

I, ib – токи якоря и ов, е – эдс якоря,
RB, RД – добав. резисторы в цепях возбуждения и якоря.
Условия равновесия напряжения приложенного к Дв выражается
ур-ем:
U EД I Я R Я R Д
ЕД = кФω , где RЯ, RД – собствен и доба-
вочн сопротив в цепи якоря.
ω f (Iя)
U (R Я
R Д )
Я
I
ЭМХДПТ
kФ kФ

Зависимость скорости от тока якоря называется электромеханичхар-койДПТ.
Для получения ур-ия мех хар-ки надо найти зависимость скорости от момента ДВ.
U R Я
М= кФIЯ ,
ω
M
МХДПТ
kФ kФ2

Мех
хар-ка
при
неизмен параметрах
(U,
R,
Ф)
представл
прямую
линию,
при
изменении
одного
парам,
вид
меняется.

ест. Rяд1
Rяд2 Rяд1<Rяд2


Все хар-ки при моменте =0 проходят ч/з точку, лежащ на оси ординат, угловая скорость в этой точке имеет оп- ределен знач и не зависит от сопрот якорной цепи. Эта точка носит название скорость идеального хх
Mн M
U
ω0
kФ
Разность установившихся значений ЭП, до и после приложения заданной статич нагрузки
Δω
R Я
назыв
статическое
падение
скорости
ЭП. kФ2
Естественной хар-ой называется такая, к.т. получается при отсутствии внеш резисторов в якорной цепи и номин знач напряж и макс потока Дв.
ω
Uн
kФ
R Я M
kФ2





Ур-ие естеств хар-ки
естеств.
M
5
Искусственные хар-ки ДПТ НВ получаются при изменении какого-либо параметра.
ИзменениеU ω = f (I), ω = f (M),UC >U1> U2


Uc=Uном
Uc=Uном
U1 U1
Uc=Uном > U1 >
U2 U2
M I
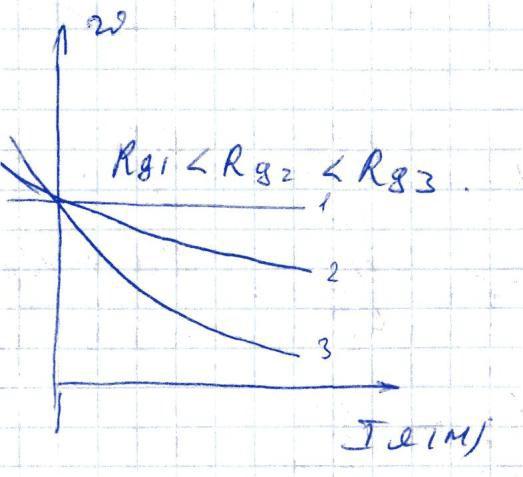
ИзменениеR. R2>R1>Rр


Rp=0 R1 R2
M
ИзменениеФ. Ф2<Ф1<Фн




Ф2
Rp=0
R1
R2
I
Ф1
Ф2

R2 > R1 > Rр
иск
Ф1
ест Фн
Iкз M
Ф2 < Ф1 < Фн
Iкз = const Фн
I
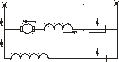
Механическая характеристика ДПТ с последовательным возбуждением.
+
Iв=Iя
U -
ОВ Rдоб
ω U I Я R Я
kΦ
ЭМХ
Eдв
ω U R kα M kα
kα

МХ
Особенность
-
большая
крутизна
в
области
малых
моментов.
Значительное
увеличение
скорости
и
при
малых
М
обуславливается
уменьшением
Ф.
Построение
реальной
MX
ведется
на
основании
ка-
таложных
данных,
где
приводятся
естественные
характеристики
u=f(Iя),
M=ψ(Iя).


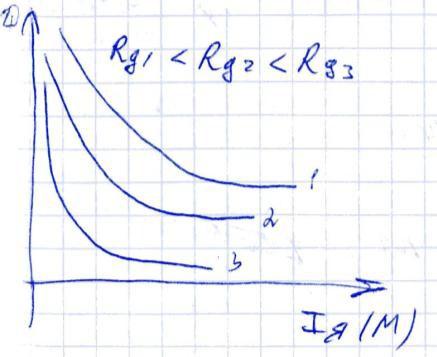
Если ω и М приводятся в относительных единицах, то такие ха- рактеристики называются универсальными, ω•=f(I•), М•=f(I•).
M
Искусственные хар-ки ДПТ с послед возбуждением
6
Механическая характеристика ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением имеет 2 обмотки возб, п.э мех хар-ка занимает промежу- точ положение между ДПТ с НВ и после возб. При расчетах мех-ой хар-ки используют ес- теств универсал из каталогов. В отличии от ДПТ с посл возб, данный Дв имеет конечное знач скорости идеальн хх. Это знач опредил-ся только потоком создающим ЭДС обмотки
U
возб 2 (ОВ2).
+

ω0
kФ2
U -




Iв Eдв
ОВ1
Rдоб
L1
Iв2
OВ2
L2
Iв1
Rв озб
I=Iв1+Iв2
естеств.
M
Искусственные хар-ки ДПТ со смешанным возбуждением
7