

Глава 9 Уравновешивание роторов
.pdf9. УРАВНОВЕШИВАНИЕ РОТОРОВ
9.1. Основные понятия
Ротором в теории уравновешивания (балансировки) называется любое вращающееся тело. Ротором является коленчатый вал двигателя, якорь электродвигателя, шкивы, маховики и т.п. /13/.
Как известно из курса теоретической механики, давление вращающегося тела на его опоры в общем случае складывается из двух составляющих: статической и динамической. Возникновение статической составляющей обуславливается действием сил тяжести, возникновение динамической составляющей – ускоренным движением материальных частиц, из которых состоит ротор. Если динамическая составляющая не равна нулю, то ротор называется неуравновешенным /13/.
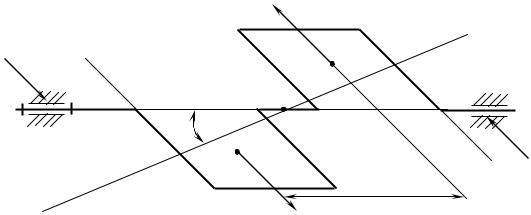
Рассмотри ротор, установленный на двух опорах А и В (рис.9.1). Плоскость ОХУ проходит через центр масс S ротора, а вся система координат ОХУZ вращается вместе с ротором.
a |
Х |
b |
ХА |
S |
|
хS |
|
ХВ |
|
|
rS |
|
|
B |
|
|
A |
|
O |
|
Z |
||
|
|
|
||||
|
|
|
|
|||
УА |
|
уS |
|
УВ |
ω=const |
|
|
|
|
||||
|
|
|
|
|||
У
Рис. 9.1
При равномерном вращении ротора вокруг оси Z (см. рис. 2.1), проекции динамической составляющей определяются следующим образом:
ХА + ХВ = ФХ; |
|
УА + УВ = ФУ; |
|
- ХА а + ХВ b = МФх; |
(9.1) |
УА а - УВ b = МФу . |
|
Как видно из представленных формул, неуравновешенность можно численно rоценить посредством проекций главного вектора Ф и главного момента МФ центробежных сил инерции ротора.
13 Разработал Корчагин П.А.

Проекции определяются по следующим формулам /13/: |
|
|
ФХ= m ω2 |
хS; |
|
ФУ= m ω2 |
уS; |
|
МФх= – JУZ ω2 ; |
(9.2) |
|
МФу= – JХZ ω2 , |
|
|
где m – масса ротора; хS, уS – координаты центра масс S |
ротора; |
|
JУZ , JХZ – центробежные моменты инерции ротора относительно координат
ОХУZ (см. рис. 9.1)
Следуетr отметить, что в рассматриваемой задаче момент сил инерции ротора МФ есть величина векторная /13/.
Как видно из уравнений (9.1) неуравновешенность ротора возрастает пропорционально квадрату его угловой скорости. Поэтому, если быстроходные роторы (рабочие колеса турбин, коленчатые валы двигателей внутреннего сгорания и т.п.) неуравновешены, то они оказывают на свои опоры динамическое давление, вызывающее вибрацию стойки (станины) и ее основания /13/.
Это можно пояснить следующим числовым примером. Пусть масса ротора m=10 кг, постоянная угловая скорость ω =1000 рад/с, смещение центра масс от оси вращения хS =0,0001 м. Модуль силы инерции Ф определим по формуле (9.2).
ФХ = m ω2 хS =10 10002 0,0001 = 1000 Н.
Как видно из полученных значений, даже при небольшом смещении центра масс от оси вращения ротора сила инерции превышает силу тяжести в 10 раз, а следовательно, возрастают и реакции в опорах /11/.
Устранение этого вредного воздействия называют уравновешиванием (балансировкой) ротора. Решение данной задачи относится к динамическому проектированию машин /13/.
Согласно уравнений (9.2) модуль главного вектора центробежных сил инерции ротора будет равен /13/
Ф = ω2m xs2 + уs2 . |
(9.3) |
В векторном виде формула (9.3) примет вид: |
|
r |
(9.4) |
Ф = ω2m r . |
|
S |
|
Вектор |
|
D = m rrS |
(9.5) |
называют главным вектором дисбалансов ротора /13/.
Согласно уравнениям (9.2), модуль главного момента центробежных сил инерции ротора будет равен /13/:
MФ = ω2 J2хz +J2уz = ω2MD , |
(9.6) |
14 |
Разработал Корчагин П.А. |

