

1 Исходные данные
Дана система регулирования с ПИ- регулятором и объектом регулирования с передаточной функцией:
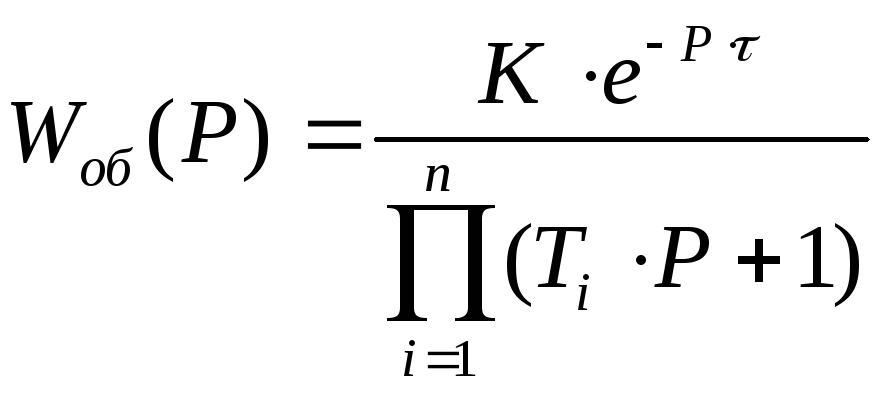 ,
,
Параметры передаточной функции объекта, требования к запасу устойчивости системы, критерий оптимальной настройки приведены в таблице 1.
Таблица 1 – Исходные данные
|
Номер варианта |
K |
n |
T |
ψ |
I |
|
31 |
1,8 |
2 |
100 |
0,9 |
I2 |
|
|
|||||
|
Обозначения: K – коэффициент передачи объекта; τ – запаздывание объекта; Ti – i-я постоянная времени объекта; n – порядок объекта; ψ – требуемая степень затухания переходных процессов в системе; I – заданный интегральный критерий качества работы системы.
|
|||||
2 Структурная схема одноконтурной аср
Структурная схема системы регулирования, приведенная в задании имеет вид:
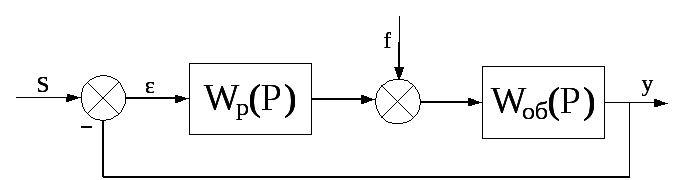
Рисунок 1 – Структурная схема заданной системы регулирования
Учитывая исходные данные, приведенные ранее структурную схему системы регулирования можно преобразовать к виду:
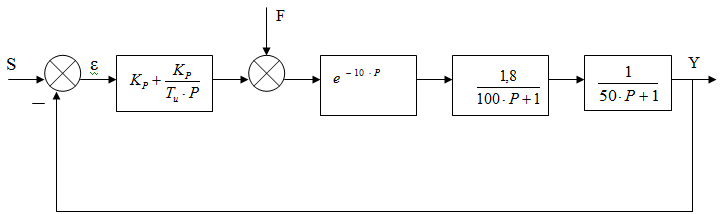
Рисунок 2 – Преобразованная структурная схема заданной системы регулирования
3 Расчёт и построение границы заданного запаса устойчивости аср
Для расчёта и построения границы заданного запаса устойчивости АСР с ПИ-регулятором, представленной на рисунке 1, воспользуемся корневым методом параметрического синтеза систем автоматического регулирования с применением расширенных амплитудно-фазовых частотных характеристик (РАФЧХ).
Используя исходные данные, приведенные
в таблице 1, можем записать, что для
заданной системы регулирования
установлены следующие требования к
запасу устойчивости системы: степень
затухания переходного процесса в
системе![]() .
.
Исходя из этого, зная зависимость между степенью затухания переходных процессов в заданной системе регулирования ψ и степенью колебательности переходных процессов в заданной системе регулирования m, можно определить значение заданной степени колебательности m системы по формуле:
![]() (1)
(1)
где ψ - степенью затухания переходных процессов в заданной системе регулирования.
Передаточная функция объекта регулирования согласно исходным данным определяется по формуле:
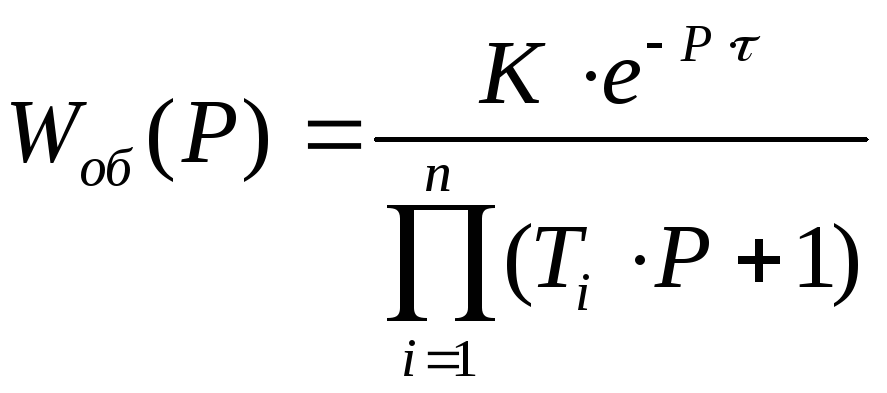 (2)
(2)
где p – оператор Лапласа.
При n=2 выражение для
примет вид
![]() примет вид:
примет вид:
![]() (3)
(3)
По данным таблицы 1 определяем значения
неизвестных параметров: К=1,8 ,
![]() ,
T1=100 , T2=50.
Тогда после подстановки значений выше
приведенных параметров получаем
окончательное выражение для передаточной
функции объекта регулирования:
,
T1=100 , T2=50.
Тогда после подстановки значений выше
приведенных параметров получаем
окончательное выражение для передаточной
функции объекта регулирования:
![]() (4)
(4)
Определим расширенные частотные
характеристики объекта регулирования.
Расширенные частотные характеристики
какого-либо звена можно получить
подстановкой в передаточную функцию
этого звена W(P)
оператора
![]() или
или
![]() ,
в выражениях для оператора Лапласа ω –
частота, с-1. В первом случае
расчётные формулы метода обеспечивают
получение границы заданной степени
колебательности системы m,
а во втором - получение границы заданной
степени устойчивости системы
,
в выражениях для оператора Лапласа ω –
частота, с-1. В первом случае
расчётные формулы метода обеспечивают
получение границы заданной степени
колебательности системы m,
а во втором - получение границы заданной
степени устойчивости системы
![]() в пространстве параметров настройки
регулятора.
в пространстве параметров настройки
регулятора.
Заменим в формуле (4) оператор
![]() ,
в результате получаем выражение для
РАФЧХ объекта регулирования:
,
в результате получаем выражение для
РАФЧХ объекта регулирования:
![]() (5)
(5)
Используя программу MathCad,
предварительно задав начальное значение
частоты
![]() =0
с-1 и шаг по частоте
=0
с-1 и шаг по частоте
![]() с-1,
рассчитываем расширенные частотные
характеристики объекта при изменении
частоты до ω=0,20 с-1.
с-1,
рассчитываем расширенные частотные
характеристики объекта при изменении
частоты до ω=0,20 с-1.
Расширенная вещественная частотная характеристика (РВЧХ):
Reоб(m,ω)=Re(Wоб(m,iω)) (6)
Расширенная мнимая частотная характеристика (РМЧХ):
Imоб(m,ω)=Im(Wоб(m,iω)) (7)
Расширенная амплитудно-частотная характеристика (РАЧХ)
![]() (8)
(8)
Расширенная фазо-частотная характеристика (РФЧХ):
![]() (9)
(9)
Результаты расчётов сведём в таблицу 2, приведенную ниже.
Таблица 2 – Расширенные частотные характеристики объекта регулирования
|
частота ω, с-1 |
Reоб(m,ω) |
Imоб(m,ω) |
Аоб(m,ω) |
φоб(m,ω), рад |
|
0 |
1,8 |
0 |
1,8 |
0 |
|
0,005 |
1,09602 |
-1,811 |
2,117 |
-1,027 |
|
0,01 |
-0,69553 |
-1,586 |
1,732 |
1,157 |
|
0,015 |
-1,09288 |
-0,478 |
1,193 |
0,412 |
|
0,02 |
-0,77535 |
0,123 |
0,785 |
-0,157 |
|
0,025 |
-0,42762 |
0,291 |
0,517 |
-0,598 |
|
0,03 |
-0,2037 |
0,282 |
0,348 |
-0,946 |
|
0,035 |
-0,08166 |
0,226 |
0,241 |
-1,225 |
|
0,04 |
-0,02018 |
0,17 |
0,171 |
-1,453 |
|
0,045 |
0,009 |
0,125 |
0,125 |
1,499 |
|
0,05 |
0,02171 |
0,091 |
0,094 |
1,337 |
|
0,055 |
0,02623 |
0,067 |
0,072 |
1,198 |
|
0,06 |
0,02678 |
0,05 |
0,056 |
1,075 |
|
0,065 |
0,02551 |
0,037 |
0,045 |
0,966 |
|
0,07 |
0,02349 |
0,028 |
0,036 |
0,867 |
|
0,075 |
0,02125 |
0,021 |
0,03 |
0,777 |
Продолжение таблицы 2
|
0,08 |
0,01904 |
0,016 |
0,025 |
0,695 |
|
0,085 |
0,01699 |
0,012 |
0,021 |
0,618 |
|
0,09 |
0,01514 |
0,0092 |
0,018 |
0,546 |
|
0,095 |
0,01348 |
0,0069 |
0,015 |
0,478 |
|
0,100 |
0,01202 |
0,0053 |
0,013 |
0,414 |
Расчётные формулы корневого метода для ПИ- регулятора имеют следующий вид:
 (10)
(10)
![]() (11)
(11)
В вышеприведенных формулах (10) и (11)
![]() -
коэффициент передачи ПИ- регулятора,
-
коэффициент передачи ПИ- регулятора,
![]() -
постоянная интегрирования ПИ- регулятора.
