

Описание экспериментальной установки
Общий вид маятника приведен на рис. 4.2. На вертикальной стойке 2 основания 1 крепятся три кронштейна: верхний 3, средний 4 и кронштейн 5 для установки фотодатчика 6.
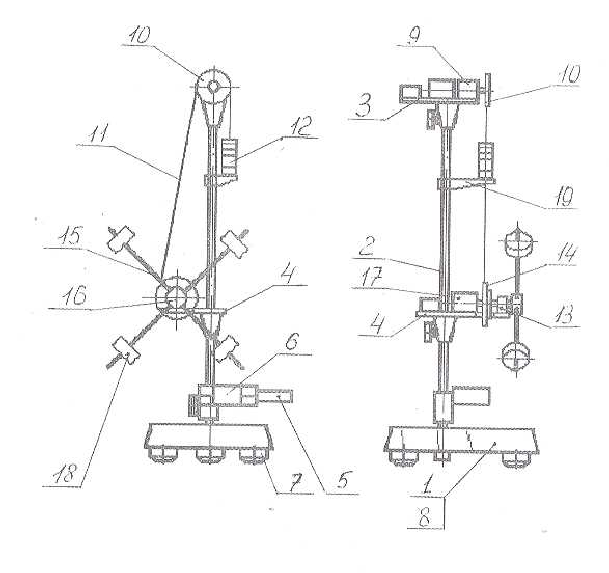
Рис. 4.2.
Основание 1 снабжено тремя регулируемыми опорами 7 и винтом-барашком 8 для фиксации стойки.
Вертикальная стойка 2 выполнена из металлической трубы, на которую нанесена миллиметровая шкала, и имеет визир 19.
На верхнем кронштейне 3 размещается узел подшипников 9 с малоинерционным шкивом 10 изменения направления движения капроновой нити 11, на которой подвешен наборный груз 12. Верхний кронштейн 3 имеет винт-барашек для крепления на вертикальной стойке 2.
На среднем кронштейне 4 размещены: узел подшипников 13, на оси которого с одной стороны закреплен двухступенчатый шкив 14, на котором имеется приспособление для закрепления капроновой нити 11, а с другой стороны находится крестовина, представляющая собой четыре металлических стержня 15, закрепленных в бобышке 16 под прямым углом друг к другу; электромагнитный тормоз 17.
На металлических стержнях 15 через каждые 10 мм нанесены риски.
Грузы 18 закреплены на металлических стержнях 15 и могут свободно перемещаться и фиксироваться на каждом стержне, что дает возможность ступенчатого изменения моментов инерции крестовины.
Электромагнитный тормоз 17 предназначен для фиксации подвижной системы в начале эксперимента, выдачи электрического сигнала начала отсчета времени и торможения подвижной системы после завершения отсчета времени.
Средний кронштейн 4 имеет винт-барашек для крепления на вертикальной стойке 2.
Кронштейн 5 имеет винт-барашек для крепления на вертикальной стойке 2 и элементы фиксации фотодатчика 6.
Методика эксперимента и обработка результатов измерения
Задание 1. Определить момент инерции крестовины.
Зарисовать таблицу 4.1.
Таблица 4.1
|
r1 = 0,02 м; h = м; g = 9,8 м/ с2 | |||||||
|
m1= кг. | |||||||
|
t, c |
|
|
|
|
|
tcp, c |
|
|
m2= кг. | |||||||
|
t, c |
|
|
|
|
|
tcp, c |
|
|
m3 = кг. | |||||||
|
t, c |
|
|
|
|
|
tcp, с |
|
2. Установить подвижные грузы по осям крестовины на расстоянии 100 мм от оси вращения.
3. Закрепить нить на малом радиусе r1 двухступенчатого шкива. Установить на платформу основного груза один разновес.
4. Установить кронштейн с фотодатчиком в нижней части шкалы вертикальной стойки так, чтобы плоскость кронштейна, окрашенная в красный цвет, совпала с одной из рисок шкалы, а наборный груз при движении вниз проходил по центру рабочего окна фотодатчика. За нижнее положение груза берется отметка шкалы, соответствующая риске на корпусе фотодатчика и являющаяся как бы продолжением оптической оси фотодатчика, которую пересекает движущийся груз.
5. Вращая маятник, установить груз в крайнем верхнем положении таким образом, чтобы нижняя плоскость груза (визир вертикальной стойки соприкасается с нижней плоскостью груза) совпала с одной из рисок шкалы вертикальной стойки.
6. Зафиксировать груз в этом положении. Для этого нажать кнопку «СЕТЬ» секундомера, при этом должен сработать фрикцион электромагнитного тормоза.
ВНИМАНИЕ. Для предотвращения перегревания катушки электромагнитного тормоза – время непрерывной работы электромагнитного тормоза - не более 15 секунд, перерыв – 5 секунд.
7. Нажать кнопку «СТАРТ» секундомера. Происходит растормаживание электромагнитного тормоза, груз начинает опускаться и таймер блока начинает отсчет времени. При пересечении грузом оптической оси фотодатчика отсчет времени прекратится. Записать показание таймера, т.е. время движения груза t.
8. При помощи визира по шкале вертикальной стойки определить пройденный грузом путь h, как расстояние от нижней плоскости груза в верхнем положении груза до оптической оси фотодатчика.
9. Повторить измерения по п.п. 5-8 пять раз и определить среднее значение времени. Результаты занести в таблицу 4.1.
10. Определить момент инерции крестовины по формуле (4.16).
11. Аналогичные измерения произвести, установив на платформу основного груза два, а затем три разновеса.
12. Сравнить полученные значения момента инерции крестовины с учетом погрешности. Сделать вывод.
13. Определить теоретическое значение момента инерции крестовины по формуле (4.17) и сравнить с экспериментальными значениями.
14. Определить относительную погрешность полученных значений по формуле:
![]()
15. Повторить выполнение п.п. 5-14, закрепив нить на большом радиусе r2 двухступенчатого шкива. Результаты занести в таблицу 4.2.
Таблица 4.2
|
r2 = 0,035 м; h = м; g = 9,8 м/ с2 | |||||||
|
m1= кг. | |||||||
|
t, c |
|
|
|
|
|
tcp, c |
|
|
m2= кг. | |||||||
|
t, c |
|
|
|
|
|
tcp, c |
|
|
m3 = кг. | |||||||
|
t, c |
|
|
|
|
|
tcp, с |
|
Задание 2. Определение зависимости момента инерции J от расстояния грузов до оси вращения крестовины R.
1. Передвинуть все грузы на один сантиметр к оси вращения.
2. Сделать измерения по пунктам 3-8 задания 1 (используя малый радиус шкива и один разновес на основном грузе).
3. Повторить п.п. 1-2 пять раз. Результаты занести в таблицу 4.3.
4. Определить момент инерции крестовины по формуле (4.16). Проанализировать полученные значения момента инерции крестовины. Сделать вывод.
5. Построить график зависимости J = f(R).
Таблица 4.3
|
r1= 0,02 м ; h= м; | ||||
|
R1= |
R2= |
R3= |
R4= |
R5= |
|
t1 |
t2 |
t3 |
t4 |
t5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t1ср= |
t2ср= |
t3ср= |
t4ср= |
t5ср= |