

Связью по току.
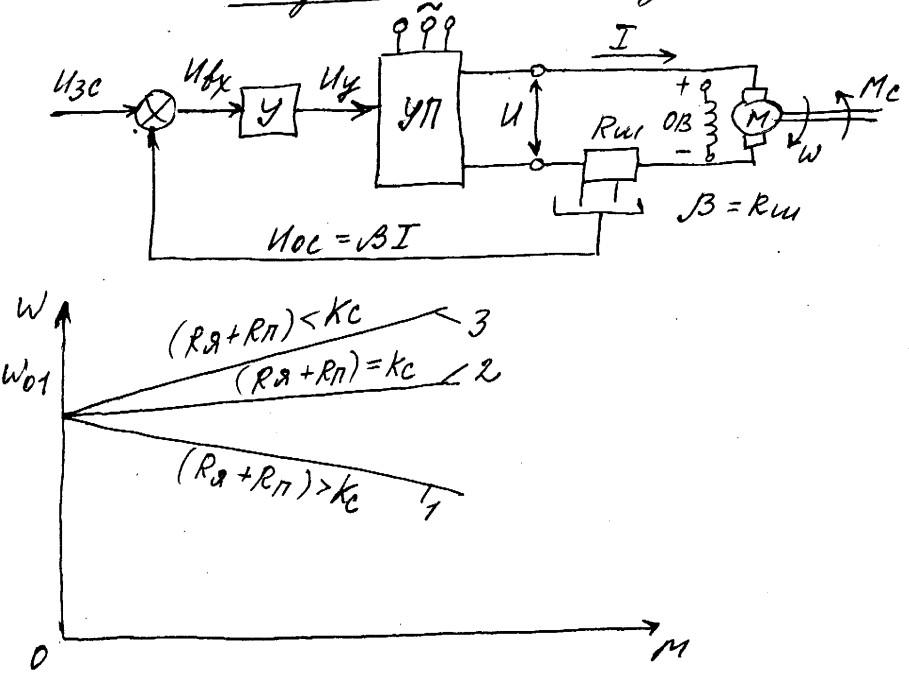
Датчиком обратной связи является шунт с сопротивлением Rш. Падение напряжение на
шунте пропорционально току якоря. Сигнал обратной связи
Uос βI .
Где β – коэффициент обратной связи по току (определяется в Омах). Сигнал на вх усилите- ля определяется как: Uвх = Uзс+βI
ω
к
П
U
У

R Я
R П I
кФП
кФП
ω
к
П
U
У

R Я
R П M
кФП
(кФП )
UУ= кУ Uвх = кУ (Uзс+βI)
2
ω
к
П
к
У
UЗС
к
П
к
УβI
R
Я
R
П
I

кФП
кФП
ω
к
П
к
У
UЗС
кC
I
R
Я
R
П
I


c c c
ω
k
П
k
У
UЗС
(R
Я
R
П
kС
)
I

ЭМХ
с с
ω
k
П
k
У
UЗС
(R
Я
R
П
kС
)
M

МХ
с с2
Анализ жесткости полученных характеристик проводится используя суммарное сопро-
тивление якорной цепи (Rя+Rп) с общим коэффициентом усиления Кс.
– отрицательная жесткость (Rя+Rп)>Кc
– бесконечно большая жесткость (Rя+Rп)=Кc 3 – положительная жесткость (Rя+Rп)<Кc
С помощью ПОС по току можно получить характеристики любой жесткости.
18
Частотное регулирование скорости асинхронного двигателя.
Принцип заключается в том, что, изменяя частоту f1 питающего напряжения, можно в
соответствии с выражением
ω0 2πf1 / p
изменять его скорость 0, получая различные ис-
кусственные характеристики. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а получаемые характеристики обладают высокой жесткостью. Регули- рование скорости АД не сопровождается увеличением его скольжения, поэтому потери мощности при регулировании скорости оказываются небольшими. Для лучшего использо- вания АД и получения высоких энергетических показателей его работы - коэффициентов мощности, полезного действия, перегрузочной способности - одновременно с частотой не- обходимо изменять и подводимое к АД напряжение. Закон изменения напряжения при этом зависит от характера момента нагрузки Мс.
При постоянном моменте нагрузки Мс=const напряжение на статоре должно регулиро- ваться пропорционально его частоте U1/f1=const
Для вентиляторного характера момента нагрузки это соотношение имеет вид
U1/ f 2 const, а при моменте нагрузки, обратно пропорциональном скорости, оно запи-
1

шется в виде
U1/
f1 const
При реализации частотного способа регулирования скорости АД должен быть исполь-
зован преобразователь частоты, который позволяет также регулировать и напряжение на статоре АД.
Схема включения АД и характери- стики. Необходимым элементом ЭП яв- ляется преобразователь 1 частоты и на- пряжения, на вход которого подается стандартное напряжение сети U1 про- мышленной частоты f1= 50 Гц, а с его выхода снимается переменное напряже- ние U1peг регулируемой частоты f1рег (рис. 5.14,а), значения которых нахо- дятся между собой в определенных со- отношениях.
Анализ механических характери- стик АД при его управлении по наиболее простому закону U1/f1=const показывает, что ско-
рость 0 идеального холостого хода АД изменяется при регулировании f1, а критический момент Мк остается неизменным.
Механические характеристики (рис. 5.14,6) по своим особенностям разделяются на два семейства: характеристики, соответствующие частотам ниже номинальной (сетевой) f1ном и выше ее.
Закон
изменения
напряжения
при
частотном
регулировании
скорости
АД
в
относительных
единицах:
U1* f1*
Mс* .
19