-
постоянная интегрирования ПИ- регулятора.
Зададим диапазон изменения
частоты
![]() с-1
с шагом
с-1
с шагом
![]() c-1,
определим настройки регулятора
c-1,
определим настройки регулятора
![]() и Кр в заданном диапазоне частот.
Результаты расчётов сведём в таблицу
3.
и Кр в заданном диапазоне частот.
Результаты расчётов сведём в таблицу
3.
Таблица 3 –Результаты расчёта настройки ПИ- регулятора в заданном диапазоне частот
|
частота ω, с-1 |
|
Кр |
|
0 |
0 |
-0,556 |
|
0,005 |
0,00011 |
-0,475 |
|
0,01 |
0,00044 |
-0,387 |
|
0,015 |
0,00093 |
-0,295 |
|
0,02 |
0,00156 |
-0,197 |
|
0,025 |
0,00229 |
-0,097 |
|
0,03 |
0,00308 |
6,59·10-3 |
|
0,035 |
0,00389 |
0,111 |
|
0,04 |
0,00467 |
0,217 |
|
0,045 |
0,00539 |
0,322 |
|
0,05 |
0,006 |
0,425 |
|
0,055 |
0,00644 |
0,527 |
|
0,06 |
0,00669 |
0,625 |
|
0,065 |
0,00668 |
0,719 |
|
0,07 |
0,00637 |
0,808 |
|
0,075 |
0,00571 |
0,891 |
|
0,08 |
0,00466 |
0,967 |
|
0,085 |
0,00316 |
1,036 |
|
0,09 |
0,00116 |
1,095 |
|
0,095 |
-0,00138 |
1,145 |
|
0,100 |
-0,00452 |
1,185 |
По данным таблицы 3 построим график
зависимости
![]() =f(Kp)
,т.е укажем границу заданного запаса
устойчивости системы регулирования на
рисунке 3.
=f(Kp)
,т.е укажем границу заданного запаса
устойчивости системы регулирования на
рисунке 3.
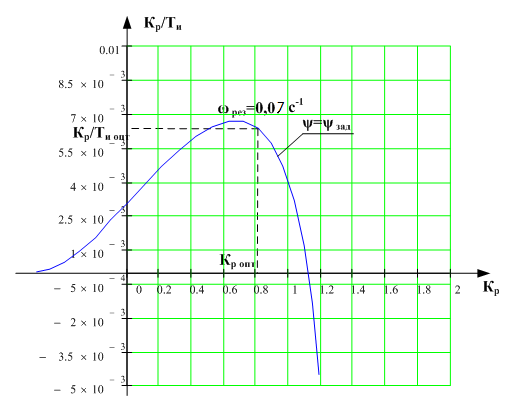
Рисунок 3 - Область параметров настройки ПИ- регулятора
Полученная кривая является линией
заданной степени затухания Ψ=
Ψзад=0,9 процесса
регулирования, что соответствует степени
колебательности m=0.366.
Таким образом, все значения
![]() и Kp
, лежащие на этой кривой, обеспечивают
заданную степень затухания.
и Kp
, лежащие на этой кривой, обеспечивают
заданную степень затухания.
4 Определение оптимальных параметров настройки ПИ-регулятора
Поиск оптимальных параметров настройки регулятора осуществляется вдоль границы заданного запаса устойчивости системы регулирования, представленной на рисунке 3, до достижения экстремума принятого критерия качества. В задании на курсовую работу в качестве принятого критерия качества указан второй интегральный критерий.
Минимуму второго интегрального критерия
![]() на графике (рисунок 3) соответствует
точка 0,95*max
на графике (рисунок 3) соответствует
точка 0,95*max
![]() в сторону большего значения частоты
(«правее максимума»). Эта точка и
определит оптимальные параметры
настройки ПИ- регулятора. Используя
данные таблицы 3 и рисунка 3, находим,
что этой точке соответствуют значения:
в сторону большего значения частоты
(«правее максимума»). Эта точка и
определит оптимальные параметры
настройки ПИ- регулятора. Используя
данные таблицы 3 и рисунка 3, находим,
что этой точке соответствуют значения:
![]() ;
Kp=
0,808;
;
Kp=
0,808;
![]() с;
ωР = 0,07 с-1.
с;
ωР = 0,07 с-1.
5 Расчёт, построение и оценка качества переходных процессов по каналу
регулирующего воздействия S-Y и при возмущении f, идущем по каналу регулирующего воздействия