ответы91-120
.docx89.Приведите формулу, описывающую механическую характеристику вентилятора.
Practi4eski mehani4eskaya harakteristika lubogo proizvodstvennogo mehanizma mozhet bit’ opisana:
![]()
Мсо – privedennii moment pri puske;
Мсн – privedennii moment soprotivleniya pri nominal’noi nagruzke;
α – pokazatel’ stepeni;
![]() –
nominal’naya skorost’.
–
nominal’naya skorost’.
Для вентиляторов α =2.
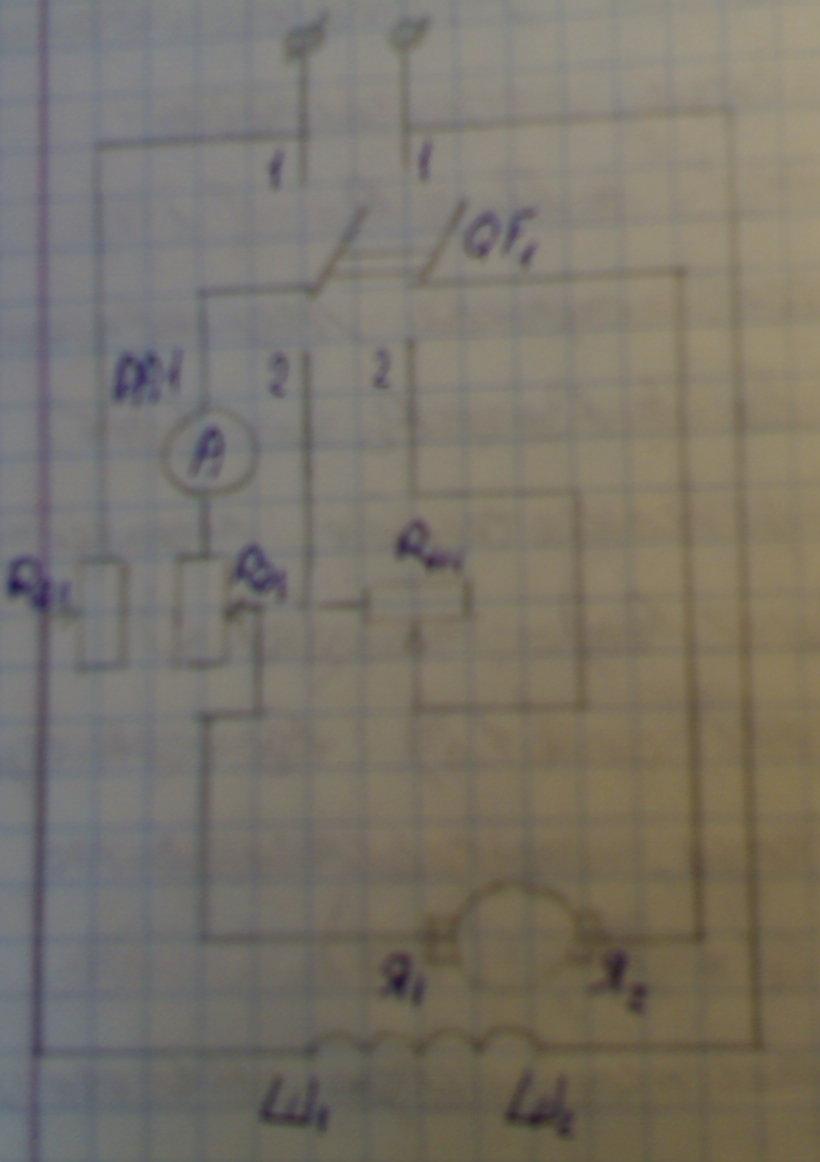
90.Нарисуйте схему, обеспечивающую динамическое торможение АД
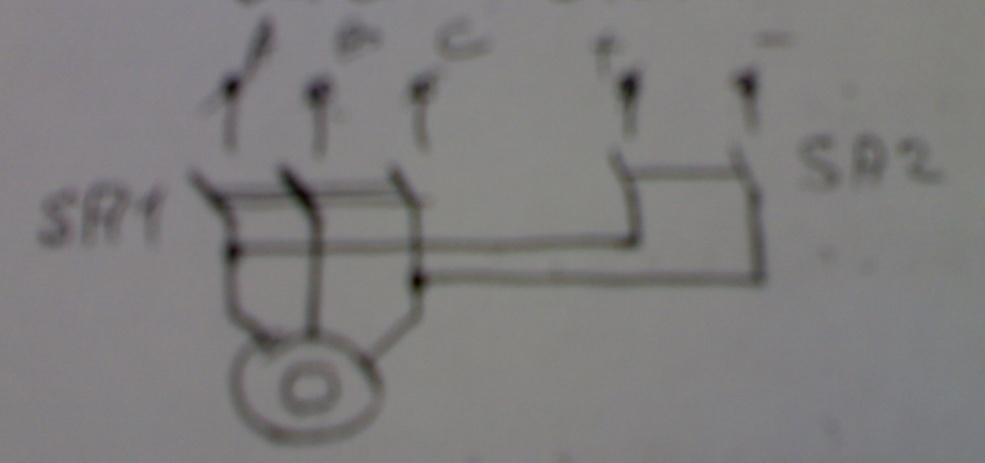
Динамическое торможение АД: SA1- разомкнут, SA2- замкнут } режим двигателя
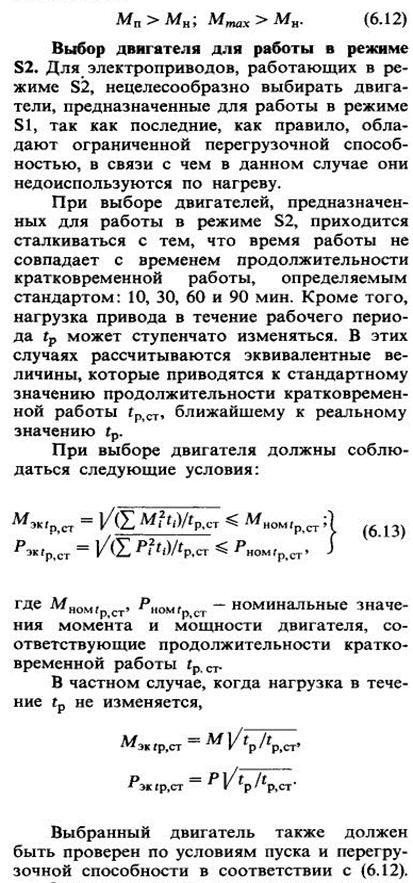
91.Применение метода эквивалентного момента для выбора по мощности ЭМ привода работающего в режиме S1. Ограничения
Метод эквивалентного момента
М= СМ*I
Cправедлив для условия Ф=const и R= const . Метод не может быть применен для машин у которых Ф=var
MЭ=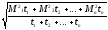
МН≥МЭ
92.Как выбирается вставка предохранителя. Если защищаемая цепь содержит три двигателя.
Защита магистралей, питающих несколько двигателей, должна обеспечивать и пуск двигателя с наибольшим пусковым током и самозапуск двигателей, если он допустим по условиям техники безопасности, технологического процесса и т. п.
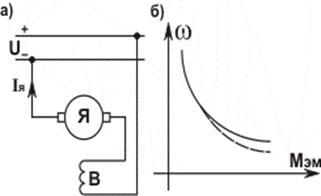
93.Нарисуйте схему динамического торможения машины постоянного тока последовательного возбуждения с самовозбуждением
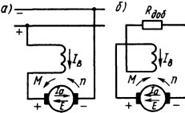
Схемы машины с последовательным возбуждением в режимах
двигательном (а) и динамического торможения (б)
