

ОГЛАВЛЕНИЕ
АННОТАЦИЯ………………………………………………………………….…..……2
ВВЕДЕНИЕ……………………………………………………….…..…….4
1.ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ……………………….……..…..5
2.РАСЧЕТ МОМЕНТОВ СТАТИЧЕСКИХ СОПРОТИВЛЕНИЙ
И ПРЕДВАРИТЕЛЬНЫЙ РАСЧЕТ МОЩНОСТИ
ЭЛЕКТРОДВИГАТЕЛЯ……………………………….…………….…….7
3.ВЫБОР ЭЛЕКТРОДВИГАТЕЛЯ…………………………..……..……14
4.ВЫБОР РЕДУКТОРА………………………………………………..….16
5.ПРИВЕДЕНИЕ СТАТИЧЕСКИХ МОМЕНТОВ И МОМЕНТОВ
ИНЕРЦИИ К ВАЛУ ДВИГАТЕЛЯ……………………………....…..17
6.ПРЕДВАРИТЕЛЬНАЯ ПРОВЕРКА ДВИГАТЕЛЯ ПО
НАГРЕВУ И ПРОИЗВОДИТЕЛЬНОСТИ…………………………...22
7.ВЫБОР ПРЕОБРАЗОВАТЕЛЯ………………………………………....26
8.РАСЧЕТ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
ЭЛЕКТРОПРИВОДА………………………………………………....28
ЗАКЛЮЧЕНИЕ………………………………………………………...28
БИБЛИОГРАФИЧЕСКИЙ СПИСОК……………………………...….29
ВВЕДЕНИЕ
Современные многоэтажные здания для облегчения и ускорения перемещения людей и грузов на различные уровни по высоте оборудуют средствами вертикального транспорта. Их основное преимущество - небольшая площадь, занимаемая его оборудованием в здании. Из всех видов подъемников, применяемых в жилых, административных и производственных зданиях, наиболее распространены лифты.
Лифт представляет собой подъемное оборудование, обслуживающее два или более этажей, включающее кабину для транспортировки пассажиров и/или других грузов, которая движется между жесткими направляющими, расположенным вертикально или с отклонением от вертикали не более чем на 15°.
Лифты появились как подъемные устройства на простой веревке или цепи лебедок. Лифт раньше представлял из себя платформу, которую тащат либо толкают механическим способом. Современный лифт состоит из кабины, которая устанавливается на платформу в закрытом помещении, называемом шахтой лифта. В прошлом, привод лифта приводился в движение от паровых и водонагревательных гидравлических поршней. В "тянущемся" лифте, кабина тянется при помощи стальных канатов скользящих по глубоко нарезанному ролику, также называемому шкивом или катушкой. Вес кабины балансируется противовесом. Иногда два лифта могут синхронно двигаться в противоположных направлениях, и они являются друг для друга противовесами.
К проектированию, изготовлению, монтажу и техническому обслуживанию лифтов в процессе эксплуатации предъявляются жесткие требования, сформулированные Правилами устройства и безопасной эксплуатации лифтов (ПУБЭЛ), утвержденными постановлением Федерального горного и промышленного надзора (Госгортехнадзором России) от 16.05.2003 № 31.
1.Задание на курсовую работу
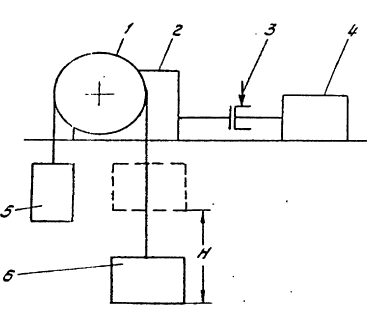
Рисунок 1 – Кинематическая схема грузового лифта:
1 – канатоведущий шкив; 2 – редуктор; 3 – тормозной шкив; 4 – двигатель
5-клеть; 6-противовес.
Грузовой лифт
выполняет операцию перемещения груза
с нижней площадки на верхнюю. Вниз клеть
может спускаться как без груза, так и с
грузом. Цикл работы включает в себя
времена подъёма и опускания клети, а
также времена загрузки и выгрузки.
Подъём клети происходит с установившейся
скоростью
 а опускание со скоростью
а опускание со скоростью .
.
В процессе расчёта необходимо выбрать наиболее тяжёлый режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъём и спуск.
Таблица 1.1 – Технические данные механизма грузового лифта.
|
Обозначение |
Наименование показателя |
Размерность |
Величина |
|
|
Масса груза |
т |
3,2 |
|
|
Масса клети |
т |
5,5 |
|
|
Масса противовеса |
т |
7 |
|
|
Диаметр шкива |
м |
0,25 |
|
h |
Высота подъёма |
м |
7 |
|
|
Скорость подъёма |
м/с |
0,25 |
|
|
Ускорение допустимое |
м/с2 |
0,5 |
|
z |
Число циклов |
1/ч |
40 |
|
tP |
Время работы |
с |
70 |






2.Расчет моментов статических сопротивлений и предварительный расчет мощности
ЭЛЕКТРОДВИГАТЕЛЯ
Расчёт
времён работы на каждом участке работы
лифта. Время пуска
 до установившейся скорости с допустимым
ускорением, торможения
до установившейся скорости с допустимым
ускорением, торможения от установившейся скорости до остановки
от установившейся скорости до остановки
 ,
(2.1)
,
(2.1)
где
 - заданная скорость движения, м/с;
- заданная скорость движения, м/с;
а - допустимое ускорение, м/с2.
В соответствии с формулой (2.1) при движении вперед
tп1=tm1= =0,5
с.
=0,5
с.
При движении назад
tп2=tm2= =0,5с.
=0,5с.
Путь, проходимый рабочей машиной за время пуска и торможения
 (2.2)
(2.2)
В соответствии с формулой (2.2) при движении вверх
Lп1=Lm1= =
= =0,06
м.
=0,06
м.
При движении вниз
Lп2=Lm2= =
= =0,06
м.
=0,06
м.
Время
установившегося режима движения со
скоростью

 (2.3)
(2.3)
где L – высота подъёма груза, м.
В соответствии с формулой (2.3) для движения вверх
ty1= =
= =27.5
c.
=27.5
c.
Для движения вниз
ty2= =
= =27.5c.
=27.5c.
Найдём время паузы
to =tp-2∙tп1-2∙tп2-2∙ty=70-2∙0.5-2∙0.5-2∙27.5=13с.
Расчёт статических моментов рабочей машины.
Момент сил трения в подшипниках барабана:
 ,
(2.4)
,
(2.4)
где
 - масса деталей и узлов, опирающихся на
подшипники, кг;
- масса деталей и узлов, опирающихся на
подшипники, кг;
 - диаметр шейки
вала или оси, м;
- диаметр шейки
вала или оси, м;
 - коэффициент
трения скольжения в подшипниках;
- коэффициент
трения скольжения в подшипниках;
 - ускорение силы
тяжести.
- ускорение силы
тяжести.
В соответствии с формулой (2.4) момент сил трения в подшипниках барабана:
При движении лифта с грузом
Мтп1= =
= =115.51
Нм.
=115.51
Нм.
При движении лифта без груза
Мтп2= =
= =91,97
Нм.
=91,97
Нм.
Момент силы тяжести:
 ,
(2.5)
,
(2.5)
где m - масса поднимаемого или опускаемого груза, кг;
D – диаметр шкива, м.
В соответствии с формулой (2.5) момент силы тяжести:
При движении лифта вверх
Mст1= =
= 2084
Нм.
2084
Нм.
При движении лифта вниз
Mст2= =
= 1839
Нм.
1839
Нм.
По заданию курсового проекта необходимо обеспечить подъем клети лифта с грузом и движение вниз клети без груза.
Суммарный статический момент рабочего органа:
При движении лифта вверх:
Mрост1=Mст1+Мтп1=2084+115,51=2199 Нм.
При движении лифта вниз:
Mрост2=Mст2+Мтп2=1839+91,97=1930 Нм.
Расчёт динамических моментов рабочей машины:
Определим момент инерции рабочего органа по формуле (2.6):
 (2.6)
(2.6)
При движении с грузом:
Jpo1=Jш+(mг+mк+mп)∙ =0,4+(3200+5500+7000)∙
=0,4+(3200+5500+7000)∙ 245.7
кг∙м2
245.7
кг∙м2
При движении без груза:
Jpo2=Jш+(mк+mп)∙ =0,4+(5500+7000)∙
=0,4+(5500+7000)∙ 195,7
кг∙м2
195,7
кг∙м2
При заданной величине допустимого ускорения определим динамические моменты лифта при движении.
При движении с грузом:
Mродин1=Jpo1∙ =245.7∙
=245.7∙ =982.8Нм;
=982.8Нм;
При движении без груза:
Mродин2=Jpo2∙ =195,7∙
=195,7∙ =782,8Нм;
=782,8Нм;
Полный момент рабочей машины найдём по формуле (2.7):
 .
(2.7)
.
(2.7)
Первый участок – разгон лифта при подъёме груза
Мpo1=Mрост1+Мродин1=2199+982,8=3181 Нм;
Второй участок – равномерное движение лифта с грузом
Мро2=Мрост1=2199 Нм;
Третий участок – торможение лифта при подъёме груза
Мро3=Мрост1-Мродин1=2199-982,8=1217 Нм;
Четвертый участок – время паузы

