

ДИНАМИКА
.pdf3.4. ТЕОРЕМЫ О КИНЕТИЧЕСКОМ МОМЕНТЕ
Теорема о кинетическом моменте точки
Рассмотрим движение механической системы Ak n материальных то-
чек в инерциальной системе отсчета |
|
||||||||||
Oxyz (рис. 3.4.1). Пусть |
|
e |
|
|
|
|
|
|
|
||
F |
n |
внешние |
|
||||||||
|
|
|
k |
|
|
|
|
|
|||
и |
|
i – внутренние силы, действующие |
|
||||||||
F |
|
||||||||||
|
k n |
|
|
|
|
|
|
|
|||
на точки системы. Точка Ak массой mk |
|
||||||||||
|
|
|
e , явля- |
|
|||||||
движется под действием силы |
F |
|
|||||||||
|
|
|
|
|
|
|
k |
|
|||
ющейся равнодействующей внешних сил, |
|
||||||||||
действующих на данную точку, и |
|
i , яв- |
|
||||||||
F |
|
||||||||||
|
|
|
|
|
|
|
|
|
k |
|
|
ляющейся равнодействующей внутренних |
Рис. 3.4.1 |
||||||||||
сил, действующих на данную точку, ak – |
|
||||||||||
ускорение точки. |
|
|
|
|
|
|
|
||||
Запишем для точки Ak системы основное уравнение динамики
mk ddvtk Fke Fki
и умножим его векторно слева на радиус-вектор rk :
|
|
|
|
|
|
m |
|
d vk |
r |
|
|
|
|
|
|
|
|
||||
|
|
|
r |
|
|
|
F |
e r |
|
F i . |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
k |
|
|
k |
|
d t |
|
|
k |
|
k |
k |
|
k |
|||
Преобразуем левую часть полученного уравнения: |
|||||||||||||||||||||
|
|
rk mk |
|
d v k |
|
|
d |
|
rk m k vk |
d rk |
m k vk . |
||||||||||
|
|
|
d t |
|
d t |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d t |
||||||
Но |
d rk |
mk v k v k m k v k 0 как векторное произведение коллине- |
|||||||||||||||||||
|
|||||||||||||||||||||
|
d t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
арных векторов.
30
В итоге получаем
|
|
|
|
|
rk mk v k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
||
|
|
d |
|
d kO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
rk Fke rk Fki momO Fk , |
||||||||||||||||||||||||||||||
|
|
d t |
|
|
d t |
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k 1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
d kO |
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
mom |
O Fk , |
|
|
|
|
|
(3.4.1) |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
d t |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Проецируя (3.4.1) на оси координат, найдем |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
d k |
|
|
n |
|
|
d k y |
|
n |
d k |
|
|
|
n |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
x |
|
momx Fk ; |
|
|
momy Fk ; |
z |
|
momz Fk ; (3.4.2) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
d t |
|
|
|
d t |
|
|
|
|
|
||||||||||||||||||||||||
|
|
k 1 |
|
|
|
k 1 |
|
d t |
k 1 |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Формулы (4.1) и (4.2) выражают теорему о кинетическом моменте точ-
ки: производная по времени от кинетического момента точки относительно
какого-либо центра или оси равна сумме моментов сил, действующих на точку относительно того же центра или оси.
Теорема о кинетическом моменте механической системы относительно неподвижного центра
Записав теорему об изменении кинетического момента для всех точек системы и сложив полученные выражения, получим
|
|
|
|
|
|
|
|
n |
|
|
|
|
|
|
|
n |
|
|
|
n |
|||||
|
|
|
|
|
|
|
|
d kO |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
mom |
O Fke momO Fki . |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
k 1 |
d t |
k 1 |
|
|
|
k 1 |
||||||||||||
|
|
В этом выражении: |
|
|
|
|
|
|
|
|
|
||||||||||||||
n |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
d kO |
|
d |
|
d KO |
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
O |
|
||||||||||||||||||||
k |
– производная кинетического момента механи- |
||||||||||||||||||||||||
|
|
|
|||||||||||||||||||||||
k 1 |
d t |
d t k 1 |
|
|
d t |
|
|
|
|
|
|
|
|
|
|||||||||||
ческой системы относительно центра O ;
n
momO Fke LOe – главный момент внешних сил системы относительно
k 1
центра O ;
n
mom O Fki LOi 0 – главный момент внутренних сил системы.
k 1
31
Окончательно имеем
|
|
|
|
|
|
|
d KO |
|
|
e |
|
||
|
|
|
||||
|
|
|
L . |
(3.4.3) |
||
|
|
|
||||
d t |
|
O |
|
|||
|
|
|
|
|||
Спроецировав (4.3) на оси координат получим:
d K |
x |
L e |
; |
d K y |
L e |
; |
d K |
z |
L e. |
(3.4.4) |
|
|
|
|
|
||||||
d t |
|
x |
|
d t |
y |
|
d t |
|
z |
|
|
|
|
|
|
|
|
|
Здесь L ex , L ey , L ez – главные моменты внешних сил системы относи-
тельно осей координат.
