

ТЕМА 7 . Динам. аналіз мех
..pdfТЕМА 7. ДИНАМІЧНИЙ АНАЛІЗ МЕХАНІЗМІВ
7.1. Задачі
Визначити закон руху ланок механізму за відомими:
кінематичною схемою механізму;
масовими характеристиками ланок;
зовнішніми силами, що діють на ланки механізму.
7.2.Режими руху машини
Розглянемо тахограму руху початкової ланки (рис. 7.1).
Рис. 7.1. Тахограма руху початкової ланки
Упереважній більшості машин робочій процес здійснюється
урежимі усталеного руху, тому що:
tу.р. tр ,tв .
Усталеним рухом називається рух, за якого циклічно змінюється узагальнена координата та її похідні за часом.
Циклом (періодом) усталеного руху називається найменший відрізок часу, по закінченні якого узагальнена координата та її похідні за часом приймають початкове значення.
111
7.3. Рівняння руху механізму у формі кінетичної енергії
Згідно з теоремою про змінювання кінетичної енергії для механізму можна записати:
n |
n |
n |
|
Ti T0i |
Ak , |
(7.1) |
|
i 1 |
i 1 |
k 1 |
|
де Ti - кінетична |
енергія |
i -тої ланки |
в момент часу, |
що розглядається;
T0і - кінетична енергія i -тої ланки в початковий (нульовий) момент
часу;
Ak - робота k - тої сили за відрізок часу від нульового до моменту, що розглядається.
У режимі розбігу:
n |
n |
|
Ti |
T0i . |
(7.2) |
i 1 |
i 1 |
|
У режимі усталеного руху:
n |
n |
|
Ti |
T0i . |
(7.3) |
i 1 |
i 1 |
|
У режимі вибігу: |
|
|
n |
n |
|
Ti |
T0i . |
(7.4) |
i 1 |
i 1 |
|
7.4. Механічний коефіцієнт корисної дії машини
Розрізняють циклічний і миттєвий коефіцієнти корисної дії
(ККД).
7.4.1. Циклічний ККД
Це відношення роботи сил корисного опору до роботи рушійних сил за цикл усталеного руху.
|
Aк.о. |
. |
(7.5) |
|
|||
|
Ар |
|
|
112

У свою чергу:
Ар Ак.о. Аш.о.,
де Аш.о. - робота сил шкідливого опору.
Тоді:
|
Ар Аш.о. |
|
А |
|
|
|
1 |
ш.о. |
1 , |
Ар |
|
|||
|
|
Ар |
||
де - циклічний коефіцієнт втрат.
Аш.о. .
Ар
Отже:
1 .
(7.6)
(7.7)
(7.8)
(7.9)
Циклічний коефіцієнт втрат визначається за формулами або за таблицями, які, в свою чергу, визначаються експериментальним шляхом.
7.4.2. Миттєвий ККД |
|
||
|
Pi |
, |
(7.10) |
|
|||
|
Pj |
|
|
де Pi - миттєва потужність сил, що діють на ведену ланку; Pj - миттєва потужність сил, що діють на ведучу ланку.
7.4.3. ККД машини при послідовному з'єднанні механізмів
Окремі механізми можуть бути з'єднані послідовно, паралельно та комбіновано.
На рис. 7.2 показано послідовне з'єднання механізмів.
Рис. 7.2. Послідовне з'єднання механізмів
113
Відомо, що Aк.о. - циклічний ККД.
Ар
Усвою чергу, для кожного механізму можна записати:
|
А1 |
; |
2 |
|
А2 |
; |
3 |
|
Ак.о. |
. |
(7.11) |
|
|
А |
|
||||||||||
1 |
А |
р |
|
|
|
А |
||||||
|
|
|
1 |
|
|
2 |
|
|
||||
Перемножимо всі ці коефіцієнти:
|
|
|
|
|
А1 |
|
А2 |
|
Ак.о. |
|
Ак.о. |
. |
||
|
|
|
А |
А |
|
|||||||||
1 |
2 |
|
3 |
|
А |
р |
|
|
|
А |
р |
|
||
|
|
|
|
|
|
1 |
2 |
|
|
|
||||
Остаточно:
1 2.... n - |
(7.12) |
загальний ККД машини при послідовному з'єднанні механізмів дорівнює добутку ККД окремих механізмів.
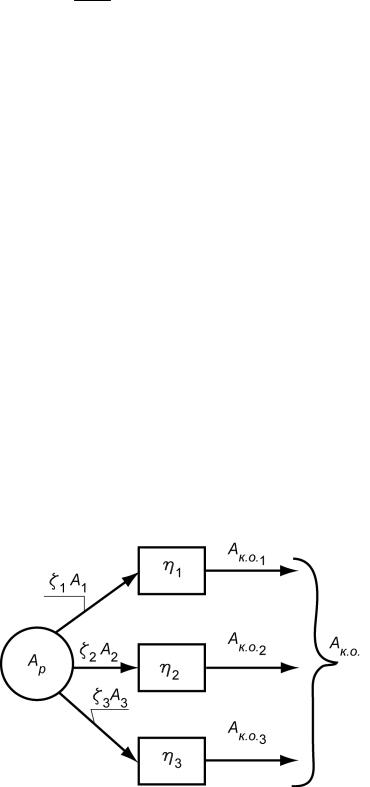
7.4.4. КПД машини при паралельному з'єднанні механізмів
Приклад паралельного з'єднання механізмів наведено на рис. 7.3.
Рис. 7.3. Паралельне з'єднання механізмів
114

Декілька механізмів отримують енергію від спільного джерела.
Тут 1 Ар , 2 Ар , 3 Ар - це частки енергії, які підводяться
до кожного механізму. Тоді:
|
|
|
А |
|
|
|
|
|
|
Ак.о. |
|
|
|
|
|
А |
|
|
|
|
|
|
|
к.о. |
|
|
|
|
|
|
|
2 |
|
|
|
|
к.о. |
|
|||
|
1 |
|
|
1 |
|
|
; 2 |
|
|
|
|
|
; 3 |
|
|
3 |
. |
(7.13) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
1 Ар |
|
|
2 Ар |
|
|
3 Ар |
|
||||||||||
Загальний ККД: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Ак.о. |
|
Ак.о. |
|
Ак.о. |
|
|
|
|
||||||
|
|
|
|
|
1 |
|
|
2 |
|
|
|
3 |
. |
|
|
(7.14) |
||||
|
|
|
|
|
|
|
|
|
Ар |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Виразимо Ак.о. |
1 |
, Ак.о. |
, Ак.о. : |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
2 |
|
3 |
|
|
|
|
|
|
|
|
|
||
Ак.о. |
1 1 Ар; |
Ак.о. |
2 |
2 |
Ар ; |
Ак.о. |
3 3 Ар. |
(7.15) |
||||||||||||
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|||
Після підстановки в загальну формулу та винесення за дужки Ар маємо:
1 1 Ар 2 2 Ар 3 3 Ар Ар ( 1 1 2 2 3 3)
Ар |
Ар |
1 1 2 2 3 3.
Остаточно, при n механізмах:
1 1 2 |
2 |
...... n n. |
(7.16) |
Якщо прийняти, що 1 |
2 |
....... n, то можна записати: |
|
1 |
1 2 |
..... n |
. |
(7.17) |
|
|
|||
|
|
1 |
|
|
Отже: 1, що значно вигідніше, ніж при послідовному з'єднанні механізмів.
7.4.5. ККД машини при комбінованому з'єднанні механізмів
Розглянемо схему комбінованого з'єднання механізмів, наведену на рис. 7.4.
115
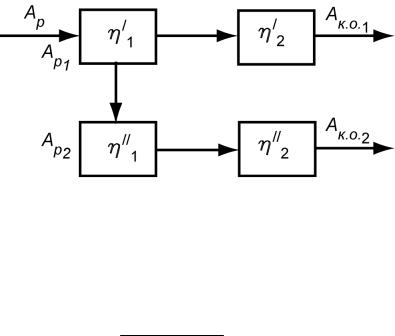
Рис. 7.4. Комбіноване з'єднання механізмів Загальний ККД:
Aк.о.1 Aк.о.2 .
Ар
У свою чергу:
Ар |
|
|
Ак.о.1 |
|
; |
Ар |
|
|
Ак.о.2 |
|
. |
||
|
/ |
|
/ |
/ |
// |
|
// |
||||||
|
1 |
|
|
|
2 |
|
|||||||
|
|
1 |
|
2 |
|
|
|
1 |
1 |
|
2 |
|
|
Але:
Ар Ар1 Ар2 .
Після підстановки у вихідне рівняння маємо:
|
|
|
Ак.о.1 |
Ак.о.2 |
|
|
. |
||||
А |
|
|
|
А |
|
|
|||||
|
|
|
к.о. |
|
|
|
к.о. |
2 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
/ |
|
/ |
/ |
// |
|
// |
|
|
|
|
|
|
|
|
|||||||
1 |
|
2 |
|
1 |
1 |
|
2 |
|
|
||
(7.18)
(7.19)
(7.20)
(7.21)
Підставивши числові дані, можна отримати значення .
7.5. Метод зведення мас і сил
Розглянемо багатоланковий механізм, на ланки якого діють сили (рис. 7.5).
116
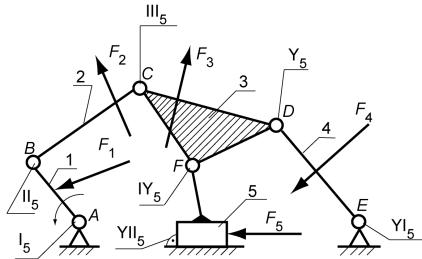
Рис. 7.5. Багатоланковий механізм під дією сил
Відомі:
1.Кінематична схема механізму (КСМ).
2.Масові характеристики ланок.
3.Зовнішні сили, що діють на ланки механізму.
Треба визначити:
1.Лінійні швидкості та прискорення vi ,ai.
2.Кутові швидкості та прискорення i , i.
1. Визначаємо степінь рухомості даного механізму за формулою Чебишева:
n 5; p5 7; p4 0.
W 3n 2p5 p4 3 5 2 7 0 1.
Потрібен 1 двигун.
2. Число рівнянь, які треба скласти для динамічного аналізу, як мінімум, дорівнює числу ланок і більше, якщо є ланки, що здійснюють плоскопаралельний рух (по 2 рівняння).
Отже, для полегшення дослідження механізм однократного степеня рухомості замінюється механізмом 1-го класу (одномасовою системою), динамічно еквівалентним вихідному механізму.
Еквівалентний механізм є складовою частиною заданого механізму. Його рухома ланка називається ланкою зведення.
На рис. 7.6 показані варіанти можливих замін.
117
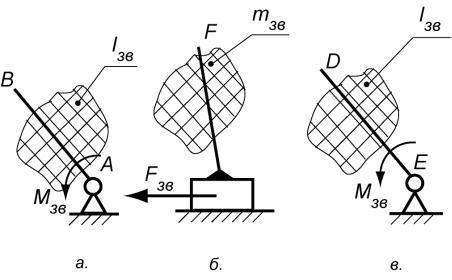
Рис. 7.6. Динамічно еквівалентні механізми
Умови динамічної еквівалентності:
n
1.Tл.зв. Ti
i1
n
2.Pл.зв. Pi
i1
-кінетична енергія ланки зведення дорівнює сумі кінетичних енергій ланок механізму.
-миттєва потужність сил, які прикладені до
ланки зведення, дорівнює сумі миттєвих потужностей усіх сил, що діють на ланки механізму.
Для виконання першої умови до ланки зведення додають
додаткову масу, яка називається зведеною масою (або зведеним моментом інерції), володіючи якою ланка зведення має кінетичну енергію, що дорівнює кінетичній енергії усіх ланок механізму.
Для виконання другої умови до ланки зведення прикладають
зведену силу (зведений момент сили), миттєва потужність якої дорівнює миттєвій потужності усіх сил, що прикладені до ланок механізму.
Після заміни складають рівняння і визначають функції:
v v( ), a a( )і ( ), ( ). |
(7.22) |
118

Ці рівняння визначають закон руху початкової ланки заданого механізму. Кінематичні функції решти ланок визначаються
методами кінематики.
7.6. Зведена маса (зведений момент інерції)
На рис. 7.7 показані варіанти представлення зведеної маси (зведеного моменту інерції).
Рис. 7.7:
а. – зведений момент інерції; б. – зведена маса
Зведена маса (зведений момент інерції) – це розрахункова маса (момент інерції), володіючи якою ланка зведення має кінетичну енергію, яка дорівнює кінетичній енергії всіх ланок механізму.
Відомо, що:
|
|
|
n |
|
|
Тл.зв. |
Ti. |
(7.23) |
|
|
|
|
i 1 |
|
Для ланки зведення можна записати: |
|
|||
|
Iзв |
2 |
n |
|
|
|
Ті , |
(7.24) |
|
2 |
|
|||
|
i 1 |
|
||
119
звідки:
n
2 Ti
Iзв |
i 1 |
, |
(7.25) |
|
2 |
||||
|
|
|
де - кутова швидкість ланки зведення, с-1.
Згадаємо, як визначається кінетична енергія при різних видах руху ланок:
при поступальному русі:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
i |
v2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Ti |
|
|
|
|
|
|
i |
. |
|
|
|
|
|
|
|
|
|
|
|
|
(7.26) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
при обертальному русі: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
0i |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Ti |
|
|
|
|
|
|
|
i |
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
(7.27) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
де I0i |
ISi |
mi los2 |
- момент інерції і |
- тої ланки відносно нерухомої |
|||||||||||||||||||||||||||||||
осі; los - відстань від т. О до т. S. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
при плоскопаралельному русі: |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
m |
i |
v |
2 |
|
|
|
|
I |
Si |
2 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
Ti |
|
|
|
|
|
Si |
|
|
|
i |
, |
|
|
|
|
|
|
|
|
|
(7.28) |
||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
де vSi |
- швидкість центра мас і |
- тої ланки. |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
При сумісному розв'язанні рівнянь усіх цих рівнянь маємо: |
||||||||||||||||||||||||||||||||||
|
i x |
v |
i |
2 |
i y |
|
i |
2 |
|
|
i z |
|
vS |
|
2 |
|
i |
|
2 |
|
(7.29) |
||||||||||||||
Iзв mi |
|
|
I0i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
, |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
mi |
|
|
|
ISi |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
i 1 |
|
i 1 |
|
|
|
i 1 |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
де x - число ланок, які здійснюють поступальний рух; y - число ланок, які здійснюють обертальний рух;
z - число ланок, які здійснюють плоскопаралельний рух.
Загальна кількість ланок:
n x y z. |
(7.30) |
120