где |
MD = |
J2хz +J2уz |
(9.7) |
r |
|
|
|
Величина MD |
называется главным моментом дисбалансов ротора. В |
||
векторном виде имеем: |
r |
|
|
|
r |
|
|
|
MФ = ω2MD . |
(9.8) |
|
Для количественной оценки неуравновешенности ротора используют главный вектор D и главный момент MD дисбалансов ротора.
9.2. Виды неуравновешенности роторов
Различают следующие виды неуравновешенности роторов: статическую, моментальную и динамическую /13/.
Статически неуравновешенным называется ротор (рис. 9.2) центр масс S которого не находится на оси вращения, но главная центральная ось инерции (I-I) параллельна оси вращения. При этом rS ≠ 0, JXZ=JУZ=0. Таким образом, статическая неуравновешенность, согласно уравненияr (9.5) и (9.7), выражается только главным вектором дисбалансов D , при этом главный момент дисбалансов MD =0. Вектор D направлен радиально и
вращается вместе с ротором. Примером такого ротора может служить коленчатый вал одноцилиндровогоr двигателя внутреннего сгорания. Опоры
А и В нагружены силами FA и FB , векторы которых вращаются вместе с валом /13/.
r |
М |
|
N |
FA |
FB |
|
|||
В |
I |
rS |
S |
А I |
D
Рис. 9.2.
Статическую неуравновешенность легко обнаружить статическими испытаниями. Ротор цилиндрической формы устанавливают на два горизонтальных ножа (бруска). Если центр масс расположен вне оси цилиндра, то ротор будет поворачиваться, пока не займет положения устойчивого равновесия, при этом центр масс звена займет наинизшее положение /11/.
Устранить статическую неуравновешенность можно, если к ротору прикрепить дополнительную массу mк, называемую корректирующей. Ее необходимо разместить с таким условием, чтобы
15 |
Разработал Корчагин П.А. |

|
|
|
Dк = mкrrк = −D . |
|
|
(9.8) |
|
Центр корректирующей массы должен находиться на линии действия |
|||||||
r |
(рис. 9.3), а вектор rк должен быть направлен в сторону, |
||||||
OS вектора D |
|||||||
противоположную вектору |
rrS . |
|
|
|
|
||
|
|
Dк |
Иногда установку |
корректирующей |
|||
|
|
массы заменяют удалением массы mк. В |
|||||
|
|
|
этом случае центр удаленной массы и |
||||
mк |
|
r |
центр масс звена располагаются |
по одну |
|||
|
|||||||
|
|||||||
|
|
к |
сторону от оси вращения (точки О). |
||||
|
|
|
|||||
|
|
O |
Однако статическую балансировку не |
||||
|
|
всегда удается выполнить с помощью од- |
|||||
|
|
rS |
|||||
m |
|
ной корректирующей массы. Например, |
|||||
|
S |
для коленчатого вала |
одноцилиндрового |
||||
|
|||||||
|
|
|
двигателя внутреннего сгорания (см. рис. |
||||
|
|
D |
2.2) необходимо использовать две коррек- |
||||
|
|
тирующие |
массы в |
плоскостях |
M и N |
||
|
|
|
|||||
Рис. 9.3 |
(плоскостях коррекции), поскольку про- |
||||||
|
|
|
странство |
между |
этими плоскостями |
||
должно быть свободным для движения шатуна. В этом случае вектор Dк
должен быть равен сумме дисбалансов от двух корректирующих масс. Таким образом, число и расположение плоскостей коррекции выбирается в соответствии с конструкцией и назначением ротора /13/.
Моментально неуравновешенным называется ротор, центр масс S ко-
торого находится на оси вращения, а главная центральная ось инерции I – I ротора наклонена к оси вращения ротора под углом γ (рис. 9.4). При этом rS=0, JXZ≠0, JУZ≠0. Таким образом, моментальная неуравновешенность выражаетсяr толькоr главным моментом MD дисбалансов, т.е. парой дисба-
лансов DМ1 и DМ2 , которая вращается вместе с ротором. Примером моментально неуравновешенного ротора может служить двухколенчатыйr r вал двигателя. Главный момент дисбалансов такого вала равен MD = DМ1 h1 . Опоры А и В нагружены парой сил FA и FB , векторы которых вращаются вместе с валом /13/.
Моментальную неуравновешенность можно устранить, если использовать не менее чем две корректирующие массы, поскольку пару сил можно уравновесить только парой. Расположение корректирующих масс в плоскостях коррекции и их величины должны быть такими, чтобы дисбалансы корректирующих масс составили именно пару. Моменты корректирующих масс и моментr дисбалансов должны быть равны и противополож-
но направлены, т.е. MD = −MDк. Для ротора, изображенного на рис. 9.4
16 |
Разработал Корчагин П.А. |
r
момент MDк корректирующих масс должен быть направлен по часовой r
стрелке, поскольку MD направлен против часовой стрелки.
DМ1
|
|
|
I |
r |
М |
|
|
FB |
|
|
А |
В |
|
S |
|
|
|
||
|
|
|
r |
|
γ |
|
FA |
|
|
|
N |
I |
|
|
h1 |
|
|
|
|
|
r |
DМ2 |
|
|
DМ1 = - DМ2 |
|
|
Рис. 9.4
Динамически неуравновешенным называется ротору которого центр масс находится вне оси вращения и ось инерции наклонена к оси вращения, т.еr. rS≠0,r JXZ≠0, JУZ≠0. Динамическая неуравновешенность выражается через D и MD . Как известно из курса теоретической механики, данная неуравновешенность можетr rбыть выражена двумя скрещивающимися векторами дисбалансов D1 и D 2 , расположенными в двух плоскостях перпен-
дикулярных оси вращения и вращающихся вместе с ротором. Динамическая неуравновешенность может быть устранена двумя корректирующими массами, расположенными в плоскостях коррекции /13/.
Таким образом, устранение любой неуравновешенности: статической, моментальной и динамической проводится путем совмещенияr главной
центральной оси инерции с осью вращения ротора, т.е. D = 0 и MD = 0. В
случае выполнения этого условия ротор называется полностью сбалансированным. Причем, если ротор полностью сбалансирован для конкретной угловой скорости, то он будет полностью сбалансирован и для любой другой угловой скорости, как постоянной, так и переменной /13/.
9.3. Динамическая балансировка роторов при проектировании
Если условия эксплуатации машины (механизма) требуют использования полностью уравновешенного ротора, а конструктивно ротор неуравновешен, то балансировку такого ротора необходимо применять уже на стадии проектирования.
В качестве примера рассмотрим ротор (рис. 9.5), составленный из не-
17 |
Разработал Корчагин П.А. |

скольких деталей 1, 2, 3 вращающихся как единое целое. Массы деталей mi, координаты центров масс S: ri, ϕi и ai известны. Имея эти значения необходимо определить дисбалансы неуравновешенных масс по формуле
(9.5) /13/.
а) |
b1=l |
b3 |
|
У |
|
|
a3 |
|
|
|
|
|
|
|
b2 |
|
|
|
a1=0 |
|
a2 |
|
|
D |
k N |
ϕkN |
ϕkM |
|
|
|
|
|||
|
|
|
|
|
|
||
|
r |
D2 |
ϕ2 |
|
|
|
|
|
DkM |
|
|
|
|
||
|
S2 |
r2 |
ϕ3 |
r3 |
|
||
|
|
|
N |
||||
|
|
|
|
|
|
S3 |
|
|
|
|
|
|
|
|
D3 |
|
z |
ϕ1 |
r1 |
|
2 |
3 |
|
|
|
|
|
S1 |
1 |
|
|
||
|
|
|
|
|
|
|
||
|
|
M |
|
D1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
ϕkM |
У |
|
|
в) |
D3N |
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
D2N |
ϕkN |
У |
|
|
D1M |
r |
|
|
|
|
|
|
|
r |
DM |
|
|
|
|
|
|
|
D3M |
|
|
|
|
|
|
r |
DN |
|
D2M |
||
|
Рис. 9.5
Балансировка такой системы путем уравновешивания каждой массы отдельной корректирующей массой является нецелесообразной, поскольку в такой системе происходит частичное взаимное уравновешевание дисбалансов /13/.
Зададим две плоскости приведения M и N, перпендикулярные оси вращения z. Пусть плоскость М совпадает с деталью 1, а плоскость N рас-
18 |
Разработал Корчагин П.А. |
положенаr r от нееr на расстоянии l. К плоскостям M и N приведем дисбалансы D1 , D 2 и D3 неуравновешенных масс. Для этого заменим каждый из
векторов дисбалансов двумя, параллельными ему и расположенные в плоскостях M и N. Для этого используем формулы /13/:
|
|
|
DiM=Di bi / l ; |
|
|
|
|
||
|
|
|
DiN = Di ai / l . |
|
|
|
(9.9) |
||
|
Для ротора, изображенного на рис. 2.5, получим: |
|
|
||||||
|
|
D1M = D1 b1 / l = D1 ; |
|
|
|
|
|||
|
|
|
D2M = D2 b2 / l ; |
|
|
|
|
||
|
|
|
D3M = D3 b3 / l; |
|
|
|
|
||
|
|
|
D1N = D1 a1 / l = 0 , |
(a1 = 0) ; |
|
(9.10) |
|||
|
|
|
D2N = D2 a2 / l ; |
|
|
|
|
||
|
|
|
D3N = D3 a3 / l . |
|
|
r |
, D 2 , |
||
r |
После приведения пространственной системы дисбалансов |
D1 |
|||||||
D3 |
были получены две плоские системы, расположенные в плоскостях М |
||||||||
и N. Проведем сложение дисбалансов (рис.9.5 б,в) для каждой из плоско- |
|||||||||
стей /13/: |
3 |
|
|
|
|
|
|
|
|
|
r |
r |
r |
r |
|
r |
|
|
|
|
DM = ∑DiM |
= D1M +D2M |
+D3M ; |
|
|
||||
|
|
i=1 |
3 |
|
|
|
|
|
|
|
|
r |
r |
r |
r |
|
|
|
|
|
|
DN |
= ∑DiN |
= D2N +D3N . |
|
(9.11) |
|||
i=1
В результате неуравновешенность заданного ротора былаr представлена двумя скрещивающимися векторами дисбалансов DM и DM Такми об-
разом, представленный на рис. 2.5 ротор может быть уравновешен двумя корректирующими массами. Если разместить корректирующие массы в плоскостях приведения М и N, то они будут являться одновременно и плоскостями коррекции /13/.
Условия полной балансировки данного ротора будут иметь вид: |
|
r |
|
DkM = −DM ; Dk N = −DN . |
(9.12) |
Угловые координаты векторов корректирующих |
масс необходимо |
взять с плана дисбалансов (см. рис. 5 б, в). Сами корректирующие массы можно определить по формулам /13/:
mkM = DkM / r kM ; mkN = DkN / r kN , |
(9.13) |
где r kM и r kN – радиусы-векторы корректирующих масс, которые выби-
раются из конструктивных возможностей ротора.
Вместо корректирующих масс, при конструктивной возможности,
можно убрать (например высверлить) на линии действия векторов DkM и r
Dk N в диаметрально противоположном направлении часть материала ро-
19 |
Разработал Корчагин П.А. |

