

ДИНАМИКА
.pdfU m g R2 const . r
Эквипотенциальные поверхности представляют собой сферы: r const . Пусть при r R силовая функция равна нулю:
U U0 0 U m g R2 m g R . r
Потенциальная энергия найдется как
|
m g R2 |
|
|
R |
|
П U m g R |
|
m g R |
1 |
|
. |
r |
|
||||
|
|
|
r |
||
При малом расстоянии от поверхности Земли, равном h, получаем
|
|
R |
|
r R h П m g R |
1 |
|
|
R h |
|||
|
|
Здесь принято, что
|
|
h |
|
m g R |
|
|
||
|
R h |
|
m g h
.
R R h .
б. Потенциальная энергия пружины
(рис. 3.8.6)
Пусть в точке M0 пружина нерастянута, тогда
F r c r r0 .
Элементарная работа силы пружи- |
|
|
|
|
||
ны равна: |
|
|
|
|
|
|
A c r r0 d r . |
|
|
Рис. 3.8.6 |
|||
Силовая функция этой силы: |
|
|
|
|
|
|
U c r r0 |
d r |
c r r0 2 |
|
c 2 |
||
|
|
, |
||||
2 |
2 |
|||||
|
|
|
|
|||
где r r0 .
Потенциальная энергия пружины найдется как П c 2 .
2
50

3.9. ЗАКОН СОХРАНЕНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ
Пусть все действующие на систему силы как внешние, так и внутренние потенциальны, т.е.
n
AFk d П .
k 1
По теореме о кинетической энергии в дифференциальной форме имеем
n
dT AFk d П
k 1
или
d T d П 0.
Иначе
T П E const .
Сумма кинетической и потенциальной энергии называется механической
энергией.
При движении механической системы в потенциальном поле внешних и внутренних сил полная механическая энергия системы остается постоянной величиной.
Механические системы, для которых выполняется этот закон, называются
консервативными.
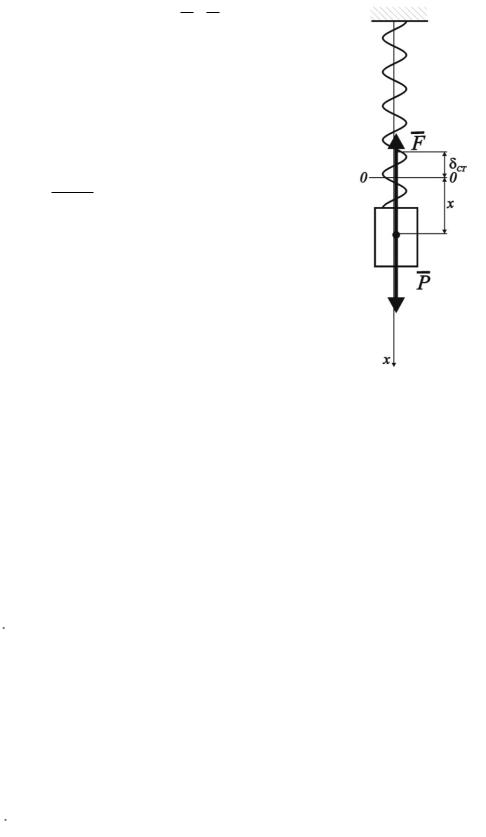
Пример
Груз массой m подвешен на пружине жесткости c (рис. 3.9.1). В начальный момент покоящемуся грузу сообщена скорость v0 . Найти закон изменения скорости в зависимости от координаты.
Решение
1.Рассмотрим движение груза. Начало координат выберем в положении статического равновесия груза.
2.Заданные силы P, F; P m g , F c x ,
где – статическое удлинение пружины под действием силы тяжести груза:
|
m g |
|
m g |
|
|
|
|
F c x |
|
|
c x P . |
c |
|
||||
|
|
c |
|
||
51
3.Связей нет.
4.Груз движется под действием сил: F ,P .
5.Для решения задачи воспользуемся законом сохранения механической энергии
T П T0 П0 .
Начальное значение кинетической энергии
T m v02 . |
|
0 |
2 |
|
|
Начальное значение потенциальной энергии складывается из потенциальной энергии груза ПP 0, если поверхность нулевого уровня взять в положении статического равновесия, и потенциальной энергии пружины, которая найдется как
ПF |
c 2 |
|
|
|
|
|
Рис. 3.9.1 |
|
|
. |
|
|
|
|
|
||
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
c 2 |
m2 g 2 |
|
m2 g 2 |
||
П0 ПP ПF 0 |
|
c |
|
|
|
. |
||
2 |
c2 |
|
||||||
|
|
|
|
|
c |
|||
Текущие значения кинетической и потенциальной энергий:
|
T |
m x2 |
|
, П m g x |
c x 2 |
. |
|
|||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
||||
В итоге имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
m x2 |
m g x |
c x 2 |
|
|
mv02 |
|
c 2 |
, |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
2 |
|
|
||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
m x |
2 |
|
|
|
|
c x2 |
|
|
|
|
|
|
mv2 |
|
||||||||
|
|
|
|
|
|
m g x |
|
c x |
|
|
0 |
, |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
x2 |
|
|
|
m g c |
c x2 |
|
2 |
|
|
v02 . |
|
||||||||||||
|
x |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
m |
|
|
|
|
|
||||
Подставляя значение , получаем
52

|
2 |
|
|
|
|
c m g |
|
c x2 |
|
2 |
|
2 |
|
|||||
x |
|
x m g |
|
|
|
|
|
|
|
|
|
|
v0 . |
|||||
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
c |
|
2 |
|
m |
|
|
|
||||
Окончательно будем иметь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
c x2 |
|
|
|
|
|
|
|
|
|
|||||||
x2 v2 |
|
|
2 |
|
x v2 |
|
c |
x2 . |
||||||||||
|
|
|
||||||||||||||||
|
|
0 |
2 |
|
m |
|
|
|
|
|
0 |
|
|
m |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ОГЛАВЛЕНИЕ |
|
Введение................................................................................................................ |
1 |
1.1. Основные понятия и законы динамики ........................................................ |
2 |
1.2. Дифференциальные уравнения движения точки......................................... |
4 |
2.1. Центр масс. Статические моменты ............................................................... |
9 |
2.2. Моменты инерции ........................................................................................ |
12 |
2.3. Моменты инерции относительно параллельных осей. |
|
Теорема Гюйгенса-Штейнера......................................................................... |
15 |
2.4. Осевые моменты инерции тел простейшей формы .................................. |
16 |
3.1. Количество движения материальной точки и механической системы .................... |
19 |
3.2. Теоремы о количестве движения ................................................................ |
20 |
3.3. Кинетический момент точки и механической системы ........................... |
26 |
3.4. Теоремы о кинетическом моменте.............................................................. |
30 |
3.5. Работа и мощность силы.............................................................................. |
35 |
3.6. Кинетическая энергия точки и механической системы............................ |
38 |
3.7. Теоремы о кинетической энергии ............................................................... |
41 |
3.8. Потенциальное силовое поле. Потенциальная энергия............................ |
44 |
3.9. Закон сохранения механической энергии .................................................. |
51 |
53