Формулы (3.4.3) и (3.4.4) выражают теорему об изменении кинетического момента механической системы или теорему о кинетическом моменте механической системы в дифференциальной форме: производная по времени от
кинетического момента механической системы относительно какого-либо неподвижного центра или оси равна главному моменту внешних сил системы относительно того же центра или оси.
Из этой теоремы можно, как следствие, получить законы сохранения ки-
нетического момента.
1.Если главный момент внешних сил системы относительно центра равен нулю, то кинетический момент системы относительно этого центра постоянен по модулю и направлению:
|
|
e |
0 |
|
|
|
const . |
|
L |
K |
O |
(3.4.5) |
|||||
|
O |
|
|
|
|
|
||
2.Если главный момент внешних сил системы относительно какойлибо оси равен нулю, то кинетический момент системы относительно этой оси остается постоянным:
Le |
0 |
K |
z |
const . |
(3.4.6) |
z |
|
|
|
|
32
Пример 1
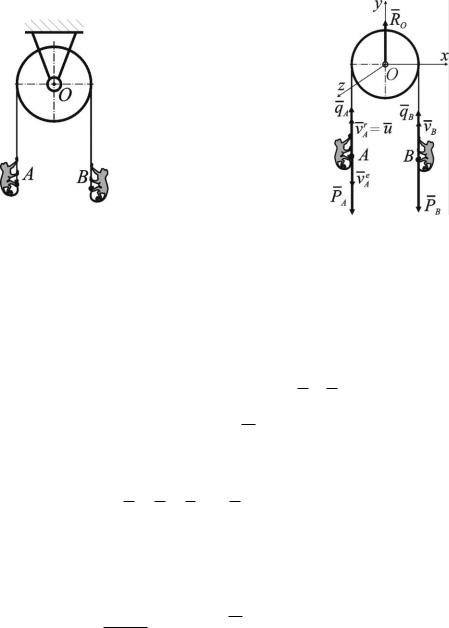
Через блок, массой которого пренебрегаем, перекинут канат, за концы которого ухватились две обезьянки A и B одинакового веса (рис. 3.4.4). Что произойдёт с обезьянкой B , если обезьянка A станет подниматься по канату со скоростью u относительно каната?
а |
б |
Рис. 3.4.4
Решение
1.Рассмотрим движение механической системы (блок, канат, обезьянки) в
пространстве основания.
2.Заданные внешние силы: силы тяжести обезьян, PA ,PB ; PA PB P .
3.Связи: подшипник O блока. Его реакция RO .
4.Механическая система движется под действием сил
PA ,PB ,RO , Fki n ,
5.Применим теорему о кинетическом моменте системы относительно оси z вращения блока
|
n |
d K z mz Fke 0. |
|
d t |
k 1 |
|
|
Следовательно,
Kz const , так как Kz0 0 Kz 0 .
Составим кинетический момент системы относительно оси z :
Kz Kz A Kz B ,
33

где Kz A и Kz B – моменты количеств движения обезьянок относительно оси блока.
Количество движения обезьянки B : qB Pg vB .
Чтобы найти количество движения обезьянки A, представим её движение в пространстве основания сложным, связав подвижную систему отсчёта с канатом, модуль скорости которого равен vB .
По теореме сложения скоростей имеем
|
|
|
v |
A |
v r v e |
, |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
A |
A |
|
|
|
|
|
|
|
||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v r |
|
, a v e v . |
|
|
|
|
||||||||||
|
|
u |
|
|
|
|
||||||||||||
|
|
|
A |
|
|
|
|
|
A |
B |
|
|
|
|
||||
Проецируя векторное равенство на ось y , найдём |
|
|
|
|||||||||||||||
v |
|
u v ; |
q |
|
|
|
|
P |
u v |
|
, |
|||||||
A y |
A y |
|
|
B |
||||||||||||||
|
|
|
B |
|
|
|
|
g |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
тогда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Kz mz qA mz qB ; |
|
|
|
|
||||||||||||
Kz |
|
P |
u vB r |
P |
vB r 0. |
|||||||||||||
|
|
|||||||||||||||||
|
|
|
g |
|
|
|
|
|
|
|
g |
|
|
|
|
|||
Откуда получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u 2 vB 0 vB |
u |
|
и vA u vB |
u |
. |
|||||||||||||
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
Т.е. скорости обезьянок в пространстве основания одинаковы и равны u 2 . Как висели они одна напротив другой, так и будут подниматься вверх. Только одна при этом работает, а другая просто катается.
2 . Как висели они одна напротив другой, так и будут подниматься вверх. Только одна при этом работает, а другая просто катается.
34
3.5. РАБОТА И МОЩНОСТЬ СИЛЫ
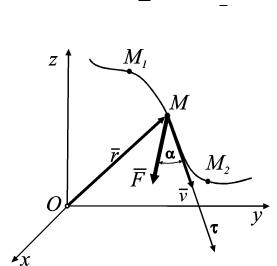
Рассмотрим движение точки M под действием силы F . Пусть r – ради- ус-вектор точки относительно начала
системы отсчета Oxyz (рис. 3.5.1). Для характеристики действия
силы на материальную точку на протяжении некоторого пути, пройденного точкой, вводится мера этого действия, называемая работой силы.
Элементарная работа силы –
величина равная скалярному произведению вектора силы на вектор
d r элементарного перемещения Рис. 3.5.1 точки приложения силы:
|
|
|
|
|
|
|
A Fds cos , |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
A F cos d F d , |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
A F d r |
|
A F dx F dy F dz, |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
x |
y |
z |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A F v d t. |
|
|
|
|
|
|
|
||||
Здесь – угол между силой и скоростью точки, |
d s |
|
|
d r |
|
– путь, прой- |
||||||||||||
|
|
|||||||||||||||||
денный точкой за время d t , |
d – |
приращение дуговой координаты точки, |
||||||||||||||||
Fx , Fy , Fz – проекции силы на оси координат. |
|
|
|
|
|
|
|
|
||||||||||
Работой силы на конечном перемещении M0 M называется интеграл |
||||||||||||||||||
от элементарных работ на этом перемещении |
|
|
|
|
|
|
|
|
||||||||||
M |
M |
x |
|
y |
z |
t |
|
|
||||||||||
AM0M |
|
|
|
|
|
|||||||||||||
A F |
d r Fx d x Fy d y Fz d z F v d t F d . |
|||||||||||||||||
M0 |
M0 |
x0 |
|
y0 |
z0 |
t0 |
|
0 |
||||||||||
35
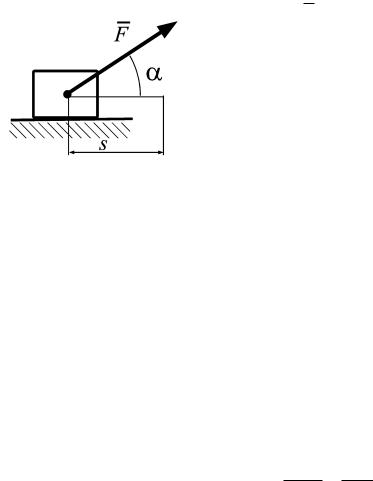
Если F const и путь прямолинеен (рис. 5.2), то можем записать
|
A F s cos . |
|
Размерность работы силы |
|
A Н м=Дж. |
|
Мощность (работоспособность) силы – отно- |
Рис. 3.5.2 |
шение элементарной работы к промежутку време- |
|
ни, в течение которого эта работа совершена:
|
|
|
W |
|
v F v cos , |
||
|
A |
|
F |
||||
W |
|
|
|
|
|
|
|
d t |
W Fx x Fy y Fz z , |
||||||
|
|
W F |
v |
. |
|||
|
|
|
|
|
|
|
|
t
A W d t .
t0
Размерность мощности
W Н м = Дж =Вт .
с с
В качестве единицы мощности часто используют лошадиную силу:
1 л.с. = 735,5 Вт = 0,7355 кВт.
Очевидно, что работа и мощность системы сил равна сумме работ и мощностей сил системы.
Примеры вычисления работы
Р а б о т а с и л ы т я ж е ст и
Силу тяжести тела вблизи поверхности Земли считаем постоянной
(рис. 3.5..3):
Px Py 0, Pz m g .
При перемещении точки из положения M1(x1,y1,z1) в положение
M2(x2,y2,z2):
36

|
Ap Px d x Py d y Pz d z Pz d z m g d z . |
При перемещении точки из положе- |
|
ния M1(x1,y1,z1) в положение M2(x2,y2,z2): |
|
Ap Px d x Py d y Pz d z |
|
|
Pz d z m g d z . |
z2 |
z2 |
A 1,2 m g d z m g d z m g z . |
|
z1 |
z1 |
Работа силы тяжести не зависит от формы пути и равна произведению веса тела на изменение высоты центра тяжести.
