1. Кінематичний закон плоскопаралельного руху тіла. Способи подання ппр тіла.
Озн: Плоско-паралел назив. рух тіла при якому усі його точки рухаються у площинах паралельних даній площині
1)
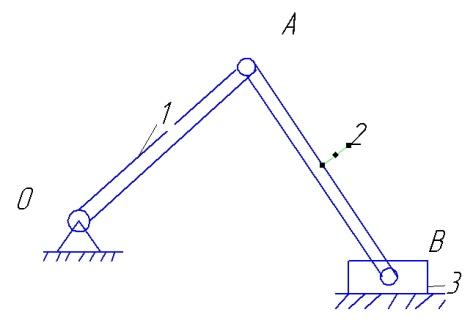
1-кривошип; 2-шатун ППР; 3-поступ рух-повзун

D – ППР S//Axy


 - пост рух
- пост рух
Дослідження тіла D зводиться до дослідження руху перерізу S
O
– полюс
О(х0,y0)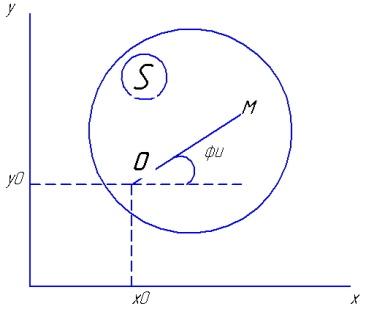
 19.1
19.1

19.1 – Кінематичний закон плоско паралельного руху тіла
(19.1)
 1) Кінематичні характеристики обертального
руху тіла
1) Кінематичні характеристики обертального
руху тіла

2)
Кінематичні характеристики поступального
руху тіла разом з полюсом не залежать
від

3)ППР тв. тіла можна подати як сукупність двох рухів:
поступального руху тіла разом із довільно вибраними полюсами та оберт руху тіла навколо осі, яка проходить через цей полюс.
Оскільки полюс може бути довільний, то вектор кут. швидкості і вектор кут. прискорення тіла будуть вільними векторами у випадку ППР
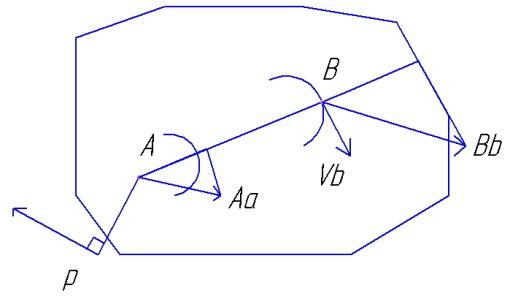
2. Теорема про розподіл швидкостей точок твердого тіла при плоскому русі (з доведенням). Наслiдки.
Теорема: Швидкість будь-якої точки тіла при ППР = векторній сумі швид. довільно вибраного полюса та швид. оберт. руху точки навколо цього полюса.
 (19.2)
(19.2)
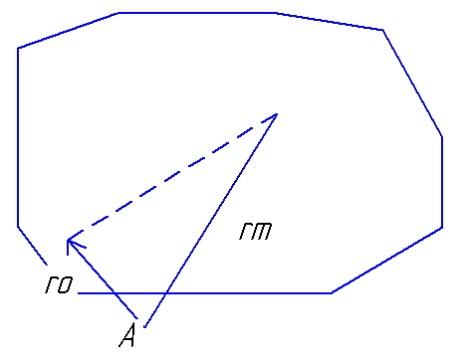

Доведення:(зверху
точка М,
 напрямлене до М,знизу точка О,rm
напрямлене до М)
напрямлене до М,знизу точка О,rm
напрямлене до М)
А
– нерухома точка, S-ППР,
О полюс. Знайти



 (19.3)
(19.3)

Оскільки
 визначає положення відносно полюса О,
визначає положення відносно полюса О, визнач
шв точки М по відношенню до точки О
визнач
шв точки М по відношенню до точки О 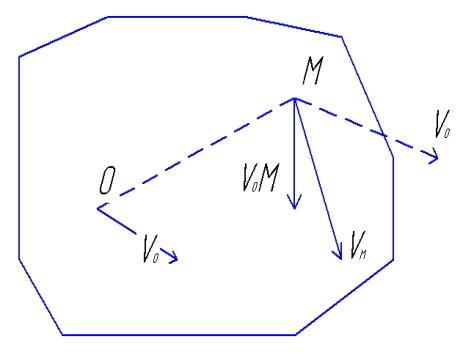

Рух т.М відносно полюса О, можна представити як оберт.


Наслідки:
1)Наслідок 1(теорема Грасгофа)Проекції швидкостей 2 різних точок тіла(яке виконує ППР) на пряму, що їх з’єднує рівні між собою;

А- полюс
Тоді:
 (19.5)
(19.5)

2) У кожен момент часу в площині руху фігури S існує точка, шв якої =0
 P
- МЦШ
P
- МЦШ
Точка Р швид. якої у даний момент часу = 0 назив. миттєвий центр швидкостей. Якщо в цій точці розмістити полюс, то розподіл швидкостей інших точок тіла відповідає оберт. руху тіла навколо цього полюса. Вісь обертання, яка проходить в даний момент часу через точку Р назив. миттєв. вісь обертання. а вектор кут. швид. назив. миттєв. кут. швид. ППР тв. тіла можна представити як сукупність миттевих оберт. рухів навколо МЦШ (мит. центр. швид.)
3. Розподіл прискорення точок тіла при ППР з доведенням. Наслідки. Теорема. Прискорення довільної точки тіла, яке здійснює ППР = векторній сумі прискорення довільної вибраного полюса та прискорення обертального руху точки навколо вибраного полюса. Доведення.
Другий доданок
 .
.
 -
обертальне прискорення
-
обертальне прискорення
 -
доцентрове прискорення точки М при
оберт. Навколо полюса О.
-
доцентрове прискорення точки М при
оберт. Навколо полюса О.
Дійсно.

 =
=
= ..
..
 ;/
;/

Наслідки.
1. ..
.. ..
.. .
. ,
випливає, що кут
,
випливає, що кут не
залежить від вибору точки М і від полюса
О2.Існує
точка в площині руху тіло Д прискор.
якої у даний момент часу =0. Існування
цієї точка можна обґрунтувати за формулою
20.1 …
не
залежить від вибору точки М і від полюса
О2.Існує
точка в площині руху тіло Д прискор.
якої у даний момент часу =0. Існування
цієї точка можна обґрунтувати за формулою
20.1 … Q-
миттєвий центр прискорень. Якщо у цій
точці розмістити полюс, то розподіл
прискорень цих точок відповідає
оберт.руху тіла навколо цього полюса
МЦП
не збігається з МЦШ
Q-
миттєвий центр прискорень. Якщо у цій
точці розмістити полюс, то розподіл
прискорень цих точок відповідає
оберт.руху тіла навколо цього полюса
МЦП
не збігається з МЦШ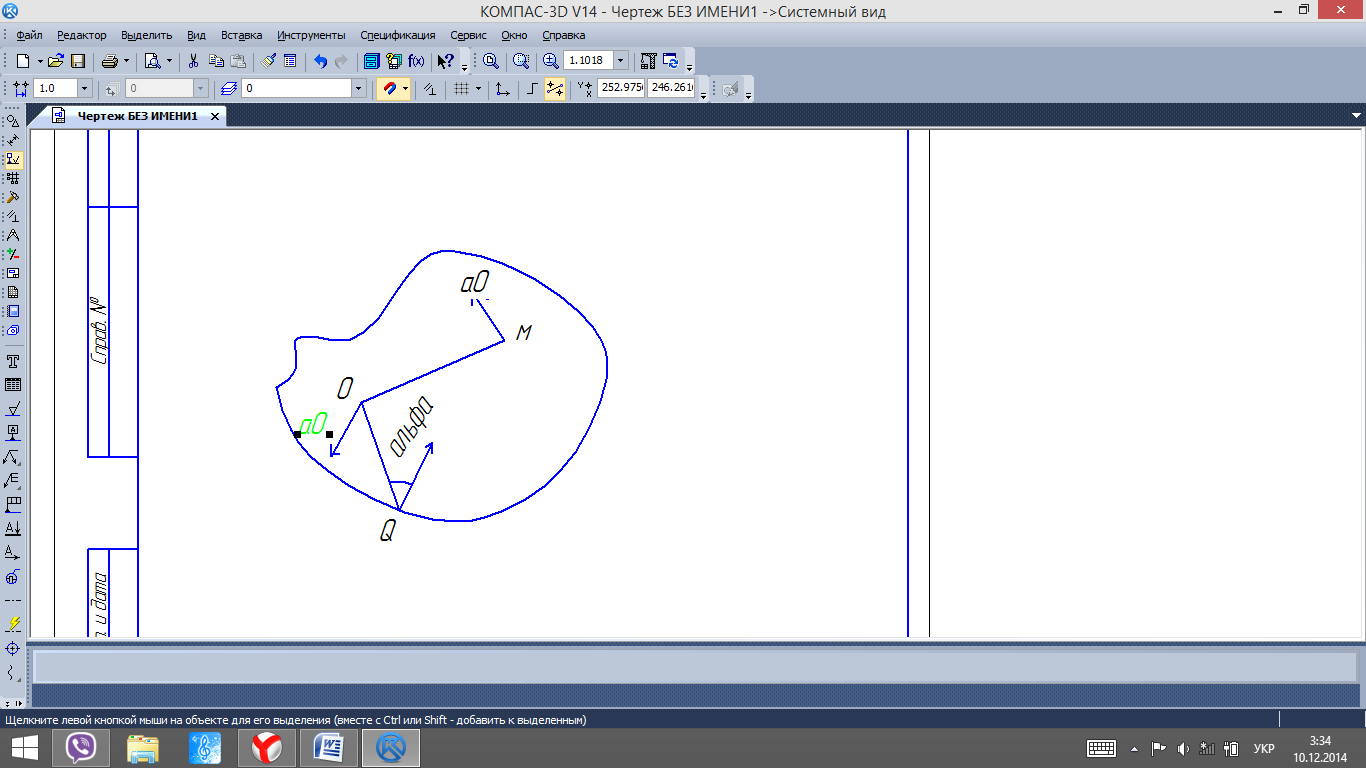
4. Способи визначення мцш та частинні випадки визначення мцш. Теорема про центроiди.
А)
графічний(геометричний спосіб)
S-ППР
Дано:

l-траєкторія:
 є
l
Знайти:
МЦШ S
є
l
Знайти:
МЦШ S
Побудова:
 ’’’’
’’’’ ///
/// ////
////
Б) аналітичний спосіб
S=ППР
Дано:


Р-шуканий МЦШ
Р-полюс
За т-мою:
 ..
..
Проводимо

Відкладаємо на лінії q відрізок РА, який =

Положення точки Р узгоджується з напрямом
 .
.
Частинні випадки знах. МЦШ:
Якщо швидкості 2 точок плоскої фігури напрямлені в один бік і перпендик. До відрізка, що їх з’єднує, МЦШ лежить у точці перетину заданої перпендик прямої ї прямою, яка з.єднує кінці векторів швидкостей певних точок.
Якщо швидкості 2 точок плоскої фігури напрямлені в різні боки і перпендик до відрізка, що з’єднує ці точки, то МЦШ лежить у точці перетину прямої, яка з’єднує кінці векторів швидкостей з наведеним вище відрізком.
Якщо швидкості 2 точок плоскої фігури ІІ та рівні між собою, то МЦШ віддаляється на нескінченну велику відстань. У цьому разі відбув миттєво-поступ рух тіла.
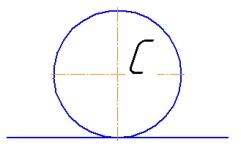
У разі кочення без ковзання рухомого контуру плоскої фігури по нерухомому МЦШ лежить у точці дотику цих контурів.
Цинтроїди
Геометричне місце МЦШ віднесених до нерухом сист корд назив нерухома центроїда
Геом місце МЦШ віднесений до рухомої сист корд назив рухома центроїда
 -нерухома
СК
-нерухома
СК
 -рухома
СК
-рухома
СК
Рухома центроїда- коло R-CP
5.
Способи визначення МЦП
МЦП-
це точка площини руху плоскої фігури
прискорення якої у даний момент часу
=0
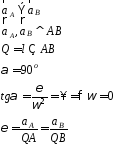
а) графічний спосіб:
 .
Будуємо
це в точці В. Міряєм кут між АВ і
.
Будуємо
це в точці В. Міряєм кут між АВ і
 .
Відкладаєм прямі під кутом від векторів
аА і аВ, точка перетину МЦП.ё
.
Відкладаєм прямі під кутом від векторів
аА і аВ, точка перетину МЦП.ё
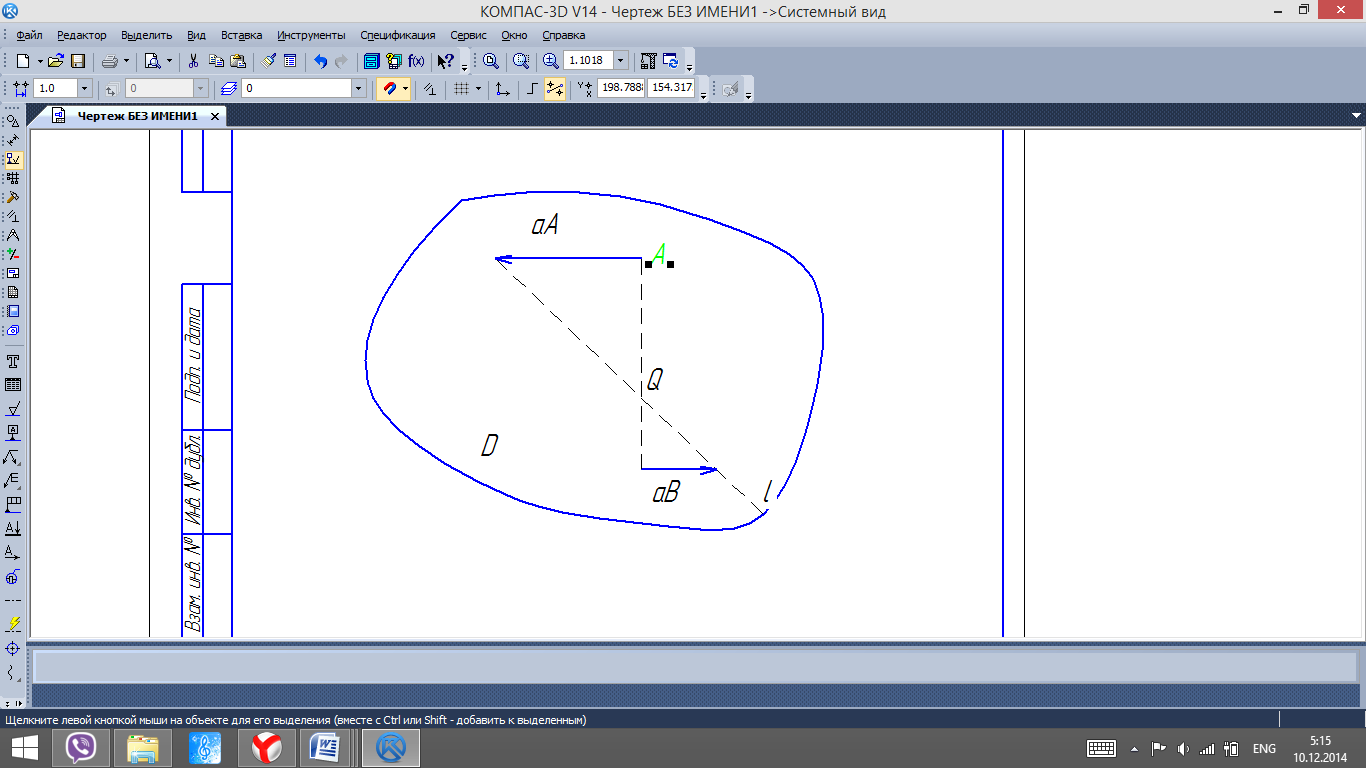
б)
аналітичний спосіб: 1) Визначаємо QA,
де Q
– МЦП, за формулою
 ;
2)Визначаємо альфа з
;
2)Визначаємо альфа з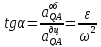 ;
3) Відкладаємо прямуAQ
під кутом
;
3) Відкладаємо прямуAQ
під кутом
 у напрямку узгодженому з вектором ԑ.
Якщо вектор ԑ до нас, то α проти год
стрілки, і навпаки
у напрямку узгодженому з вектором ԑ.
Якщо вектор ԑ до нас, то α проти год
стрілки, і навпаки
Частині випадки
Дано: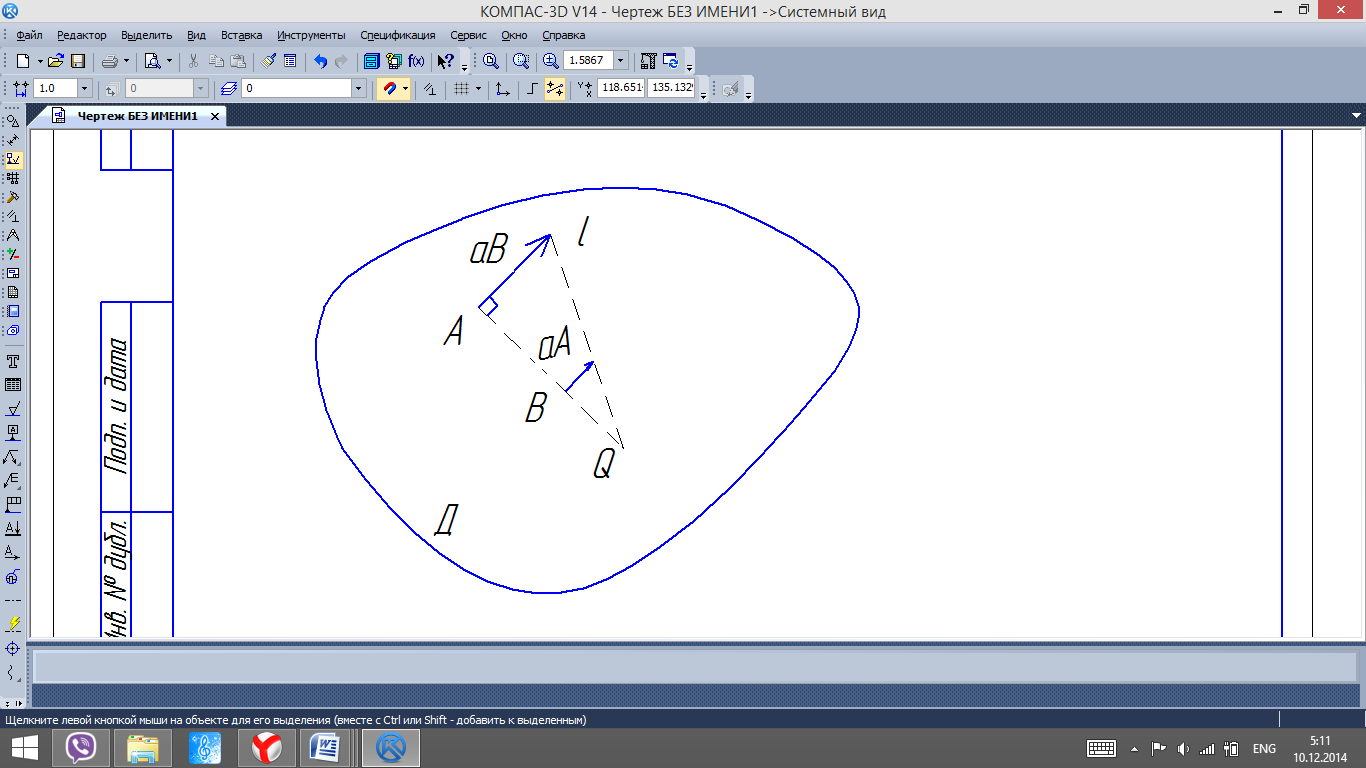
Д-ППР
Збігається з попереднім випадком
Дано:
Д-ППР