

Понятие об управлении и САУ. Классификация САУ.
Управлением называется целенаправленное воздействие на объект с целью уменьшения неопределенности его состояния.
Объект управления (ОУ) совместно с управляющим устройством образует систему управления(СУ).
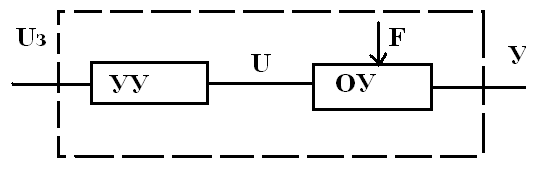
УУ-управляющее устройство.
У – выходная координата
F- воздействие
Uз-заданное значение выходной координаты
Если система функционирует без учета человека,то она называется системой автоматического управления (САУ).
Курс ТАУ состоит из анализа и синтеза САУ
Под анализом понимаем определение динамических и статических свойств систем, установок и т.д.
Под синтезом понимается определение структуры и параметров управляющего устройства, обеспечивающего заданные статические и динамические показатели ситем.
Под структурой понимается вид диф.уравнения или вид передаточных функций, описывающие поведение УУ.
Под параметрами понимают определенные численные значения коэффицментов диф.уравнений или коэффициентов полинома передаточной функции.
Виды и классификация сау.
По способу построений все системы можно разделить на разомкнутые и замкнутые.
Разомкнутые – системы в которых управление не зависит от входной координаты или возмущающего воздействия.
Замкнутые – системы в которых управление зависит от выходной координаты или возмущающего воздействия.
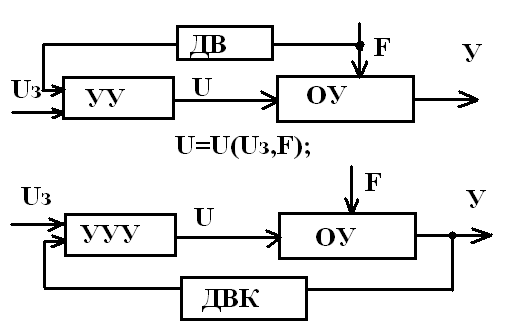
ДВ-Датчик возмущающего воздействия
ДВК-датчик выходных координат
Теорема автоматического управления рассматривает только замкнутые системы.
Диапазон

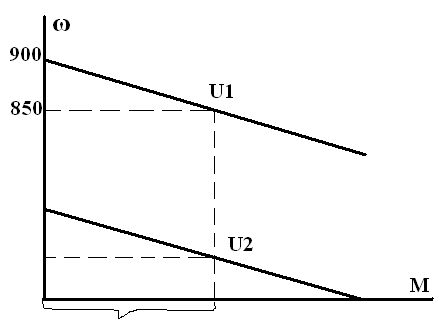
Замкнутые системы делятся на: системы стабилизации (стабилизация частоты вращения; температуры), программные (выходная координата должна изменяться по определенному закону, программе ,функции, времени).
Следящей системой – выходная координата должна изменяться в соответствии с задающим сигналом, закон изменения которого заранее неизвестен.
По способу передачи сигнала все системы делятся на непрерывные и дискретные.
В непрерывных системах сигнал может изменяться в любой момент времени и принимать любые значения.
В дискретных системах сигнал не может изменяться в любой момент времени и принимать любые значения.
Системы построенные с помощью микропроцессоров называются дискретными.
По зависимости между входными и выходными сигналами все системы делятся на линейные и нелинейные. Строго говоря в чистом виде линейных систем не существует.
По цели функционирования все системы делятся на обычные и оптимальные.
Перед любой системой автоматического управления прежде всего ставится задача чтоб она выполняла свое основное функциональное значение.
Оптимальная – такая система которая основное функциональное назначение наилучшим образом с точки зрения критерия качества.
Все системы делятся на системы с жесткой и гибкой настройкой(адаптированные системы).
В системе с жесткой настройкой структура и параметры управляющего устройства не изменялись в процессе функционирования.
В системе с гибкой настройкой могут изменяться структура и параметры управляющего устройства.
Особый класс систем составляющей системы
экстремального управления(СЭУ).
СЭУ могут быть построены для объектов в которых выходные величины могут иметь экстремальную зависимость от входной.
Целью функционирования СЭУ являются поддержание режимов работы объекта в точках экстремума.
Принцип построения замкнутых САУ
По возмущению.
Система по возмущению выглядит следующим образом:

Связь по возмущению всегда +
U=U(U3,F).
Система по возмущению ограничена в
применении т.к для


получения высоких статических свойств при большом диапазоне
регулирования требуется измерение всех возможных воздействий, что
на практике затруднительно в реале невозможно.
По отклонению-
Система по отклонению выглядит следующим образом:
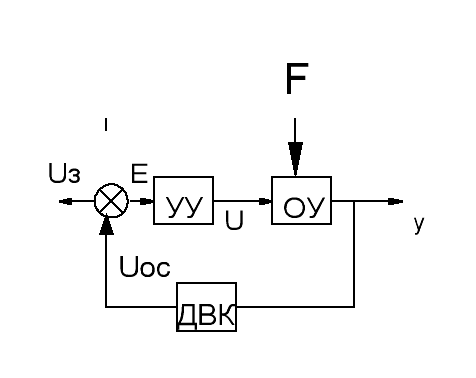
Uос- Обратная связь
У выходной координаты главная отрицательная связь
Всегда отрицательна.
E- ошибка регулирования—разность между
задающим сигналом и сигналом обратной связи.
E=Uз-Uос= Uз-jy
Достоинстватаких систем является то, что они регулируют на сам факт отклонения выходной координаты от задающего значения. Они находят широкое применение на практике.