94.Применение метода эквивалентной мощности для выбора по мощности ЭМ привода работающего в режиме S1. Ограничения
Метод эквивалентной мощности
P= M*ω; ω=const, Ф=const, R= const
Метод не может быть применен при ω не const
Pд≥РЭ
95. Как выбирается вставка предохранителя , если защищаемая цепь содержит шесть двигателей.
Защита магистралей, питающих несколько двигателей, должна обеспечивать и пуск двигателя с наибольшим пусковым током и самозапуск двигателей, если он допустим по условиям техники безопасности, технологического процесса и т. п.
96.Дайте определение жесткости механической характеристики
Все механические характеристики имеют падающую характеристику
Жесткость мех. характеристики ЭМ в приводе – β

β= ∞ - абсолютно жесткая мех. характеристика
β= 40÷10 –жесткая мех. характеристика
β<10 – мягкая мех. характеристика
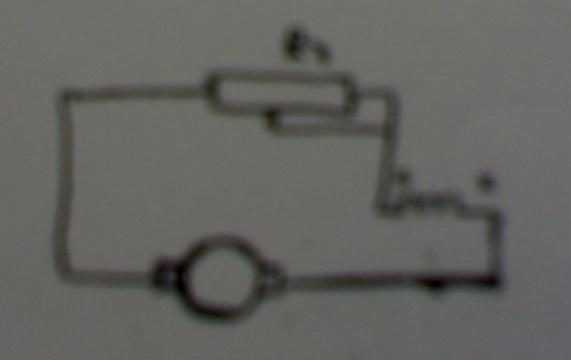
97. Приведите схему динамического торможения машины постоянного тока параллельного возбуждения
Динамическое
торможение возникает в тех случаях,
когда якорь двигателя отключается от
сети и замыкается на сопротивление
динамического торможения Rд.т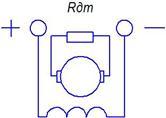
98.Достоинства и недостатки управления скоростью АД изменением числа пар полюсов
Общие достоинства способа регулирования скорости АД изменением числа пар полюсов:
- простота реализации;
- высокая жесткость механических характеристик и отсутствие больших потерь скольжения;
При высокой жесткости механической характеристики изменение момента нагрузки не приводит к существенному изменению угловой скорости, что важно для ряда механизмов.
