

Министерство сельского хозяйства российской федерации
|
|
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧЕРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«БАШКИРСКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ УНИВЕРСИТЕТ» |

Кафедра физики
ЕН.Ф.03 ФИЗИКА
ЕН.Ф.03 ФИЗИКА И БИОФИЗИКА
ЛАБОРАТОРНЫЙ ПРАКТИКУМ
ФИЗИЧЕСКИЕ ОСНОВЫ МЕХАНИКИ
Лабораторная работа № 6
Определение ускорения свободного падения
с помощью оборотного маятника и моментов
инерции маятника
Уфа 2006
УДК 531
ББК 22.21
Л 12
Рекомендовано к изданию методической комиссией факультета электрификации и автоматизации с/х (протокол № 3 от 30 ноября 200 6 года)
Составитель: доцент Амирханов Н.М.
Рецензент: доцент кафедры ТОЭ Желтоухов А.И.
Ответственный за выпуск: зав. кафедрой физики Юмагужин Р.Ю.
Практикум предназначен для всех направлений и специальностей подготовки дипломированных специалистов.
Лабораторная работа № 6
Определение ускорения свободного падения
с помощью оборотного маятника и моментов
инерции маятника
Цель и задачи работы:Изучить гармонические колебания; экспериментально определить с помощью физического маятника ускорение свободного падения и моменты инерции маятника.
1 Общие сведения
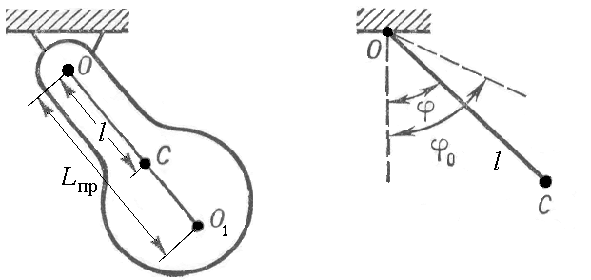
Под физическим маятником понимают твердое тело, которое совершает колебания под действием силы тяжести около горизонтальной оси, не проходящей через центр масс маятника (рисунок 1а). Если колеблющееся тело можно представить как материальную точку, висящую на невесомой нерастяжимой нити, то маятник называется математическим (рисунок 1б).
а б
Рисунок 1 Маятники: а– физический;б– математический.
С– центр масс маятника;O– точкой подвеса;O1– центр
качаний; – угол отклонения маятника от вертикали
Если амплитуда угловых колебаний 0мала (в пределах 45), то период колебаний физического маятника выражается формулой
![]() , (14)
, (14)
где J– момент инерции маятника относительно оси колебания,кгм2;
m– масса маятника,кг;
l=OC– расстояние от точки подвеса до центра масс маятника,м;
![]() – приведенная длина физического
маятника,м.
– приведенная длина физического
маятника,м.
Физический маятник обладает следующим свойством: для любой точки подвеса O(период колебанийT) найдется такая точкаO1(периодT1), чтоT=T1. Одна из точек, например,Oназывается точкой подвеса, другая точкаO1– центр качаний.
Условие T=T1, свидетельствует о том, что точка подвесаOи центр качанийO1обратимы, поэтому эти точкиOиO1называются сопряженными. Физический маятник, имеющий сопряженные точкиOиO1, называется оборотным.
Приведенная длина оборотного маятника Lпрдля данной пары сопряженных точекO;O1равна расстоянию между нимиOO1(рисунок 1а).
2 Описание установки и вывод расчетной формулы
В комплект лабораторной установки входят маятник (рисунок 2), секундомер, мерная линейка.
Чечевицу 2 можно передвигать по стержню и фиксировать с помощью винта. Для определения ее положения на конце стержня нанесены миллиметровые деления 1. Опорные призмы 3 и 7 закреплены на стержне 5 жестко.
На рисунке 2 приведено одно из положений маятника. При этом маятник будет колебаться относительно призмы 3. Можно перевернуть маятник и установить призму 7 в канавку 4. Если передвигать чечевицу 2 по стержню, то изменится положение точки C– центра масс маятника, а, следовательно, и период колебаний.
Исходя из (1) период колебаний маятника на ребре призмы (оси) Авыразится:
![]() ,
(15)
,
(15)
а период колебаний на ребре призмы (оси) B:
![]() ,
(16)
,
(16)
где JА– момент инерции маятника относительно осиA;
JB– момент инерции маятника относительно осиB.
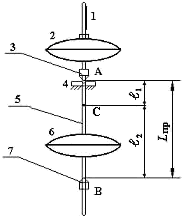
Рисунок 2 Схема подвешенного оборотного маятника:
1 – миллиметровая шкала; 2 – подвижная чечевица;
3, 7 – опорные призмы; 4 – опорная канавка; 5 – стержень;
6 – неподвижная чечевица
На рисунке приняты обозначения: С– центр масс маятника;l1– расстояние между ребромАи точкойС;l2– расстояние между ребромВи точкойС
Преобразуем (2) и (3), используя теорему Штейнера, которая для колебаний на ребре призмы Aзаписывается как
JA=JC+mCl12, (17)
и гласит: момент инерции маятника относительно ребра призмы Аравен сумме момента инерции маятника относительно центра массC(JC) и произведения массы на квадрат расстояния от оси вращения до центра массC(mCl12).
Теорема Штейнера для колебаний маятника относительно ребра призмы Bзаписывается в виде
JB=JC+mCl22, (18)
где l2- расстояние между ребромBи центром массC;JC- момент инерции оборотного маятника относительно центра массC.
Определение величины Jтела сложной формы, такого как оборотный маятник, является трудной задачей. Поэтому преобразуем зависимости моментов инерции так, чтобы исключить величинуJC.
Перепишем формулы (2) и (3) с учетом выражений (4) и (5)
 ,
(19)
,
(19)
 .(20)
.(20)
Для решения нашей задачи найдем такое положение чечевицы 2, что будет выполняться условие
TА=TВ=T0. (21)
Подставим (6) и (7) в условие (8): .
.
Отсюда получаем
JC=ml1l2. (22)
Выражение (9) подставим, например, в формулу (6) (или в (7))
 .
.
Учтем, что mC=m, тогда получаем
![]() .
.
Отсюда ускорение свободного падения
тел
![]() ,
,
где, как видно из рисунка 2, l1+l2=Lпр(Lпр- приведенная длина оборотного маятника).
Таким образом, для вычисления ускорения свободного падения тел окончательно получаем
![]() .(23)
.(23)
Из (10) видно, что требуется найти экспериментально такие периоды колебаний маятника, чтобы выполнялось условие (8). Заметим, что добиться точного совпадения значений TАиTВпрактически невозможно. Приходится подбирать такое положение чечевицы 2, чтобы на призмах 3 и 7 оборотный маятник совершал колебания с приблизительно одинаковыми периодамиTАTВ.