

2Π fi
p
магнитопровода;
Не учитывается влияния пространственных и вре- менных высших гармонических составляющих (мдс).
Ген. Дв.
sкр. экстерум
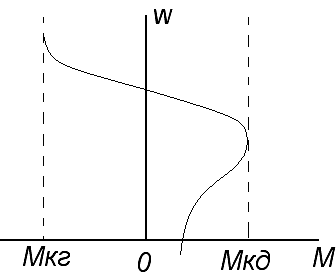
Механические характеристики АД.
Для вывода мех-их хар-ик необходимо рассматривать
-Mк.г.
1 0 Mк.д. M
s
баланс мощности на основе энер-
гетических диаграмм.
Для вывода мех-ой хар-ки при- нимаем следующие допущения:
Ввиду малости активного со- противления статора (для машин средней и большой мощности принимаем ∆РЭЛ1=0.
Учитывая, что магнитные потери в АД значительно ниже электриче-
ских ∆РМ1=0, ∆РМ2=0.
Ур-ие электромеханической хар-ки: М = f(I).
3I`2 R`
M
2 2Σ
sω0
ЭМХ; Из ур-ия следует, что для определения зависи-
мости моментов от скольжения необходимо знать хар-ку I’2(S).
11
I' (s)
UФ
, Х – индуктивное сопротивление КЗ. Х
=Х +Х’
2 2
R'2Σ
R
КЗ
X 2
К 1 2
1 S KЗ
Ур-ие представляет собой скоростные хар-ки АД, т.к. скольжение однозначно определяет
3U2 R`
величину скорости. Уравнение механической хар-ки: M
Ф 2Σ
2
МХ
R`2Σ 2
ω0sR1
XK

s
Макс-ое значение момента, развиваемого дв-ем называется критическим. Соответствующее
S
R`2Σ M
3U2
скольжение называется критическим. K
;
R 2 X2
Ф
K 2ω R
R 2 X2
1 K 0 1 1 K
Знаки
±
означают,
что
максимум
момента
может
иметь
место:

а) при s>0 (+) в двигательном режиме и режиме противовключения. б) при s<0 (-) в генераторном режиме.
«+» - двигательный режим; «-» - генераторный. При работе в генераторном режиме с реку-
перацией энергии момент критический больше, чем в двигательном режиме или режиме
Ф
3U2
Ф
M 
; M
3U2
противовключения.
KГ 2ω R
R 2 X2
KД 2ω R
R 2 X2
0 1 1 K
0 1 1 K
Формула Клосса: M
2MK (1 a sK )
s
.Упрощенная M
2M
K

s
Таким образом,
s K K s
s

2a sK
s K K s
s
зная каталожные данные АД, можно построить MX и ЭМХ.
Электромеханические характеристики АД.
Типы ЭМХ: 1. Зависимость тока от скольжения I1(s), 2. I’2(s).
I'2
UФ

2
R'2Σ
R
1
X 2
S KЗ
I' UФ
При
s∞
ток
ротора
I’2
стремится
к
предельному
значению:
Когда s>0, то I’2(s) монотонно возрастает. Если s<0 – имеется максимум.
2ПР ЕД
2 X2
K
R
1
s<0
I’2
MAX
I'2
max

UФ ; XК
smax Г
R'2Σ
R1
1
a
I’2 ПРЕД
s>0
Ток ротора I’2 явл-ся основной величиной для оценки ре- жима работы Д.
SГЕН. MAХ
I
Для выражения I1(s):
I1

2 I'2 (12α
I
2
μ
1a
2s2 )
K
где
α μ
I'2ПП
коэф-т кратности тока Iμ по отнош-ию к I’
2пр.
12
Уравнения электромеханической и механической характеристики асинхронного двигателя. Искусственные характеристики асинхронного двигателя.
Уравнение электромеханической характеристики: М = f(I).
3I `2 `2
R
M
2 2
ЭМХ;
s0
Уравнение механической характеристики:
3U 2 R`
M Ф 2
2
R`
- МХ
2
0 sR1
2
X K
s 
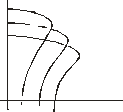
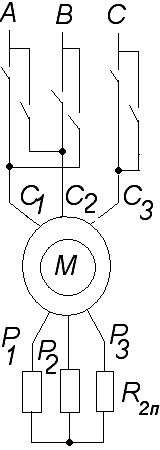
Искусственные характеристики АД
Включение дополнительного R Изменение U
в ротор АД (Rд<R1<R2<R3)
s s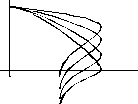

0 0
Rд=0
R1
sК 2
R
1 R3 1
U2 U1 UH
U2
>
U1
>
UH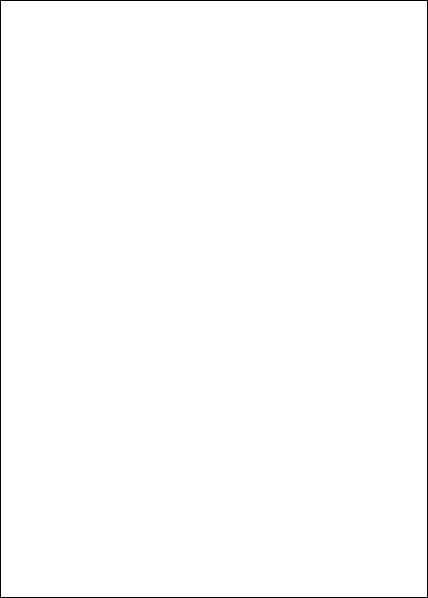
|
Изменение Х (реактивного |
Изменение частоты питающего |
U/f = const (одновременно |
|
сопротивления в статоре, ХН < Х1 < Х2 < Х3)U |
(з-н Костенко) fH > f1 > f2. |
изменяется U и f) |

s s ест
fH
x2
f1
x1
xH
f2
M
MK
1 1
M M
13
Тормозные режимы асинхронного двигателя.
Рекуперативное тор-е с отдачей энергии в сеть возможно при скорости выше синхрононой скорости маг. Поля. По мере приближения к этой скорости момент дв-ля стремится к нулю, при дальнейшем увеличении под влиянием внешнего момента, когда ω > ω0 – дв-ль работа- ет в режиме генератора параллельно с сетью отдавая ей Эл. Энергию. При работе АД в ре- жиме рекуперации не следует вкл-ть в его цепи дополнительные сопротивления, т.к. это ве- дет к увеличению потерь и снижению КПД. Этот вид используют для подтормаживания.

Торможение противовключением . Условия этого тор-я:
Ротор дв-ля под действием акт. Момента приложенного к валу должен вращаться в про- тивоположном направлении отн-но поля статора. Тормозной ток составляет 7..8 Iном, по- этому необходимо ограничивать тормозной ток в пределах допустимой величины. Метод используется в реверсивных приводах и приводах требующих быстрой остановки.
при пассивном статическом моменте, кот. Не способствует вращению, осущ-ся торможе- ние на «выбеге» - переключает чередование фаз.
С целью уменьшения тормозного тока и увеличения тормозного момента в цепь ротора вкл- ся дополнит. Сопротивления, Однако при этом способе необходимо затормозить Д или откл-ть его от сети иначе произойдет реверс.
для осущ-я динамического тор-я АД статор откл-ся от сети переменного тока и подкл. К
постоянному напр-ю. В режиме динамического торможения неподвижное маг. Поле АД обусловлено суммой намагничивающей силы ОС и ОР. Этот режим тор-я можно рассмат- ривать как своеобразный режим работы АД:
а) ОС при вкл-ии к источнику пост.тока создает неподвижную в пространстве МДС с сину- соидальным распределением вдоль воздушного зазора.
б) амплитуда этой МДС опр-ся не только постоянным током, но и схемой соединения фаз ОС.
14
Системауправляемыйпреобразователь-двигательсотрицательнойобратнойсвя- зьюпо скорости.
Основу структурной схемы составляет разомкнутая схема УПД. На валу ДПТ находится
датчик скорости - тахогенератор ТГ (рис. 11.23, а), выходное напряжение которого
UТГ
, пропорциональное скорости ДПТ, является сигналом обратной связи. Коэффици-
ент пропорциональности носит название коэффициента обратной связи по скорости и может регулироваться за счет изменения тока возбуждения ТГ.
Сигнал обратной связи
UТГ UОС
сравнивается с задающим сигналом скорости Uз.с с и их
разность Uвх= Uз.с - Uтг в виде сигнала рассогласования (ошибки) Uвх подается на вход до- полнительного усилителя У, который с коэффициентом ky усиливает сигнал рассогласова- ния Uвх и подает его в виде сигнала управления Uу на вход преобразователя П.
Uу = Кy Uвх .
Жесткость характеристик в
замкнутой системе больше же- сткости характеристик в ра- зомкнутой системе. Сами харак- теристики, показанные на рис. 11.23, б, , а линии 1 и 3 соответ- ствуют замк системе. Здесь же для сравнения приведена харак- теристика ДПТ в разомк (парал- лельные линии 2, 4 и 5) системе.
Рассмотрим физическую сторо- ну процесса регулирования ско- рости в данной системе. Пред- положим, что ДПТ работает под нагрузкой в установившемся режиме и по каким-то причинам увеличился момент нагрузки Мс. Так как развиваемый ДПТ момент стал меньше момента
нагрузки, его скорость начнет снижаться и соответственно будет снижаться сигнал обрат- ной связи по скорости. Это вызовет увеличение сигналов рассогласования и управления и приведет к повышению ЭДС преобразователя, а следовательно, напряжения и скорости ДПТ. При уменьшении момента нагрузки обратная связь действует в другом направлении.
Таким образом благодаря наличию обратной связи происходит автоматич регулирование ЭДС преобразователя и тем самым подводимого к Дв напряжения.
Для вывода мех хар-ки ДПТ в замкнутой системы, воспользуемся выражениями:
ω E П
кФП
IR Я R П
кФП

к П U у
кФП
R Я R П
кФП
I ω0 Δω
(1)
ω E П
кФП
R Я R П
(кФ
)2

П
M
к П U у
кФП
R Я R П
(кФ
)2
П
M ω0 Δω
(2)
Uвх=
Uз.с
–
γω (3)
Uу
=
Кy
Uвх (4)
Заменяем в (1) и (2) Uу на его выраж в (4) и далее Uвх из (3):
Uу = Кy (Uз.с – γω)
15
к к U
γω R
R
ω П У ЗС Я П I
кФП
кФП
ω к
П
к
У
UЗС
к
П
к
У
γω
к
П
к
У
UЗС
к
П
к
У
γω


0 кФ
П
кФП
кФП
Введем обозначения
С = кФП, Кс = γ Кy КП / С
к П к У UЗС
ω0

C
к к U
K C ω
R
ω
П
У
C
ЗС K
C ω -
Я I C
(1а)
ω
к
П
к
У
UЗС
C
K C ω -
R Я M C2
(2а)
ω1 k
к П к У UЗС - R Я I
C C C

ω1 k
к П к У UЗС - R Я M
C C C

Окончательно получается:
ω
k
У
k
П
UЗ.С.
I(RЯ R П )
ЭМХ;


ω k У k П U З.С.
M(R Я R П )
2
МХ
c(1k C )
c(1k C )
c(1k C )
c (1k C )
где
c kФном ;
kС γk У k П /с
общий коэффициент усиления системы П-Д.
16
Системауправляемыйпреобразователь-двигательсотрицательнойобратнойсвя- зьюпо напряжению.
2, 4 , 5 – замкнутая система; 3 - разомкнутая
Датчиком напряжения служит потенциометр. Сигнал обратной связи
Uос αU .
Где α – коэффициент обратной связи. Сигнал рассогласования
Uвх
Uзс αU .
ω
к
П
ФU
У

I R Я
R П
кФП
кФП
Uу = Кy Uвх = Кy (Uз.с – γω)
ω
к
П
к
У
UЗС
γωI
R
Я
R
П
;

ω
к
П
к
У
UЗС
к
П
к
У
γω
I
R
Я


I R П
кФП
кФП
кФП
кФП
кФП
С = кФП, Кс = α Кy КП U= кФПω + IRЯ=Сω + IRЯ
ω
к
П
к
У
UЗС
K
C
K IR
ω
- C Я
C C
- IR Я IRП
C
к к U
K IR IR IR
;
к к U I(K R R R )
ω -
ω K ω
П У ЗС - C Я Я П
П У ЗС
C Я Я П
C C C
C1 K C
C1 K C
к П к У UЗС
R Я 1 K C R П
ω
-

C1 K C
C1 K C
I ЭМХ система
к П к У UЗС
R Я 1 K C R П
ω
-

C1 K C
M
C2 1 K
C
МХ система
Перепады скоростей для замкнутой и разомкнутой системы
Δωз
I( Rя(1 кС )
1
кС

с
R П )
1
кС
Δωз
IRя Rп /(1 с)/ с; Δωр
IRя Rп/ с
Δωз
Δωр
Физическая сторона процесса. При изменении нагрузки на валу двигателя увеличива- ется ток якоря и увеличивается внутреннее падение напряжения. Это вызовет увеличение сигнала рассогласования и увеличение сигнала управления. Увеличится ЭДС преобразова- теля и компенсация падения напряжения на выходе ДПТ.
17
Система управляемый преобразователь-двигатель с положительной обратной