Общие недостатки:
- регулирование скорости ступенчатое, так как число пар полюсов может быть только целым числом. То есть в заданном диапазоне регулирования реализуется ограниченное число скоростей: для однообмоточных двигателей – обычно две; для двухобмоточных двигателей, как правило, четыре.
- такой способ регулирования скорости малопригоден для автоматизации.
- обмотка с переключением числа полюсов создает МДС с большей величиной высших гармоник поля, чем нормальная трехфазная обмотка. Это приводит к некоторому ухудшению энергетических показателей двигателей с переключением числа полюсов по сравнению с нормальными
99.Приведите совместную мех. характеристику АД и вентилятора

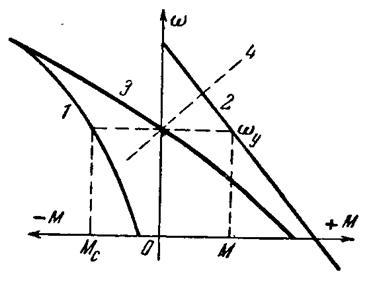
1-механическая характерис- тика вентилятора; 2-механи- ческая характеристика АД; 3-совместная механическая характеристика вентилятор- ного агрегата.
100.Выбор ЭМ привода по мощности из серии машин для режима S2 при переменной нагрузке в цикле работы.
101.Как
выбирается вставка предохранителя ,
если защищаемая цепь содержит один
двигатель IВСТАВКИ ≥ IP MAX и
 ,
где α – коэф,зависящий от условий пуска.
Основным условием, определяющим выбор
плавких предохранителей для защиты
асинхронных двигателей с короткозамкнутым
ротором, является отстройка от пускового
тока.
,
где α – коэф,зависящий от условий пуска.
Основным условием, определяющим выбор
плавких предохранителей для защиты
асинхронных двигателей с короткозамкнутым
ротором, является отстройка от пускового
тока.
102. Приведите пример механизма с абсолютно жесткой механической характеристики.
Синхронный и асинхронный гистерезисный электродвигатели. Такую характеристику имеют синхронные электродвигатели. При жесткой механической характеристике частота вращения электродвигателя -меняется незначительно при изменении вращающего момента. Такую характеристику имеют электродвигатели постоянного тока с параллельным возбуждением и асинхронные электродвигатели (в пределах рабочей части характеристики).
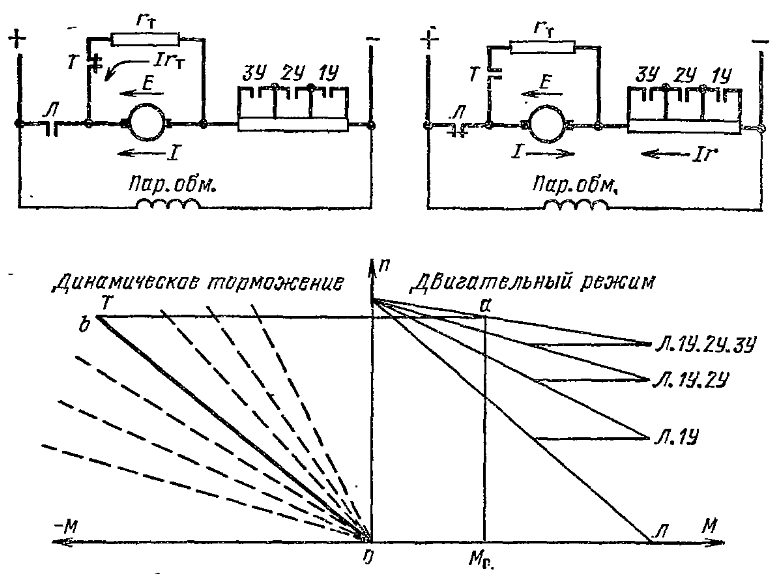
103. Привидите вид механической характеристики торможения противовключением ДПТ
последовательного возбуждения набросом нагрузки

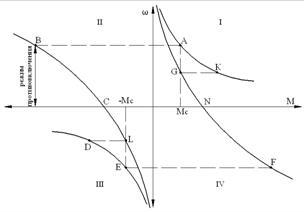
Рисунок 1.2-Механические характеристики двигателя постоянного тока последовательного возбуждения при торможении противовключением
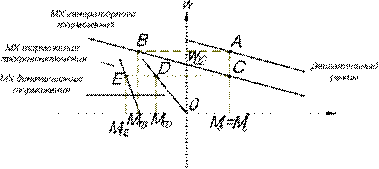
104. Приведите с пояснением характер изменения механической характеристики АД при переключении числа пар полюсов.
