Вопрос 13. Динамическое описание информационных систем
1. Непрерывно–детерминированные модели (d-схемы)
Математические модели для дискретных систем описываются системой дифференциальных уравнений. При этом неизвестными в модели будут функции одной или нескольких переменных. Чаще всего в этих уравнениях в качестве независимой переменной выступает время, поэтому модели называются D-схемами. При помощи этих моделей описывается поведение электронных систем, систем автоматического управления.
Частными случаями динамических систем, описываемых D-схемами и выделенными в отдельный класс моделей (практическая специфика), являются системы автоматического управления (САУ).
Реальный объект предоставляется в виде двух систем: управляющей и управляемой.
Системы, для которых ошибки управления h(t)=0во все моменты времени, называются идеальными.
Задачей такой системы является изменение переменной y(t) согласно заданному закону с определенной точностью. При проектировании и эксплуатации такой системы необходимо выбрать такие параметры системы S, которые обеспечивали бы требуемую точность управления, устойчивость системы в переходном процессе.
2. Дискретно–детерминированные модели
(F-схемы)
Для формализации процессов функционирования систем используют математический аппарат теории автоматов. На основе этой теории система представляется в виде черного ящика, перерабатывающего входные сигналы в выходные, и имеющего свои внутренние состояния.
Конечный автомат – ящик, у которого множество внутренних состояний и входных сигналов, а соответственно множество и выходных сигналов, являются конечными.
Абстрактный конечный автомат – автомат, представляющий собой конечную математическую схему, характеризующуюся 6 элементами:
–конечным множеством входных сигналов X (входным алфавитом);
–конечным множеством внутренних состояний Z (внутренним алфавитом);
–конечным множеством выходных сигналов Y (выходным алфавитом);
–начальным состоянием z0, являющимся одним из состояний множества Z;
–функцией переходов (z,x);
–функцией выходов (z,x).
Автомат функционирует в дискретном времени, которое представляется последовательностью тактов (интервалов времени, в течение которого состояние входных и выходных сигналов не изменяется).
По числу состояний различают конечный автомат с памятью (1) и без памяти (2).
1. Конечные автоматы с памятью используются для моделирования последовательных схем (схем с памятью), которые имеют 2 и более состояний.
2. Конечные автоматы без памяти имеют одно состояние и используются для моделирования комбинационных схем, выходные состояния которых не зависят от внутреннего состояния системы, а только от входных сигналов y(t)=(x(t)) t=0,1,2…
По характеру отсчета времени автоматы делятся на синхронные и асинхронные. В синхронных F-автоматах моменты времени, в которых происходит считывание входных сигналов, определяются принудительно синхронизирующим сигналом. После очередного синхронизирующего сигнала происходит переход в новое состояние и выдача сигнала на выходе, после чего автомат может воспринимать следующее значение входного сигнала.
Асинхронные автоматы считывают входной сигнал непрерывно, поэтому, реагируя на длинный входной сигнал, он может несколько раз изменять состояние на выходе пока не перейдет в устойчивое состояние, которое уже не может быть изменено этим входным сигналом.
В настоящее время используется 3 способа задания автоматов:
– табличный;
– графический;
– матричный.
На практике автомат всегда является асинхронным, а устойчивость его обеспечивается, например, введением сигналов синхронизации.
1. Автомат Мили:
– табличный способ задания:
|
xi |
zk | ||
|
|
z0 |
z1 |
z2 |
|
Переходы | |||
|
x1 |
z2 |
z0 |
z0 |
|
x2 |
z0 |
z2 |
z1 |
|
выходы | |||
|
x1 |
y1 |
y1 |
y2 |
|
x2 |
y1 |
y2 |
y1 |
графовый способ задания:
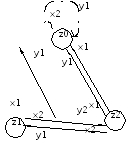
– матричный способ задания:
|
|
|
z0 |
z1 |
z2 |
|
|
z0 |
x2/y1 |
– |
x1/y1 |
|
C1 = |
z1 |
x1/y1 |
– |
x2/y2 |
|
|
z2 |
x1/y2 |
x2/y1 |
|
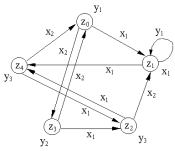
2. Автомат Мура:
табличный способ задания:
|
|
y | ||||
|
xi |
y1 |
y1 |
y3 |
y2 |
y3 |
|
|
z0 |
z1 |
z2 |
z3 |
z4 |
|
x1 |
z1 |
z4 |
z4 |
z2 |
z2 |
|
x2 |
z3 |
z1 |
z1 |
z0 |
z0 |
– матричный способ задания:
|
|
|
z0 |
z1 |
z2 |
z3 |
z4 |
|
|
|
|
|
z0 |
– |
x1 |
– |
x2 |
– |
|
|
y0 |
|
|
z1 |
– |
x2 |
– |
– |
x1 |
|
|
y1 |
|
C = |
z2 |
– |
x2 |
– |
– |
x1 |
|
y = |
y2 |
|
|
z3 |
x2 |
– |
x1 |
– |
– |
|
|
y3 |
|
|
z4 |
x2 |
– |
x1 |
– |
– |
|
|
y4 |
– графовый способ задания: