

Шпоры по ТЭП
.pdf1.1 Уравнение движения электропривода. Режимы работы в зависимости от знака
Мдин
При изучении движения ЭП возникает необходимость в определениях различных механических величин: - пути и угла поворота; - скорости и ускорения; - моментов и сил, вызывающих движение и определяющих его характер.
Движение ЭП определяется действием двух моментов: - момента, развиваемого двигателем М; -момента сопротивления Мс (статического момента).
В зависимости от причин, обуславливающих возникновение момента сопротивления, различают реактивный и активный моменты сопротивления.
Реактивный момент сопротивления появляется только вследствие движения - это противодействующая реакция механического звена на движение. Реактивный момент создается силами реакции среды на движущееся тело. К ним относятся, например, моменты трения, возникающие во вращающихся элементах, моменты, действующие на рабочие органы металлорежущих станков, моменты на крыльчатке центробежных насосов, вентиляторов и т.п. Реактивный момент направлен всегда против движения, т. е. имеет знак, противоположный знаку скорости. При изменении направления вращения знак момента также изменяется на обратный. Элемент, создающий реактивный момент, может быть только потребителем энергии.
Активный момент сопротивления появляется независимо от движения ЭП и создается посторонним источником механической энергии. Это, например, момент, обусловленный весом перемещаемого по вертикали груза, момент, создаваемый силой ветра. Направление активного момента не зависит от направления вращения, т. е. знак активного момента не связан со знаком угловой скорости. При изменении направления вращения знак активного момента сохраняется. Элемент, создающий активный момент, может являться и потребителем, и источником энергии.
M MC J ddtω ; где М – момент двигателя, Мс – момент сопротивления.
Знак "-" связан с тем, что за положительное направление момента сопротивления принимают направление, противоположное моменту двигателя.
Правая часть уравнения представляет собой динамический момент:
MДИН |
J |
dω |
JE где JE – динамический момент, |
||
dt |
|||||
|
|
|
|
||
M MC JE , |
M MC Mдин |
||||
Из ур-ия следует, что направление динамического момента совпадает с ускорением ЭП. В зависимости от знака динамического момента различ следующие режимы работы ЭП:
1) |
Мдин> 0 , т.е. |
|
t |
>0 - разгон ЭП при скорости ω >0, торможение при ω <0. |
|
|
|
|
|
||
2) |
Мдин= 0, т.е. |
|
|
|
=0 – ω=const - установившийся режим работы ЭП (Мдв=Мс) |
|
t |
||||
|
|
|
|
||
3) |
Мдин <0, т.е. |
|
|
|
<0 - торможение при ω >0, разгон при ω <0. |
|
t |
||||
Момент, развиваемый дв-ем не является пост-й величиной, а представляет собой ф-ю ка- кой-либо переменной, а в некоторых случаях и нескольких переменных. Эта ф-я задается аналитически или графически. Момент сопрот-ия также является ф-ей нескольких переменных (скорости, пути, времени).
1
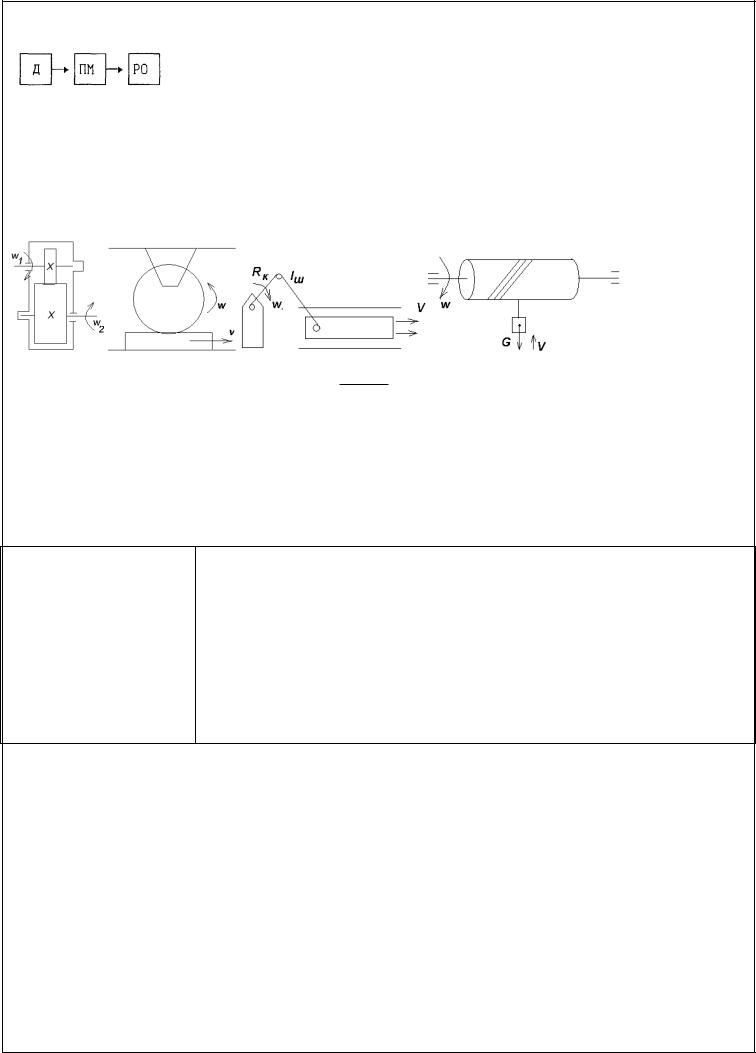
1.2 Механика электропривода. Моменты, действующие в электроприводе.
Любая мех-ая часть ЭП состоит из 3 основных звеньев с общими для разных приводов функциями.
Двигатель (Д) как звено мех-кой части ЭП представляет собой источник или потребитель мех-ой эн-ии. В мех-кую часть ЭП от Д входит только ротор С (или якорь в ДПТ), кт. обладает моментом инерции Jpд, вращается с частотой ω, может развивать ДВ-ый или тормозной момент М. Передаточный преобразовательный мех-м (ПМ) осущ-ет преобраз-ие движения в мех-ой части ЭП (Н, вращательное движение преобразуется в возвратно-поступательное и наоборот). К передаточным мех-мам относятся: редукторы, зубчато-реечные передачи, кривошипно-шатунные мех-мы, барабанные мех-мы.
ПМ характ-ся коэф-ом передачи КПМ WВЫХ , мех-ой инерционностью и упругостью его
WВХ
элементов, зазорами в зацеплениях и сочленениях. Рабочий орган (РО) реализует подведенную к нему мех-ю энергию в полезную работу. Чаще всего он явл-ся потребителем энергии. При этом поток мех-ой мощ-ти направлен от ДВ к РО-ну. РО характ-ся инерционностью, рабочим моментом при его вращательном движении или рабочим усилием при поступательном движении.
Примеры:
|
Производственная |
Рабочий орган |
|
машина |
|
1 |
Металлорежущий |
Шпиндель токарного станка, патрон со сверлом сверлильного стан- |
станок |
ка, фреза фрезерного станка, ходовой винт механизма подачи |
|
2 |
Прокатный стан |
Рабочие валки, винт нажимного устройства |
3 |
Подъемный кран |
Грейфер механизма подъема, тележка мостового крана, поворотная |
|
|
платформа |
4 |
Конвейер |
Лента-цепь |
5 |
Стиральная машина |
Центрифуга, крыльчатка |
Передача мех-ой энергии от вала Дв к РО и обратно связана с потерями в мех-их звеньях. Причина потерь – трение в подшипниках, зацеплениях и т.д.
В мех-их звеньях, обладающих упругостью возникают динам-ие потери, обусловленные вязким трением в деформируемых элементах. В результате поток мощ-ти, проходя от источников к потребителю, постепенно уменьшается. Потери в данном случае покрываются ДВ-ем – источником энергии.Работа, совершаемая дв-лем, (или РО, если энергия передается
от РО к ДВ) |
определяется следующим образом: Вращательное |
движение Работа |
||
|
|
|
|
|
t |
|
|
t |
|
W M ω dt |
Мех-ая мощ-ть P M ω Поступательное движение |
Работа W F V dt |
||
0 |
P F V |
0 |
||
Мех-ая мощ-ть |
|
|
||
М – вращ. момент, Нм, F – усилие (сила), Н, V – линейная скорость, м/с, ω – угл скорость, рад/с. Задача ЭП в конечном счете состоит в выполнении заданных по технол-им требов. законов Дв РО с макс-м приближением.
2
1.3 Жесткость механических характеристик. Устойчивость и установившейся режим работы электропривода.
При рассмотрении работы Дв, приводящего в движение производственный механизм, необходимо выявить соответствие мех.хар-ки Дв, мех. хар-ке производственного механизма. Зависимость между приведенными к валу двигателя скоростью и момента сопрот-я мех-ма
ω=f (Мс) называется механической характеристикой производств. мех-ма.
Механической хар-кой элДв называется зависимость его угловой скорости от вращающего момента ω=f (М).
Почти все элДВ обладают номинал свойством, что частота вращения яв-ся убывающей функц-ей момента элДВ. Это относится к ДПТ с независ, последов и смешан возбуждения и к АД-м.
Однако степень изменения скорости с измен-ем момента у разных Дв-ей различна и характеризуется жесткостью их мех. хар-к.
Жесткость механических характеристик – это отношение приращения момента к приращению угловой скорости w.
β= М / Δω=(М2-М1) / (ω2-ω1) - жесткость прямолинейной хар-ки (жест-ть пост-на).
β М - жесткость криволинейной характеристики.
w
Линии мех.хар-ки обладают постоянной жесткостью, в случае нелинейных мех.хар-ик жесткость переменна и опредил-ся в каждой точке.
Обычно на рабочих участках мех.хар-ик Дв-й жесткость отрицатетельна.
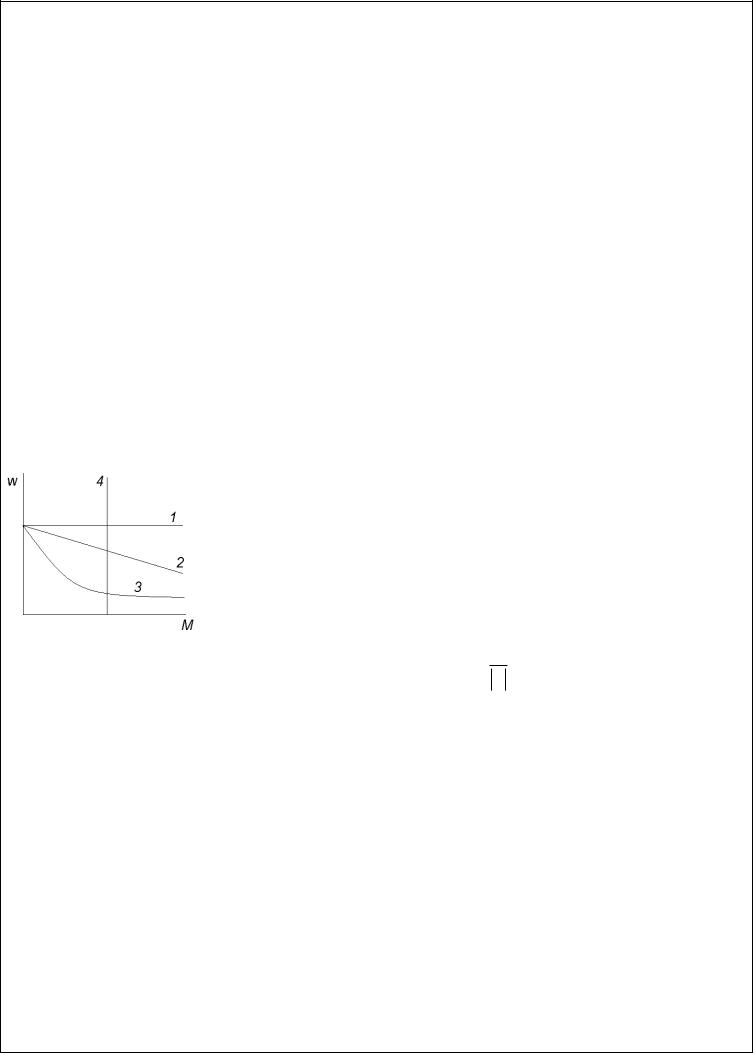
Мех-ие хар-ки делятся на 4 основ категории:
1– Абсолютно жесткая характеристика (такой мех.хар-й обладает СинхронДв),
2- Жесткая характеристика – (АД на рабочем участке, ДвПостТНезавВозбужд),
3- Мягкая характеристика (ДПТ ПоследоВозбужд),
4- Абсолютномягкая характеристика – система источник тока –
Дв; Д, работающий в режиме стабилизации тока якоря. t 1 -время разгона
р |
Р |
|
Работе ЭП и произв.мех-ма в установившемся режиме соответствует равновесие момента сопрот-я мех-ма и вращающего момента Дв-ля при опред. скорости, т.е М=Мс.
Изменение Мс на валу Дв-ля приводит к тому, что скорость Дв-ля и момент к.т. он развивает могут автоматически изменяться и привод будет продолжать устойчиво работать при др.скорости с новым значением момента, или не происх. дальнейших изменения условия работы.
Для восстановления равновесия между измен. Значения момента сопр-я и момент Дв-ля во всех неэл приводах требуется участие спец. регуляторов, к.т. воздействуют на источник энергии.
В элДв-ях роль регулятора играет ЭДС
3

ω
2 3
ω1
ω2
1
М1 |
М2 М |
1-мех-я хар-ка Дв Пост Тока с незав возбужд, 2,3 – мех хар-ки конвейера. Характеристики 2 соотвеств момент статический, при хх конвейера. Хаар-ка 3 получается при большом моменте сопротив Мс когда на конвейере находятся транспортируемые им детали.
В начале при хх конвейера Дв работает со скоростью, с увеличением нагрузки Дв тормозится, скорость его снижается, благодаря чему уменьшается ЭДС.
E=kФω , при уменьшении Е возраст ток в якорной цепи дв-ля и момент момент, развиваемый Дв-ем.
U=E+RяIя , М= кФIя
Рост момента Дв продолжается до тех пор, пока не наступит равновесие моментов М1=М2 при новом значении скорости, т.е. точка ω2 Рассмотрим условия работы ЭП в установившемся режиме характеризуют статич устой-
тьЭП когда изменение во времени скорости и момента происходит медленно в отличие от динамич устойчивости, к.т. хар-ся переход. процессом.
Под статич устойчивостью понимается такое состояние установившегося режима работы ЭП, когда при случайно возникшем отклонении скорости от установившегося значения привод возвращается в состояние устойчивого режима.
При не неустойчивом дв-ии любое даже малое отклонение от скорости от установившегося значения приводит к изменению состояния привода – он не возвращается в состояние установившегося режима.
Привод статически устойчив, если в точке установившегося режима выполняется условие
M |
|
Mc 0 |
, |
β βc 0 |
ω |
|
ω |
|
|
Привод устойчив, если при положительном приращении угловой скорости момент Дв-ля окажется меньше статич момента и привод вследствие этого затормозится до прежнего значения скорости.
При отриц. приращении угловой скорости момент Дв-ля окажется больше ст момента и ЭП вследствие этого разгонится до прежнего значения скорости.
4
1.4 Двигатель постоянного тока (типы). Двигатель постоянного тока с независимым возбуждением. Уравнения электромеханической и механической характеристик. Искусственные характеристики.
По способу включения ОВ по отношению к обмотке якоря ДПТ делятся на дв-и параллельного возбуж-я, дв-и последов-го возбуж-я и дв-и смешанного возбуждения.
Машина постоянного тока является обратимой машиной, т. е. она может работать как генератор электрической энергии, если к ее валу подводится механический вращающий момент, и как Д, если к ее обмоткам подводится эл. энергия.
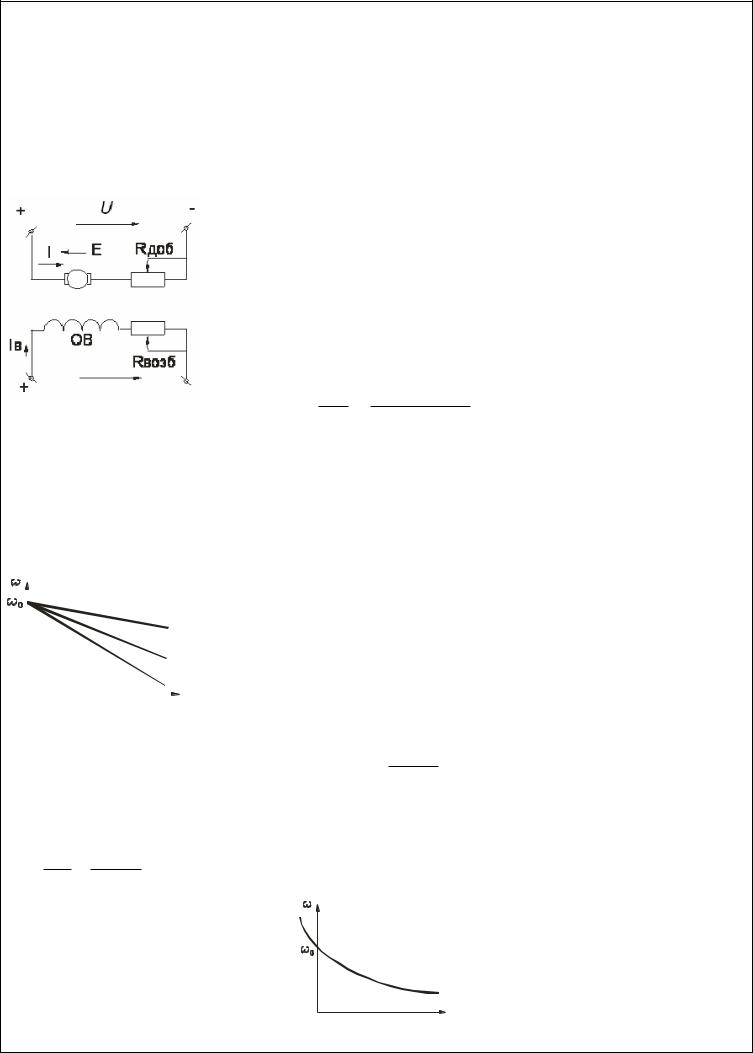
Характеристики ДПТ с независимым возбуждением
Схема включ-я ДПТ НВ.
I, IB – токи якоря и ОВ, Е – ЭДС якоря,
RB, RД – добав. резисторы в цепях возбуждения и якоря.
Условия равновесия напряжения приложенного к Дв выражается ур-ем:
U EД IЯ R Я R Д ЕД = кФω , где RЯ, RД – собствен и добавочн сопротив в цепи якоря.
ω f (Iя) U (R Я R Д ) I Я ЭМХДПТ kФ kФ
Зависимость скорости от тока якоря называется электро механич хар-кой ДПТ. Для получения ур-ия мех хар-ки надо найти зависимость скорости от момента ДВ.
М= кФIЯ , |
ω |
U |
|
R Я |
M МХДПТ |
|
kФ |
kФ 2 |
|||||
|
|
|
|
Мех хар-ка при неизмен параметрах (U, R, Ф) представл прямую линию, при изменении одного парам, вид меняется.
|
|
|
|
|
|
|
Все хар-ки при моменте =0 проходят ч/з точку, лежащ |
||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
на оси ординат, угловая скорость в этой точке имеет оп- |
|||||
|
|
|
ест. |
|
|||||||
|
|
|
Rяд1 |
|
ределен знач и не зависит от сопрот якорной цепи. Эта |
||||||
|
|
|
|
точка |
носит название скорость идеального хх |
||||||
|
|
|
Rяд2 |
Rяд1<Rяд2 |
|||||||
|
|
|
|
|
|
U |
|
||||
|
|
|
|
|
|
|
ω |
|
|
||
|
|
|
|
|
M |
|
0 |
kФ |
|||
|
Mн |
|
|
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
Разность установившихся значений ЭП, до и после приложения заданной статич нагрузки
назыв статическое падение скорости ЭП. ω R Я
kФ 2
Естественной хар-ой называется такая, к.т. получается при отсутствии внеш резисторов в якорной цепи и номин знач напряж и макс потока Дв.
ωUн R Я M Ур-ие естеств хар-ки kФ kФ 2
естеств. |
M
5
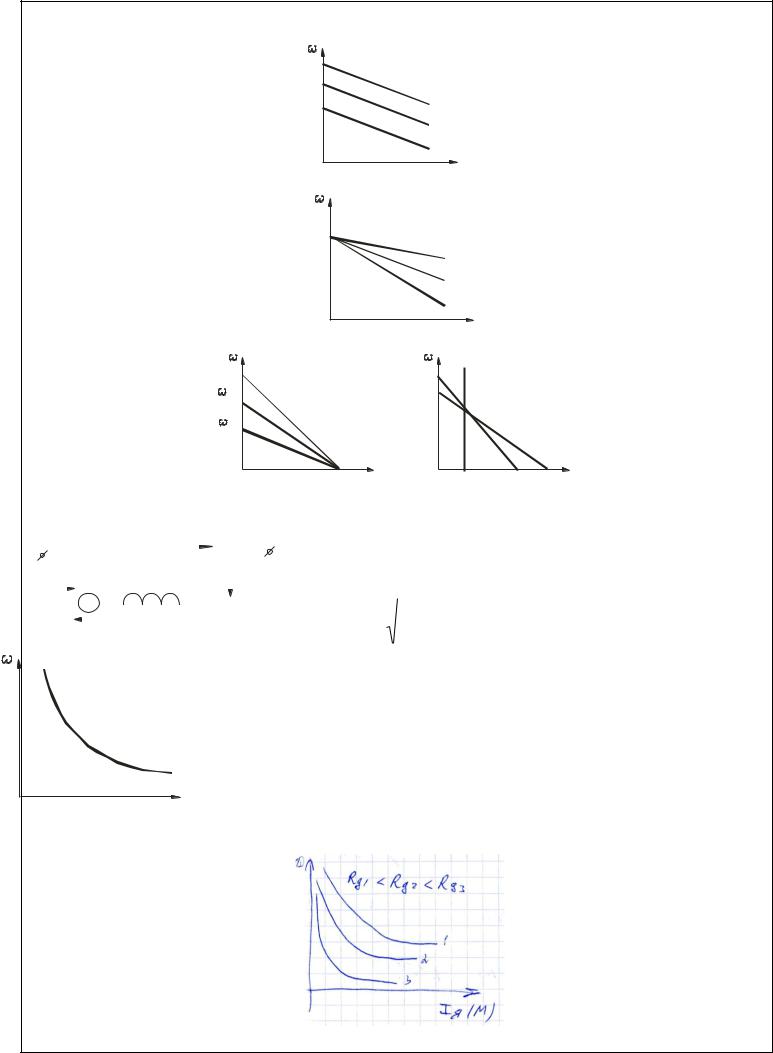
Искусственные хар-ки ДПТ НВ получаются при изменении какого-либо параметра.
1) Изменение U ω = f (I), ω = f (M),UC >U1> U2
|
|
|
Uc=Uном |
Uc=Uном |
|
|
|
|
|
U1 |
|
U1 |
Uc=Uном > U1 > |
|
|
|
|
|
||
|
|
|
U2 |
|
U2 |
|
|
|
|
M |
|
I |
|
2) Изменение R. |
R2>R1>Rр |
|
|
|
|
|
|
Rp=0 |
Rp=0 |
|
|
||
|
|
|
R2 > R1 > Rр |
|
||
|
R1 |
|
R1 |
|
||
|
|
|
|
|||
|
|
|
|
|
||
|
R2 |
|
R2 |
|
|
|
|
|
|
|
|
||
|
|
M |
|
I |
|
|
3) Изменение Ф. |
Ф2<Ф1<Фн |
|
|
|
|
|
|
|
Ф2 |
Ф1 |
Ф2 |
|
|
|
иск |
Ф1 |
|
|
|
|
|
ест |
Фн |
|
|
Ф2 < Ф1 < Фн |
|
|
|
|
Iкз = const |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Фн |
|
|
|
Iкз |
M |
|
I |
|
Механическая характеристика ДПТ с последовательным возбуждением.
+ |
|
|
|
|
|
|
|
|
|
U |
- |
|
U I Я R Я |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
|
- ЭМХ |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Iв=Iя |
ОВ |
Rдоб |
|
kΦ |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
U |
|
|
|
|
R |
|
|||||||||||||||||
|
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
- МХ |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kα |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kα |
|
|
M |
|
|
|
|
||
|
|
|
Eдв |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kα |
|
|
|
|
|
|
||||||||
Особенность - большая крутизна в области малых моментов. Значительное увеличение скорости и при малых М обуславливается уменьшением Ф. Построение реальной MX ведется на основании каталожных данных, где приводятся естественные характеристики u=f(Iя), M=ψ(Iя).
Если ω и М приводятся в относительных единицах, то такие характеристики называются универсальными, ω•=f(I•), М•=f(I•).
M
Искусственные хар-ки ДПТ с послед возбуждением
6

Механическая характеристика ДПТ со смешанным возбуждением
ДПТ со смешанным возбуждением имеет 2 обмотки возб, п.э мех хар-ка занимает промежуточ положение между ДПТ с НВ и после возб. При расчетах мех-ой хар-ки используют естеств универсал из каталогов. В отличии от ДПТ с посл возб, данный Дв имеет конечное знач скорости идеальн хх. Это знач опредил-ся только потоком создающим ЭДС обмотки
возб 2 (ОВ2). ω0 kФU 2
+ |
|
U |
|
|
- |
Iв |
Eдв |
ОВ1 |
Rдоб |
|
|
|
|
||||
|
|
|
|
|
|
Iв2 |
|
L1 |
Iв1 |
|
I=Iв1+Iв2 |
|
|
|
Rвозб |
естеств. |
|
|
OВ2 |
|
|
||
|
|
|
|
|
|
|
L2 |
|
|
|
|
M
Искусственные хар-ки ДПТ со смешанным возбуждением
7
1.5 Виды тормозных режимов двигателя постоянного тока (на осях, достоинства, недостатки, применение).
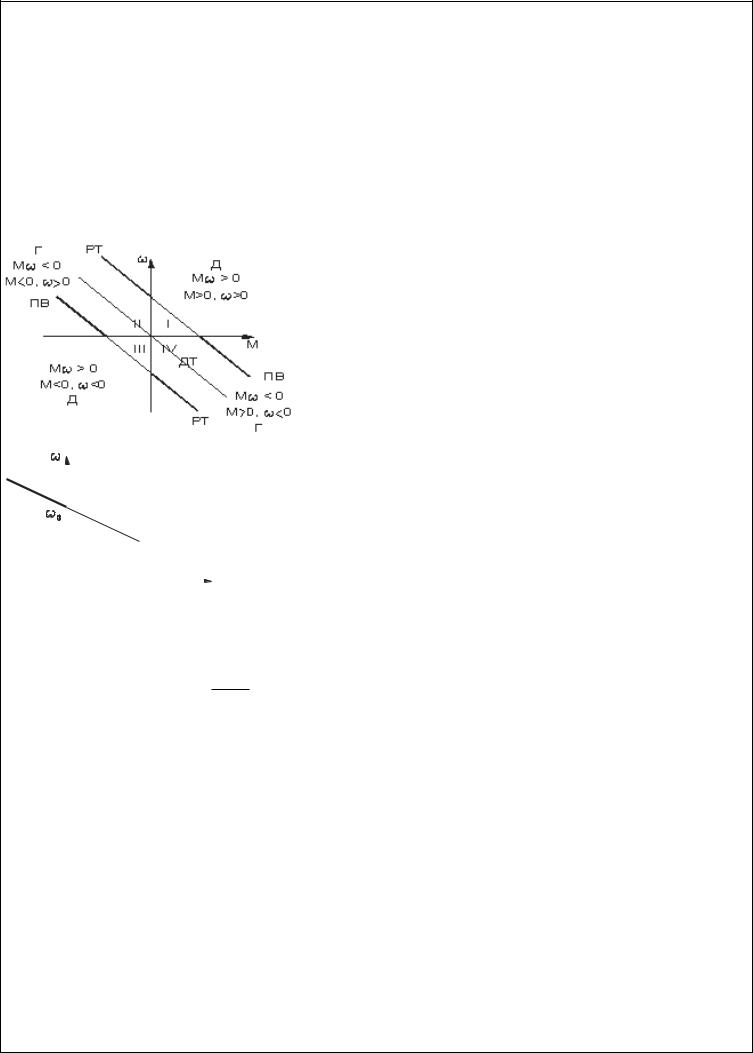
Характ-ки изоб-ся на плоск-и в прямоуг-ой системе координат с осями М и w. Полож-ие точки на плос-ти, характеризуемое двумя корд-ми, определяет режим работы двиг-я. Условием того или иного режима работы двиг-я является знак мощности P=Mω.
Из принятого полож-го направ-ия движ-ия следует, что, за исключением осей координат, любая точка квадрантов I и III, где знаки скор-и и мом-та одинаковы, соответ-ет работе, совершаемой двиг-ем (Мω)>0. Двль при этом преобразует электр-ую энергию в мех-ую.
Точки квадрантов II и IV, где знаки скор-ти и мом-та различны, относятся к потреблению двиг-м мех-ой энергии (Мω)<0. В этом случае дв-ь преобразует мех-ую энергию в электрическую.
Электр-ая машина как электромех-ий преобраз-ль может работать только в одном из двух режимов; либо в двиг-ом, либо в генер-ном. В двиг-ом режиме ЭД развивает двиг-ый момент, а в генер-ом - тормозной.
Рекуперативное торм-е: примен-е – тормозной спуск в подьемно-транспортных механизмах.
РТ |
|
|
Дост-ва: 1) надежность торм.; |
|
|||
|
|
2) автомат-й переход из двигат-го реж. в тормозной без измен-я |
|
|
|
|
|
|
|
|
в схеме; |
|
|
|
3) экономичность, возврат энергии в сеть. |
|
|
|
Недост-ки: 1) для АД данное торм-е возможно только при сов- |
|
|
|
падении частоты отдаваемого U с частотой сети; 2) не обесп-ет |
|
|
|
M полной остановки;3) невозможность торм-ия при ω<ωо |
Переход в тормозной режим с отдачей энергии в сеть будет иметь место, когда со стороны |
|||
исполнительного мех-ма на вал дв-ля действует в дв-ом режиме момент, совпадающий по |
|||
направлению с моментом, развиваемым двигателем.Ток потребляемый дв-ем из сети опре- |
|||
деляется по формуле I U E . Под действием активного момента, развиваемого исполнит-
R Я
ым элементом и момента дв-ля увелич скорость мех-ма. При этом будет увел-ся ЭДС. В некий момент времени произойдет выравнивание ЭДС и напряжения, что будет соответствовать режиму идеалнХХ. Дальнейшее увелич скорости приведет к превышению Е над U и, как следствие, к изменению направления тока, протекающего по цепи якоря. Под действием преобладающей ЭДС ток течет в сеть.
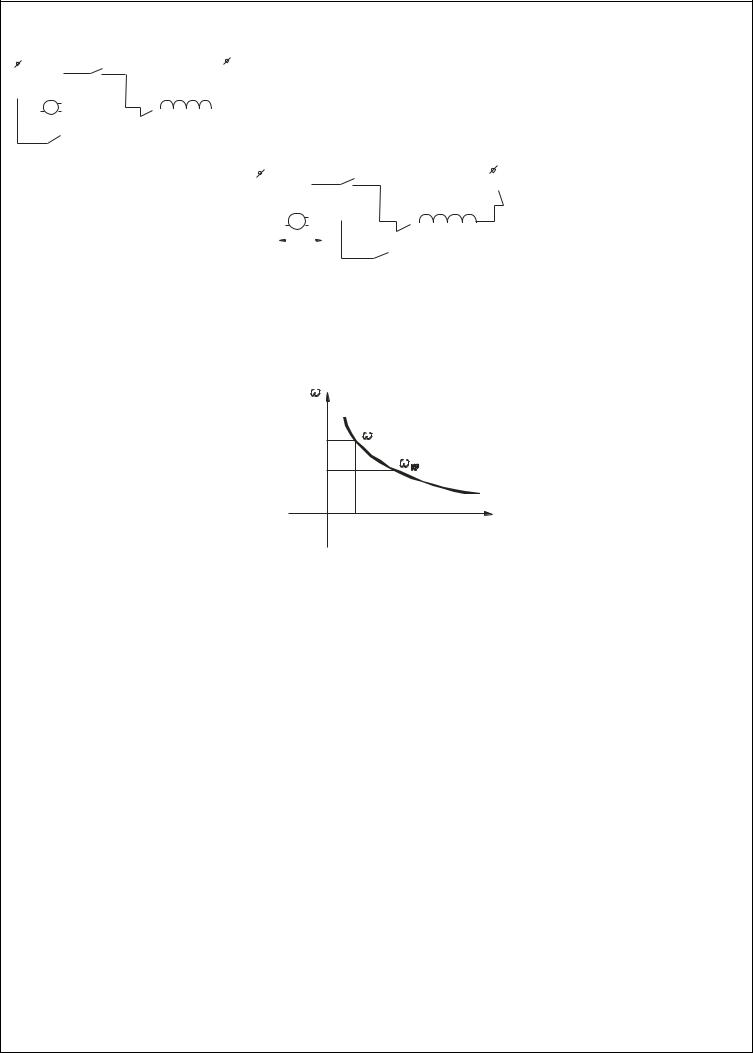
Для ДПТ с послед возбужд-ем рекуператив торможение не возможно. Рекуператив торм-е для ДПТ со смеш воз-м возможно при макс тормоз моментах. Рекуператив торм-е не обеспеч полной остановки, а примен для ограничения разгона.
Баланс мощности Рмех=Рэл+∆Р, где ∆Р-результатив мощ-ть потерь в силовых цепях Дв. Режим противовкл-я: примен в реверсивных приводах, приводах требующих полной остановки.
Достоин-ва: 1) надеж-ть торм-ия при любой скорости. 2) возм-ть полной остановки; 3) высокая интенсивность торм-ия; 4) возм-ть получения обратного вращения; 5) сравнительное постоянство тормозного эффекта.
8

Недост-ки: 1) большое потребление энергии. 2)необход-ть прим-ия гасящих резисторов; 3) большая крутизна мех. характеристик. 4) возможность самопроизвольного реверса. Противовкл-ем наз-ся режим, при к.т.-ом дв-ль вращается за счет запаса кинетической энергии или потенциальных сил исполнит-го мех-ма в сторону, обратную действию момента, развиваемого дв-ем. При этом момент двиг-ля, стремящегося вращаться в противоположную сторону, противодейст-ет движ-ю исполнительного механизма.
В этом случае ЭД потребляет как мех-ую энергию с вала, так и электрическую энергию из сети. Суммарная энергия расходуется в силовых цепях двигателя, т. е. Р=Рм+Рэ. – баланс мощностей. Торможение противовкл-ем является неэкономичным и исп-ся достаточно редко.Торможение противовкл-ем может осуществляться 2 способами:
- со стороны Дв,
+ |
|
- |
|
|
K1.2 |
|
|
|
|
K2.1 |
K1.3 |
|
|
|
OВ Iв |
Iд |
Mт |
Mн |
M |
|
|
Rтпв |
|
|
К1.1 |
K2.2 |
|
|
|
Условием реализации 1 вида т-ия явл-ся изменение полярности подключения обмотки якоря или обмот возбужд, а также введение дополнит гасящего сопрот-ия. Для осуществ тор- мож-я необход произвести коммутацию аппаратов управ-я, теперь он работает на участке с
координатами (Мторм, ωном). Гасящее сопр-е Rтпв ввод-ся для огранич велич тормоз тока и мом-та. и для уменьш жесткости тормоз хар-к. При этом обеспеч постоянство тормозн мом-
та.
- со стороны рабочей машины.
Применяется при тормоз спуске грузов. Пусть Дв работает на рабоч уч-ке с теми же координатами, развивая двиг момент и преодолевая момент сопротивл-я. Если увелич момент сопр-я до знач КЗ Дв остановится. При дальней увелич Мс Дв начнет вращаться в сторону противополож Мдв. Чем больше увелич Мс, тем больше скорость Дв.
Необходимом помнить, что увелич Мс выше Мном-го ведет к сниж ресурса работы Дв. Что бы этого не происходило в цепь вводят R,
огранич-го торм момент.
Динамическое (основной вид торможения в ЭП)
Примен-е: Для реверсивных приводов; приводов, требующих полной остановки Д.
Mт2 Мт1 |
Mн |
M |
|
Rдт1 |
|
|
Rдт2 |
|
+ |
- |
|
Д режим |
|
|
Дост-ва: 1)Надежность, 2)Простота включения. 3) Плавность торможения, 4)Экономичность. 5).Возмож-ть получ-ия характ-ик с малой крутизной.
Недост-ки:1) Невозм-ть тормож-я при отсутствии питания на ОВ
вслучае динам-го торм-ия с НВ; 2) Возможность размагнич-я дв-я
вслучае динам-го торм-ия с самовозбуждением.
Режим ДТ в ДПТ осуществляется двумя способами:
+ |
1. Торможение с независимым возбуж- |
|||
|
|
|
|
дением. 2. Торможение с самовозбужде- |
|
|
|
|
торм. режим нием. |
|
|
|
|
|
|
|
|
|
Реализация ДТ в ДПТ с ПВ. |
|
|
|
|
|
- |
9 |
Торм-ие с незав-ым возбуж-ем заключ-ся в том, что ОВ подключается к источнику посто- |
|||||||||||||||||||||||||||||||||
янного напряжения, а обмотка якоря замыкается на сопротивление Rдт. (Uс=0) |
|||||||||||||||||||||||||||||||||
+ |
|
|
|
Rдт K2.1 |
- |
В момент, когда К1 замкнут, а К2 разомкнут, схема соответ- |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
К1 |
OВ |
|
ствует двиг-му режиму работы. При изменении коммутации |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(размыкается К1 и замыкается К2) якорь ДВ-я замыкается на |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rдт, а в цепь ОВ-ия включ сопротивление Rдв, Rдв - сопро- |
||||||||||||||||
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
тивление, к.т. компенсирует влияние сопротивления якоря. |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
K2.2 |
|
|
|
+ |
|
|
Rдт |
K2.1 |
|
- |
|
При динам-ом торм-ии с |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
самовозбуж-ем якорь замы- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К1.2 |
кается на сопротивление |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
динам-го торм-ия, последо- |
|
|
|
|
|
|
|
|
|
|
К1 |
OВ |
|
вательно включенное с |
|||||||||||||||||||
ОВ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В режиме ДТ с самовозбуж- |
|
|
|
|
|
|
|
|
|
|
|
ем нельзя допустить из- |
|||||||||||||||||||||
|
Iдт Iд |
|
|
K2.2 |
|
|
|
||||||||||||||||||||||||||
мен-я направления тока в ОВ, т. к. машина в этом случае "размагничивается" Поэтому схему строят таким образом, чтобы при переключении К1 и К2 сохранилось направление тока в ОВ.
В процессе динам-го торм-ия двигатель тормозится до скорости ωкр, после которой он теряет способность работать с самовозбуж-ем и дальнейшее торм-ие происходит при остаточном потоке намагничивания и является неэффективным.
M |
10