Рис. 3.5.3
Р а б о т а с и л ы у п р у г о ст и
Будем рассматривать линейную силу упругости (рис. 3.5.4), когда
Fx c x x0 ,
где x0 – длина недеформированной пружины. Тогда элементарная работа
A Fxd x F d x c x x0 d x .
Рис. 3.5.4
Полная работа силы упругости пружины
x2 |
|
|
c x x |
|
2 |
|
x2 |
2 |
2 |
|
||
|
|
|
||||||||||
|
|
|
|
|||||||||
A1,2 |
c x x0 |
d x |
|
|
|
|
c x2 |
x1 |
||||
0 |
|
|
|
|
|
|
|
|
, |
|||
2 |
|
|
|
|
|
2 |
|
|||||
x1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
37
где x1, x2 – деформации пружины в начальном и конечном положениях движущегося тела.
Мощность пары сил, приложенной к твердому телу
Как известно, главный вектор пары сил P ,Q равен нулю, а главный
момент пары сил есть момент пары.
Тогда мощность пары сил запишется как
WPQ mPQ .
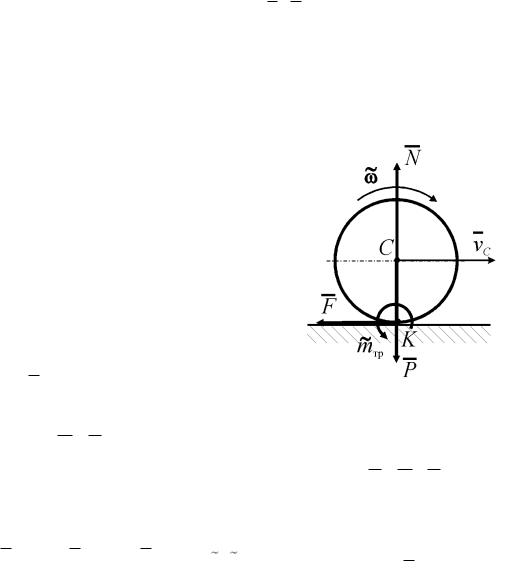
Пример: однородный диск радиуса r катится без проскальзывания по горизонтальному основанию, имея скорость центра vC и испытывая сопротивление качению. Коэффициент трения качения k . Масса диска m . Найти мощность сил, приложенных к диску.
Решение
1.Рассмотрим движение диска относительно неподвижного основания.
2.Заданная сила: P m g .
3.Связь: шероховатая, деформируемая поверх-
ность. Её реакции: ~
N , F , m.
Диск движется под действием системы внешних сил
а) Находим сумму мощностей сил приложенных к диску:
Рис. 3.5.5
~
P , N , F , m
WP vC N vK F vK m k N k m g vr .
3.6.КИНЕТИЧЕСКАЯ ЭНЕРГИЯ ТОЧКИ
ИМЕХАНИЧЕСКОЙ СИСТЕМЫ
Рассмотрим движение механической системы Ak n точек в простран-
стве инерциальной системы отсчета Oxyz. Пусть mk – масса точки Ak , vk – ее скорость.
38

Кинетической энергией точки назовем скалярную величину равную половине произведения массы точки на квадрат ее скорости
|
m v2 |
||
T |
k k |
. |
|
2 |
|||
|
|
||
Кинетическая энергия системы материальных точек определяется как сумма кинетических энергий точек системы
|
1 |
n |
|
T |
mk vk2 . |
||
|
|||
|
2 k 1 |
||
Кинетическая энергия всегда положительная величина. Размерность ки-
нетической энергии T кг м2 .
с2
Кинетическая энергия твердого тела
Для твердого тела можем записать
T |
1 |
v2 d m . |
|
2 |
|||
|
M |
Здесь M – масса тела, dm – масса элементарного объема, v –скорость этого объема.
Рассмотрим частные случаи движения твердого тела.
1 . П о ст у п ат е ль н о е д в и ж е н и е
Здесь все точки тела движутся одинаково со скоростью центра масс, поэтому
T |
M v2 |
||
C |
. |
||
2 |
|||
|
|
||
2 . В р а щ е н и е т ел а в о к р у г н е п о д в и ж н о й о с и (рис. 3.6.1)
|
1 |
|
|
|
1 |
|
|
2 |
|
1 |
|
T |
|
M |
v2 |
d m |
|
M |
2 h2 d m |
2 M h2 |
d m |
|
Iz 2 . |
2 |
2 |
2 |
39