

Лабораторная работа № 11
1. Дайте определение основных кинематических величин, характеризующих вращательное движение твёрдого тела.
Углова́я ско́рость— векторная величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
![]() ,
,
а направлен по оси вращения согласно правилу буравчика, то есть, в ту сторону, в которую ввинчивался бы буравчик с правой резьбой, если бы вращался в ту же сторону.
Единица измерения угловой скорости, принятая в системах СИ и СГС) — радианы в секунду. В технике также используются обороты в секунду, намного реже — градусы в секунду, грады в секунду. Пожалуй, чаще всего в технике используют обороты в минуту — это идёт с тех времён, когда частоту вращения тихоходных паровых машин определяли, просто «вручную» подсчитывая число оборотов за единицу времени.
Вектор
(мгновенной) скорости любой точки
(абсолютно) твердого тела, вращающегося
с угловой скоростью
![]() определяется
формулой:
определяется
формулой:
![]()
где
![]() —
радиус-вектор к данной точке из начала
координат, расположенного на оси вращения
тела, а квадратными скобками обозначено
векторное произведение. Линейную
скорость (совпадающую с модулем вектора
скорости) точки на определенном расстоянии
(радиусе)rот оси вращения можно
считать так:v = rω.Если вместо радианов применять другие
единицы углов, то в двух последних
формулах появится множитель, не равный
единице.
—
радиус-вектор к данной точке из начала
координат, расположенного на оси вращения
тела, а квадратными скобками обозначено
векторное произведение. Линейную
скорость (совпадающую с модулем вектора
скорости) точки на определенном расстоянии
(радиусе)rот оси вращения можно
считать так:v = rω.Если вместо радианов применять другие
единицы углов, то в двух последних
формулах появится множитель, не равный
единице.
Ине́рция(от лат.inertia—бездеятельность, косность) — явление сохранения скорости тела в случае, если внешние воздействия на него отсутствуют или взаимно скомпенсированы.
Существование явления инерции в классической механике постулируется Первым законом Нью́тона, который также называется Зако́ном ине́рции. Его классическую формулировку дал Ньютон в своей книге «Математические начала натуральной философии»:
«Всякое тело продолжает удерживаться в состоянии покоя или равномерного и прямолинейного движения, пока и поскольку оно не понуждается приложенными силами изменить это состояние.»
Современная формулировка закона:
«Существуют такие системы отсчёта, относительно которых материальная точка при отсутствии внешних воздействий (или при их взаимной компенсации) сохраняет состояние покоя или равномерного прямолинейного движения.»
Системы отсчёта, в которых выполняется закон инерции, называют инерциальными системами отсчёта (ИСО). Все другие системы отсчёта (например, вращающиеся или движущиеся с ускорением) называются соответственно неинерциальными. Проявлением неинерциальности в них является возникновение фиктивных сил, называемых «силами инерции».
2. Связь линейных и угловых параметров вращательного движения.
Отдельные
точки вращающегося тела имеют различные
линейные скорости
![]() .
Скорость каждой точки, будучи направлена
по касательной к соответствующей
окружности, непрерывно изменяет свое
направление. Величина скорости
.
Скорость каждой точки, будучи направлена
по касательной к соответствующей
окружности, непрерывно изменяет свое
направление. Величина скорости![]() определяется
скоростью вращения тела
определяется
скоростью вращения тела![]() и
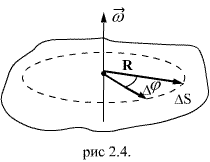
расстоянием R рассматриваемой точки от
оси вращения. Пусть за малый промежуток
времени
и
расстоянием R рассматриваемой точки от
оси вращения. Пусть за малый промежуток
времени![]() тело
повернулось на угол
тело
повернулось на угол![]() (рис
2.4). Точка, находящаяся на расстоянии R
от оси проходит при этом путь, равный
(рис
2.4). Точка, находящаяся на расстоянии R
от оси проходит при этом путь, равный
![]()
Линейная скорость точки по определению.
|
|
(2.6) |
Найдем линейные ускорения точек вращающегося тела. Нормальное ускорение:
![]()
подставляя значение скорости из (2.6), находим:
|
|
(2.7) |
Тангенциальное ускорение
![]()
Воспользовавшись тем же отношением (2.6) получаем
|
|
(2.8) |
Таким образом, как нормальное, так и, тангенциальное ускорения растут линейно с расстоянием точки от оси вращения.