

1. Выбор элементов системы
1.1. Анализ структурной схемы системы.
Структурная схема привода представлена на рис.1 ниже:

Рис. 1. Структурная схема приборной следящей системе.
На рисунке обозначены:
ИУ – измерительные устройства.
КУ – последовательное корректирующее устройство.
У – усилитель.
ДВ – двигатель постоянного тока с магнитоэлектрическим возбуждением.
Р – редуктор.
Рассмотрим подробнее каждый из элементов системы.
В качестве двигателя применяется двигатель постоянного тока с возбуждением от постоянных магнитов и гладким якорем. Класс этих двигателей весьма широк. Они отличаются по функциональному назначению, питанию, мощности, энергетическим показателям. Для выбора двигателя необходимо знать энергетические характеристики объекта регулирования.
В качестве измерительных устройств применяются синусно-косинусные вращающиеся трансформаторы.
Усилитель включает в себя предварительный усилитель напряжения, модулятор длительности импульсов, оконечный импульсный усилитель мощности. Каскады усилителей построены на интегральных микросхемах – операционных усилителях.
В системе применяется мостовая схема управления двигателем (закон управления – симметричный). В качестве ключей используются IGBT-транзисторы, управляемые с помощью драйверов.
1.2. Выбор двигателя.
Основными параметрами, которым должен удовлетворять двигатель, являются величины требуемой мощности и напряжение питания.
Величина потребной мощности определим по приближенной формуле
![]() .
.
С учетом исходных данных, получим:
![]()
Исходя из полученного
значения мощности и напряжения питания
![]() выберем, двигатель ДПР-72-Н1/Н2-03.
выберем, двигатель ДПР-72-Н1/Н2-03.
Его технические характеристики приведены в таблице 1.
Таблица 1. Технические данные двигателя ДПР-72-Н1/Н2-03
|
Номинальная мощность, Вт |
17,2 |
|
Номинальная частота вращения, об/мин |
4500 |
|
Номинальный момент, Н·м |
0,04 |
|
Пусковой момент, Н·м |
0,38 |
|
Номинальное напряжение питания, В |
27 |
|
Номинальный ток, А |
1,0 |
|
Сопротивление обмотки якоря, Ом |
2,9 |
|
Момент инерции якоря, Н·м·с2 |
|
|
Электромеханическая постоянная времени, с |
|
|
Электромагнитная постоянная времени, с |
|
|
Срок службы, ч |
1000 |
1.3. Проверка выбранного электродвигателя по номинальному напряжению питания.
Питающее напряжение
для двигателя:
![]() ,
поэтому
,
поэтому
должно выполняться неравенство:
![]() ,
,
![]() верно.
верно.
Тогда питающее напряжение на двигателе с учетом неполного напряжения сети будет равно:
![]()
1.4. Выполним анализ выбранного двигателя дпр-72-н1/н2-03.
Определим пусковой
момент двигателя в системе «Импульсный
усилитель-двигатель:

![]() -напряжение
насыщения транзисторов
-напряжение
насыщения транзисторов
![]() ,
,
![]() -пусковой
момент двигателя.
-пусковой
момент двигателя.
Тогда номинальная скорость двигателя определяется:
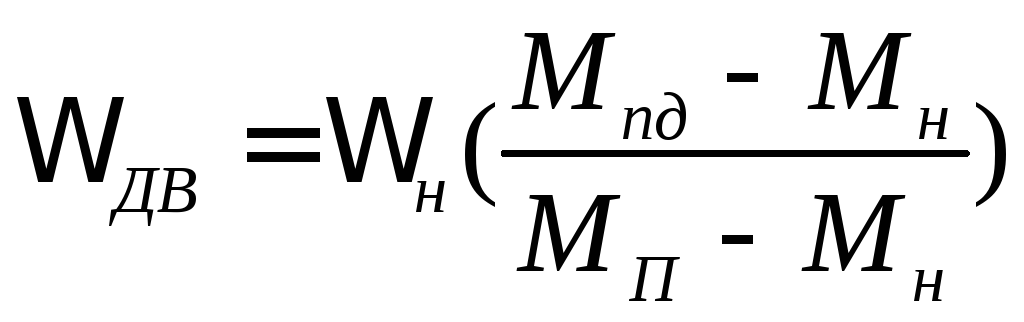
![]() -номинальная
угловая скорость двигателя,
-номинальная
угловая скорость двигателя,
![]() -номинальный
момент нагрузки на двигателе,
-номинальный
момент нагрузки на двигателе,
![]() -пусковой
момент двигателя.
-пусковой
момент двигателя.
![]() рад/с ;
рад/с ;
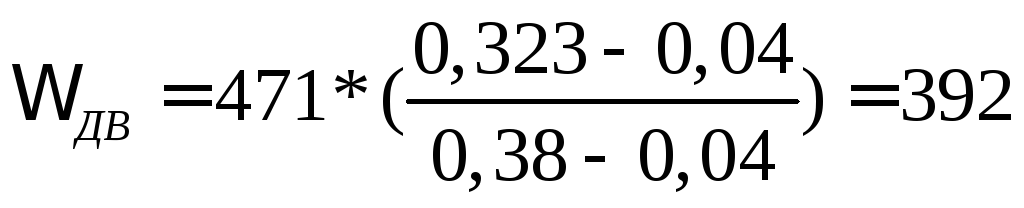 рад/с.
рад/с.
1.5. Выбор информационно-измерительных элементов.
Вращающийся трансформатор широко применяется в счетно-решающих устройствах как прибор, позволяющий производить различные вычислительные операции, которые встречаются при решении задач, связанных с автоматическим управлением каким-либо объектом. Вращающиеся трансформаторы используются для получения выходного напряжения, пропорционального синусу или косинусу угла поворота; для решения тригонометрических задач по вычислению неизвестных величин в прямоугольном треугольнике; для решения задач по преобразованию системы координат. Вращающийся трансформатор применяется так же, как измерительный элемент, с помощью которого можно измерить механическую величину, представленную углом рассогласования в следящих системах, и преобразовать ее в электрическую величину в виде модулированного по амплитуде напряжения переменного тока.
Вращающийся трансформатор будем выбирать исходя из требований по точности. Подходят вращающиеся трансформаторы серии 2,5БВТ. Технические характеристики этого трансформатора приведены в таблице.
Таблица. Технические данные трансформатора 2,5БВТ
|
Тип трансформатора |
Бесконтактный |
|
Номинальное напряжение, В |
12 |
|
Номинальная частота, Гц |
400 |
|
Коэффициенты трансформации: датчика приемника |
0,56 1 |
|
Остаточная ЭДС, % не более |
0,3 |