Рассмотрим
принцип получения различного числа пар
полюсов при переключении частей обмотки
статора на следующем упрощенном примере.
На рис. 1 показана схема одной фазы
статорной обмотки, которая состоит из
двух одинаковых частей 1н—1к, 2н—2к,
имеющих два проводника. Если секции
соединены так, как это показано на рис.
1а, и к обмотке статора подведен ток I,
имеющий в данный момент времени
направление, показанное стрелками, то
образуется магнитное поле с четырьмя
полюсами, т. е. p = 2 (направление магнитных
силовых линий определяем с помощью
правила буравчика). Оставив направление
тока тем же, изменим несколько схему
соединения обмотки, подключив конец
первой секции 1к к концу второй 2к (рис.
1б). Из рис. 1б следует, что в этом случае
статорная обмотка образует магнитное
поле с числом пар полюсов, вдвое меньшим
по сравнению с полем рис. 1а. 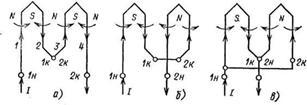
Рассмотрим схемы соединения статора 'и механические характеристики АД для этих случаев.
Треугольник — двойная звезда. Для получения большего числа пар полюсов р^ секции каждой фазы статора включены в треугольник согласно, т. е. так, как это показано на рис. 2а, где А1н и A2н — начала соответственно первой и второй секций фазы A; А1к и A2к — их концы. Обозначения для выводов секций фаз В и С, схемы включения которых аналогичны схемам фазы A, опущены. Соединение секций по схеме рис.2 б, как отмечалось выше, вызовет уменьшение в 2 раза числа пар полюсов АД. Схема рис. 2б, получила название двойной звезды.
Для получения общего вида механических характеристик определим допустимую мощность АД при включении его статора по схемам рис. 2, а и б. Учитывая, что допустимый ток в секции обмотки статора I1доп = I1ном остается неизменным при переключении числа пар полюсов, допустимую первичную мощность определим:
для схемы треугольник (рис. 2, а)
![]() для
схемы двойная звезда (рис. 2, б)
для
схемы двойная звезда (рис. 2, б)
![]()
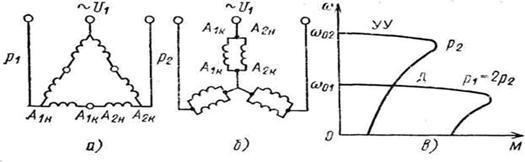
Рис. 2. Соединение обмоток статора в треугольник (а), двойную звезду (б) и механические характеристики при схемах треугольник — двойная звезда (Д—УУ) (в)
Из полученных выражений следует, что при cos φ1д ≈ cos φ1уу допустимая мощность АД остается практически неизменной. Поэтому при увеличении вдвое числа пар полюсов АД и уменьшении тем самым вдвое синхронной скорости допустимый момент на валу АД увеличивается примерно в 2 раза.
105.Выбор ЭМ привода по мощности из серии S1 для режима S2
Берем двигатель с меньшей мощностью , но такой , что температура нагрева обмоток должна дойти до примерного τДОП
106 Назначение плавких предохранителей. Достоинства.
Плавкий предохранитель — это коммутационный электрический элемент, предназначенный для отключения защищаемой цепи путем расплавления защитного элемента. Изготовляют плавкие элементы из свинца, сплавов свинца с оловом, цинка, меди. Предназначены для защиты электрооборудования и сетей от токов короткого замыкания и недопустимых длительных перегрузок.
Достоинства :
1. Время перегорания предохранителей зави сит от силы тока, проходящего через нить. Так, при коротком замыкании, когда ток очень велик, предохранители перегорают достаточно быстро, и в этом наиболее опасном случае служат простой, дешевой и надежной зашитой.
2. В большинстве плавках предохранителей предусмотрена возможность безопасной заме ны плавкой вставки под напряжением.
107. Докажите, что механическая характеристика ДПТ последовательного возбуждения является мягкой.
Механическая характеристика (рис. 5.23, б пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞.
Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения.