

5.1 Переходный процесс по каналу регулирующего воздействия s-y
Для одноконтурной системы регулирования, приведенной на рисунке 1, определим передаточную функцию замкнутой АСР по каналу S-Y по формуле:
![]() ,
(12)
,
(12)
где передаточная функция объекта
регулирования
![]() ;
;
передаточная функция ПИ- регулятора
![]() .
.
После подстановки значения
![]() в формулу (12), получаем окончательное
выражение для передаточной функции
замкнутой АСР по каналу S-Y:
в формулу (12), получаем окончательное
выражение для передаточной функции
замкнутой АСР по каналу S-Y:
 (13)
(13)
Получим выражение для АФЧХ замкнутой
системы путём замены оператора p
в формуле (13) на
![]() ,
в результате получаем:
,
в результате получаем:
![]() (14)
(14)
Используя программу MathCad,
предварительно задав диапазон изменения
частоты
![]() с-1
с шагом
с-1
с шагом
![]() c-1,
рассчитываем вещественную частотную
характеристику замкнутой АСР при
регулирующем воздействии: ReЗ.С..1(ω).
Результаты расчёта сведём в таблицу 4.
c-1,
рассчитываем вещественную частотную
характеристику замкнутой АСР при
регулирующем воздействии: ReЗ.С..1(ω).
Результаты расчёта сведём в таблицу 4.
Таблица 4 – Результаты расчёта ВЧХ замкнутой АСР при регулирующем воздействии
|
частота ω, с-1 |
ReЗ.С.1(ω) |
|
0 |
1 |
|
0,005 |
0,9543776 |
|
0,010 |
0,6574893 |
|
0,015 |
-0,5996062 |
|
0,020 |
-0,6668988 |
Продолжение таблицы 4
|
0,025 |
-0,3679645 |
|
0,030 |
-0,2076016 |
|
0,035 |
-0,1236057 |
|
0,040 |
-0,076551 |
|
0,045 |
-0,0486453 |
|
0,050 |
-0,0313735 |
|
0,055 |
-0,0203348 |
|
0,060 |
-0,0131055 |
|
0,065 |
-0,0082817 |
|
0,070 |
-0,0050179 |
|
0,075 |
-0,0027877 |
|
0,080 |
-0,001255 |
|
0,085 |
-0,0001999 |
|
0,090 |
0,0005238 |
|
0,095 |
0,0010153 |
|
0,100 |
0,0013428 |
По данным таблицы 4 строим график ВЧХ замкнутой АСР, который приведен на рисунке 4.

Рисунок 4 - График ВЧХ замкнутой АСР при регулирующем воздействии
Переходный процесс в замкнутой АСР по каналу S-Y можно рассчитать по методу трапеций, используя график ВЧХ замкнутой АСР, приведенный на рисунке 4.
Установлено, что переходная характеристика какой- либо системы y(t) связана с ВЧХ этой системы Re(ω) выражением:
![]() (15)
(15)
где t – время переходного процесса в замкнутой АСР.
Для более точного расчёта в качестве
верхнего предела интеграла для y(t)
принимают не
![]() ,
а значение частоты, при которой график
Re(ω) стремится к 0, т.е.
частоту среза ωСР. По графику,
приведенному на рисунке 4, определяем,
ωСР =0,075 с-1. Поэтому
переходный процесс в замкнутой АСР по
каналу S-Y
можно рассчитать по формуле:
,
а значение частоты, при которой график
Re(ω) стремится к 0, т.е.
частоту среза ωСР. По графику,
приведенному на рисунке 4, определяем,
ωСР =0,075 с-1. Поэтому
переходный процесс в замкнутой АСР по
каналу S-Y
можно рассчитать по формуле:
![]() (16)
(16)
Задав диапазон изменения времени
переходного процесса
![]() с
с шагом
с
с шагом
![]() с,
рассчитываем переходный процесс в
замкнутой АСР по каналу S-Y.
Результаты расчета сведём в таблицу 5.
с,
рассчитываем переходный процесс в
замкнутой АСР по каналу S-Y.
Результаты расчета сведём в таблицу 5.
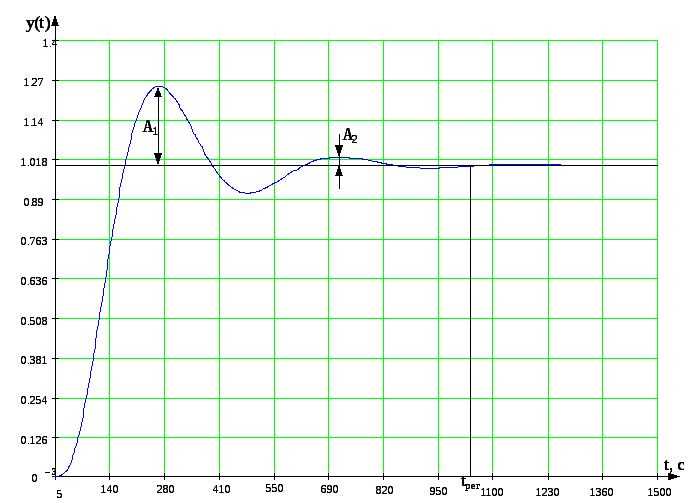
Рисунок 5 - Переходный процесс в замкнутой АСР
Таблица 5 – Результаты расчёта переходного процесса в замкнутой АСР по каналу S-Y
|
время t, с |
yS-Y(t) |
|
0 |
0 |
|
50 |
0,069 |
|
100 |
0,39 |
|
150 |
0,806 |
|
200 |
1,12 |
|
250 |
1,249 |
|
300 |
1,216 |
|
350 |
1,102 |
|
400 |
0,988 |
|
450 |
0,922 |
|
500 |
0,914 |
|
550 |
0,943 |
|
600 |
0,984 |
|
650 |
1,014 |
|
700 |
1,026 |
|
750 |
1,022 |
|
800 |
1,01 |
|
850 |
0,999 |
|
900 |
0,993 |
|
950
|
0,992 |
|
1000 |
0,995 |
|
1050 110
|
0,999 1,002 |
|
1100 |
1,002 |
|
1150 |
1,003 |
|
1200 |
1,002 |
|
1250 |
1,001 |
|
1300 |
1 |
|
1350 |
0,999 |
|
1400 |
0,999 |
|
1450 |
0,999 |
|
1500 |
1 |
По данным таблицы 5 строим график переходного процесса в замкнутой АСР по
каналу S-Y, который приведён на рисунке 5.
t, с
Прямые критерии качества:
1.Максимальная динамическая ошибка: А1=0,253;
2.Перерегулирование:
![]() (17)
(17)
где
![]() -
уровень установившегося значения
регулируемой величины при времени
переходного процесса
-
уровень установившегося значения
регулируемой величины при времени
переходного процесса
![]() ,
равного
,
равного
![]() ;
;
3.Динамический коэффициент регулирования Rд не определяется для такого типа процессов;
4.Степень затухания переходного процесса:
![]() (18)
(18)
где
![]() -
второй максимальный выброс регулируемой
величины;
-
второй максимальный выброс регулируемой
величины;
5.Статическая ошибка:
![]() (19)
(19)
где S – сигнал регулирующего воздействия 1(t);
6.Время регулирования:
![]() при величине
при величине
![]() .
.
Все приведенные выше критерии качества указаны на рисунке 5.
5.2 Переходный процесс при возмущении f, идущем по каналу
регулирующего воздействия
Для одноконтурной системы регулирования, приведенной на рисунке 1, определим передаточную функцию замкнутой АСР по каналу F-Y по формуле:
![]() (20)
(20)
После подстановки выражения для
![]() в формулу (7), получаем окончательное
выражение для передаточной функции
замкнутой АСР по каналу F-Y:
в формулу (7), получаем окончательное
выражение для передаточной функции
замкнутой АСР по каналу F-Y:
 (21)
(21)
Получим выражение для АФЧХ замкнутой
системы путём замены оператора p
в формуле (18) на
![]() ,
в результате получаем:
,
в результате получаем:
![]() (22)
(22)
Используя программу MathCad,
предварительно задав диапазон изменения
частоты
![]() с-1
с шагом
с-1
с шагом
![]() c-,
рассчитываем вещественную частотную
характеристику замкнутой АСР: ReЗ.С.2(ω).
Результаты расчёта сведём в таблицу 6.
c-,
рассчитываем вещественную частотную
характеристику замкнутой АСР: ReЗ.С.2(ω).
Результаты расчёта сведём в таблицу 6.
Таблица 6 - Результаты расчёта ВЧХ замкнутой АСР при возмущении f
|
частота ω, с-1 |
ReЗ.С.2(ω) |
|
0 |
0 |
|
0,01 |
0,239 |
|
0,02 |
0,632 |
|
0,03 |
0,189 |
Продолжение таблицы 6
|
0,04 |
-0,343 |
|
0,05 |
-0,234 |
|
0,06 |
-0,154 |
|
0,07 |
-0,107 |
|
0,08 |
-0,077 |
|
0,09 |
-0,057 |
|
0,10 |
-0,043 |
|
0,11 |
-0,033 |
|
0,12 |
-0,025 |
|
0,13 |
-0,019 |
|
0,14 |
-0,015 |
|
0,15 |
-0,011 |
|
0,16 |
-0,008 |
|
0,17 |
-0,006 |
|
0,18 |
-0,003 |
|
0,19 |
-0,002 |
|
0,20 |
-0,001 |
По данным таблицы 6 строим график ВЧХ замкнутой АСР при возмущении f, который приведен на рисунке 6.
ReЗ.С.2(ω)
ω, с-1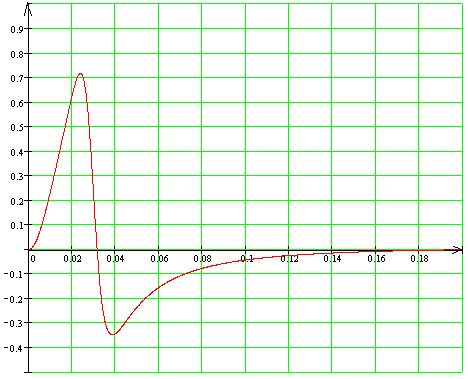
Рисунок 6 – График ВЧХ замкнутой АСР при возмущении f
Переходный процесс в замкнутой АСР по каналу F-Y можно рассчитать по методу трапеций, используя график ВЧХ замкнутой АСР при возмущении f (рисунок 6).
Поэтому переходный процесс в замкнутой АСР по каналу F-Y можно рассчитать по формуле:
![]() (23)
(23)
Как уже было сказана выше, для более точного расчёта в качестве верхнего предела интеграла для yF-Y(t) принимают значение частоты среза ωСР. По графику, приведенному на рисунке 6, определяем, что ωСР =0,14 с-1.
Задав диапазон изменения времени
переходного процесса
![]() с
с шагом
с
с шагом
![]() с,
рассчитываем переходный процесс в
замкнутой АСР по каналу F-Y.
Результаты расчета сведём в таблицу 7,
приведенную ниже.
с,
рассчитываем переходный процесс в
замкнутой АСР по каналу F-Y.
Результаты расчета сведём в таблицу 7,
приведенную ниже.
Таблица 7 - Результаты расчёта переходного процесса в замкнутой АСР по каналу F-Y
|
время t, c |
yF-Y(t) |
|
0 |
0 |
|
20 |
0,029 |
|
40 |
0,159 |
|
60 |
0,302 |
|
80 |
0,389 |
|
100 |
0,39 |
|
120 |
0,312 |
|
140 |
0,191 |
|
160 |
0,064 |
|
180 |
-0,032 |
|
200 |
-0,082 |
|
220 |
-0,085 |
|
240 |
-0,055 |
|
260 |
-0,011 |
|
280 |
0,029 |
|
300 |
0,052 |
|
320 |
0,056 |
|
340 |
0,044 |
|
360 |
0,023 |
|
380 |
0,0007 |
|
400 |
-0,015 |
|
420 |
-0,022 |
|
440 |
-0,018 |
Продолжение таблицы 7
|
460 |
-0,012 |
|
480 |
-0,003 |
|
500 |
0,005 |
|
520 |
0,009 |
|
540 |
0,010 |
|
560 |
0,007 |
|
580 |
0,003 |
|
600 |
-0,0008 |
|
620 |
-0,003 |
|
640 |
-0,004 |
|
660 |
-0,003 |
|
680 |
-0,002 |
|
700 |
-0,0004 |
По данным таблицы 7 строим график переходного процесса в замкнутой АСР по каналу F-Y, представленный на рисунке 7.
yF-Y(t) t,
c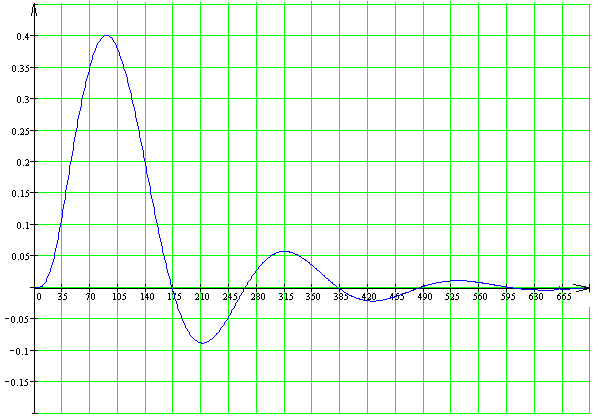
Рисунок 7 - График переходного процесса в замкнутой АСР по каналу F-Y
Используя данные таблицы 7 и рисунка 7, произведём оценку качества переходного процесса в замкнутой АСР по каналу F-Y.
Прямые критерии качества:
1.Максимальная динамическая ошибка: А1=0,401;
2.Перерегулирование:
![]() (24)
(24)
где
![]() -
первое минимальное отклонение регулируемой
величины;
-
первое минимальное отклонение регулируемой
величины;
3.Динамический коэффициент регулирования
RД:
![]() (25)
(25)
где
![]() - коэффициент передачи объекта;
- коэффициент передачи объекта;
4.Степень затухания переходного процесса:
![]() ;
;
5.Статическая ошибка:
![]() ;
;
6.Время регулирования:
![]() при величине
при величине
![]() .
.
Так как в заданной АСР, представленной
на рисунке 2, имеется звено чистого
транспортного запаздывания с передаточной
функцией
![]() ,
то переходные процессы в этой системе
имеет запаздывание на величину 8 с
относительно их начала. Для наглядности
указанного факта изобразим начальные
части графиков переходных процессов
по каналам S-Y
и F-Y
соответственно на рисунке 8 и 9.
,
то переходные процессы в этой системе
имеет запаздывание на величину 8 с
относительно их начала. Для наглядности
указанного факта изобразим начальные
части графиков переходных процессов
по каналам S-Y
и F-Y
соответственно на рисунке 8 и 9.
t,
c
yS-Y(t)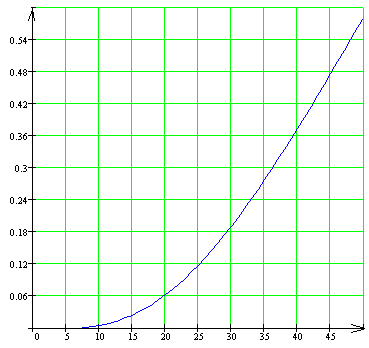
Рисунок 8 – Начальный участок графика переходного процесса в замкнутой АСР по каналу S-Y
yF-Y(t)
t,
c
Рисунок 9 – Начальный участок графика переходного процесса в замкнутой АСР по каналу F-Y
Заключение
Определение оптимальных параметров настройки регуляторов, расчёт различных систем автоматического регулирования, без сомнения, являются одними из главных задач любого инженера – конструктора. Использование современных систем регулирования требует знания различных методов и приёмов расчёта этих систем, определения и установки требуемых параметров настройки регулятора, основных недостатков и преимуществ разного рода регуляторов по сравнению друг с другом.
В процессе написания курсовой работы был изучен один из двух инженерных методов расчёта одноконтурных систем регулирования: корневой метод (с использованием РАФЧХ). Было выяснено, что оптимальными параметрами настройки какого-либо регулятора считают те параметры, при которых обеспечивается близкий к оптимальному процесс регулирования. Под оптимальным процессом регулирования обычно понимают процесс, удовлетворяющий требованиям к запасу устойчивости системы. Автор установил, что поиск оптимальных параметров настройки осуществляется вдоль границы заданного запаса устойчивости системы регулирования до достижения экстремума принятого критерия качества. В данной курсовой работе, согласно заданию, в качестве принятого критерия качества был принят второй интегральный критерий.
В результате проделанной работы, были получены переходные процессы по каналам S-Y и F-Y. Оценка качества этих процессов показала, что они удовлетворяют требованиям к запасу устойчивости системы, приведенных в исходных данных.
Можно заметить, что переходный процесс по каналу F-Y имеет прямые критерии качества лучше, чем переходный процесс по каналу S-Y:
- максимальная динамическая ошибка: для S-Y А1=0,461, для F-Y А1=0,401;
- перерегулирование: для S-Y
![]() ,
для F-Y
,
для F-Y
![]() ;
;
- степень затухания переходного процесса:
для S-Y
![]() ,
для F-Y
,
для F-Y
![]() ;
;
- время регулирования: для S-Y
![]() ,
для F-Y
,
для F-Y
![]() ;
;
- статическая ошибка для этих процессов
равна:
![]() .
.
После написания курсовой работы становится понятно, для каких целей выполняются расчёты систем автоматического регулирования, как производится синтез различных АСР путём замены регуляторов или изменением параметров их настройки.