1, v1) : D1 → D,
D1 1 1
˜ |
, v1) : (u1, v1) D1}, |
S = {ρ(u1 |
ρ(u1, v1) = r(ϕ(u1, v1), ψ(u1, v1))
˜
S S
! ! !
|
" |
|
|||||||||||||||||||||
#◦ |
F $ ! |
||||||||||||||||||||||
|
|
|
1 ↔ |
|
|
D1 ↔ D ∂D1 ↔ ∂D% |
|
||||||||||||||||
|
D |
D |
|
||||||||||||||||||||
◦ |
F $ && ' |
|
1 |
|
|||||||||||||||||||
D |
& ( |
||||||||||||||||||||||
|
' ϕ ψ $ && '$ |
|
1 ( |
||||||||||||||||||||
|
D |
||||||||||||||||||||||
|
F−1 $ && ' ( |
||||||||||||||||||||||
|
|
|
% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
D |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
)◦ |
|
∂(u, v) |
|
= 0 D1 |
|
∂(u1, v1) |
= 0 D |
|
|||||||||||||||
|
∂(u1, v1) |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
∂(u, v) |
|
||||||||||||
* ! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
ρu |
1 = ruϕu |
1 +rvψu1 , ρv1 = ruϕv1 +rv ψv1 , |
|
||||||||||||||||||
|
|
|
|
|
|
|
ρ |
×ρ |
= r ×r |
∂(u, v) |
. |
|
|||||||||||
|
|
|
|
|
|
|
) |
||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
u1 |
|
|
v1 |
u |
v ∂(u1, v1) |
|
|||||||||
+ $ |
! 3◦ |
||||||||||||||||||||||
|
|
∂(u, v) |
|
· |
∂(u1, v1) |
= 1 # ) , ! ( |
|||||||||||||||||
∂(u1, v1) |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
∂(u, v) |
|
|
|
|
|
|
|
|
|||||||
∂(u, v)
∂(u1, v1) = 0 D1 +- .-
! ! ! (
$ / )
0 ! ! (
1 ! ! ! ! (
! !
§
* ! (
#
! . $
u, v x, y y, z z, x 2 (
! Sε # # #
! !
$
3
. 4 D
|ru ×rv |2 = A2 + B2 + C2 = |
|
2 |
2 |
|||||
|
2 |
|||||||
|
∂(y, z) |
|
∂(z, x) |
∂(x, y) |
||||
= |
|
|
+ |
|
+ |
|
|
> 0, |
∂(u, v) |
|
|
||||||
|
|
∂(u, v) |
|
∂(u, v) |
||||
(u0, v0) D - ! ( |
|||
|
|
|
|
|
∂(x, y) |
|
|
! + |
|
|
= |
∂(u, v) |
|||
|
|
|
(u0,v0) |
= 0
U (u0, v0) U (x0, y0)
x0 |
= x(u0, v0) y0 = y(u0, v0) |
|||
|
x = x(u, v), |
! |
||
y = y(u, v) |
||||
|
|
|||
U (u0, v0) ↔ U (x0, y0) " U (x0, y0)
|
u = u(x, y), |
||||||
|
v = v(x, y) |
! ##$ |
|||||
|
= 0 |
|
|
||||
|
∂(x, y) |
|
|
(x0, y0) % |
|||
|
|
U |
|||||
∂(u, v) |
|||||||
|
|
|
|
|
|||
& ! '
& ' (
S(0) = {(x(u, v), y(u, v), z(u, v)) : (u, v) U (u0, v0)}
& ! (u, v) (x, y)
S(0) = {(x, y, f (x, y)) : (x, y) U (x0, y0)},
f (x, y) = z(u(x, y), v(x, y))

§
S
! !
|
ru |
×rv |
|
|
n = |
|r |
×r |
| |
|
|
u |
v |
|
|
! " # ! D$
−n
% " # & n −n &
S
% |
|
|
! ! S |
|
|
S |
|
|
S $ &' |
|
|
# ±n$
&
( ) # !
$ * +
, & # & !
!
S $ ! "
+ # !$ &
( & S , !
# ! - - S+$ # !
# ! S−
! !
!
- 1◦$ 2◦$ 3◦ & '+ -
.◦ ∂(u, v) |
> 0 D1 |
||
|
|
||
∂(u1, v1) |
|||
|
|||
$ $
! & ! /$ 0$ '+ !
1 # ,
+
§
+ ,
!$ # +
# !
§
S= {r(u, v) : (u, v) D}
2
rv&$ ru$
|
|
|
|
|
|
|
|
|
|||||
! - D ru |
×rv |
= 0 D |
||||
3 "" # " # r4 |
||||||
|
|
dr = ru |
du +rv dv. |
|||
|dr|2 = |ru du +rv dv|2 = |ru|2du2 + 2(ru,rv ) du dv + |rv |2dv2.
% -
E = |ru|2, |
F = (rur,v ), |
G = |rv |2, |
|
|
|dr|2 = |ru du +rv dv|2 = E du2 + 2F du dv + G dv2. |
|
|||
|
5 " Edu2 + |
|||
+ 2F du dv + Gdv2 |
|
|||
$ E$ F $ G + |
|
|||
" , |
||||
+$ |dr|2 = 0 du = 0$ dv = 0 6 |
||||
$ + , 4 EG − F 2 > 0 |
|
|||
5 $ E > 0$ G > 0 |
|
|
|
|
7$ |
|
|
|
|
EG − F 2 = |ru ×rv |
|2, |
|
||
ω , ru |
rv $ |
|
|
|
EG − F 2 = |ru|2|rv |2 − |ru|2|rv |
|2 cos2 ω = |
|
||
|
|
= |ru|2|rv |2 sin2 ω = |ru ×rv |2. |
||
8 ' & )"" # ! " |
|
|||
, ' $
,