Пятый участок – разгон лифта при опускании клети
Мро5=Мрост2+Мродин2=1930+782,8=2712Нм;
Шестой участок – равномерное движение лифта без груза
Мро6=Мрост2=1930 Нм;
Седьмой участок – торможение лифта при опускании клети
 Мро7=Мрост2-Мродин2=1930-782,8=1148
Нм.
Мро7=Мрост2-Мродин2=1930-782,8=1148
Нм.
По рассчитанным значениям моментов на каждом участке можно найти среднеквадратичное значение момента:
 (2.8)
(2.8)
где
 - момент наK-м
участке, Нм;
- момент наK-м
участке, Нм;
 - длительность
K-го
участка, с.
- длительность
K-го
участка, с.
Получаем значение момента:
Мсркв= =2075Нм;
=2075Нм;
Тогда мощность двигателя определяется по формуле
Рдв=k1∙Mсркв∙ =1.5∙2075∙
=1.5∙2075∙ =6395
=6395 (2.9)
(2.9)
где
 =1.3…1.5
- коэффициент, учитывающий динамические
нагрузки, обусловленные вращающимися
элементами электропривода, то есть
двигателем, редуктором, а также потери
в редукторе;
=1.3…1.5
- коэффициент, учитывающий динамические
нагрузки, обусловленные вращающимися
элементами электропривода, то есть
двигателем, редуктором, а также потери
в редукторе;
Dб – диаметр колеса тележки, м;
 - основная скорость
движения, м/с;
- основная скорость
движения, м/с;
 - фактическое
значение относительной продолжительности
включения проектируемого привода
- фактическое
значение относительной продолжительности
включения проектируемого привода
 (2.10)
(2.10)
В соответствии с формулой (2.10)
 .
.
 - ближайшее к ПВф
каталожное значение относительной
продолжительности включения для
электродвигателей выбранной серии.
Фактическое значение ПВ рассчитаем,
зная длительность времени работы tK
на всех
участках движения к заданному времени
цикла:
- ближайшее к ПВф
каталожное значение относительной
продолжительности включения для
электродвигателей выбранной серии.
Фактическое значение ПВ рассчитаем,
зная длительность времени работы tK
на всех
участках движения к заданному времени
цикла:
 ,
(2.11)
,
(2.11)
где z= 40 число циклов работы машины в час.

Для двигателей краново-металлургической серии ряд ПВ: 15, 25, 40, 60, 100%. Выбираем ближайшее ПВ, то есть ПВкат=60.
Предварительные нагрузочные диаграммы приведены на рисунке 2.1.