тора, соответствующее корректирующим массам mkM и mkN /13/.
9.4. Балансировка изготовленных роторов
Даже полностью сбалансированный на стадии проектирования ротор после изготовления обладает некоторой неуравновешенностью, в следствии погрешности изготовления, неоднородности материала. Данная неуравновешенность определяется экспериментальным путем и устраняется на специальных балансировочных станках /13/.
Рассмотрим балансировку ротора на балансировочном станке рамного типа. Балансируемый ротор устанавливается на раме балансировочного станка (рис. 2.6) таким образом, чтобы одна из плоскостей коррекции совпадала с плоскостью, содержащей ось колебания рамы О (например плоскость М). Измеренная при резонансе амплитуда колебаний рамы зависит в таком случае только от дисбаланса в плоскости коррекции N. Главный мо-
мент вынуждающей силы, относительно точки О, будет равен /11/: |
|
||
v v |
2 |
r |
(9.14) |
M = DNlω |
|
cos ωt , |
|
где ω – угловая скорость вращения ротора; l – расстояние между |
||
плоскостями коррекции. |
|
|
N |
M |
|
|
|
|
N |
|
|
|
N |
|
|
O |
|
|
l |
|
|
Рис. 9.6 |
|
Амплитуда вынужденных колебаний рамы будет пропорциональна |
||
амплитуде вынуждающего момента /11/: |
|
|
|
A = DNlω2 , |
(9.15) |
где k – коэффициент пропорциональности. |
|
|
20 |
Разработал Корчагин П.А. |

Проведем три испытания с измерением амплитуды вынужденных колебаний рамы для того, чтобы определить величину дисбаланса в плоскости N. При первом испытании определим амплитуду А1. При втором испытании установим в плоскости коррекции N в произвольном месте коррек-
тирующую массу с дисбалансом Dk , что соответствует дополнительно си- r
ле инерции Фk . Суммарная сила инерции Ф2 = Ф1 +Фk даст амплитуду
А2. После этого корректирующую массу переместим на 180°, при том же значении rk и проведем третье испытание. Получим амплитуду А3, соот-
ветствующую силе инерции Ф3 = ФN −Фk . Отложим силы инерции Ф1 и
Ф2 (рис. 9.7).
|
|
|
r |
|
а) |
б) |
d |
A3 |
c |
r |
Фk |
A |
|
A |
|
|
Ф |
|
|
r |
|||
1 αk |
|
|
2 |
b |
k |
A1 |
v |
|
|
|
|
|
|
ФN |
−Фk |
|
|
A |
|
|
v |
|
а |
|
1 |
|
|
|
|
|
|
|
||
Ф2 |
|
|
|
|
|
|
Рис. 9.7
Чтобы выполнялось условие Фk = −ФN необходимо повернуть вектор силы инерции корректирующей массы Фk на угол αk против часовой стрелки и изменить величину Dk /11/.
Для всех указанных выше сил инерции коэффициент пропорциональности одинаков. Поэтому можно рассматривать построение на рис. 9.7, а как геометрическое суммирование амплитуд /11/:
A2 = A1 +Ak ; |
|
A3 = A1 −Ak , |
(9.16) |
где Ak - амплитуда силы инерции Фk .
Выражение (9.6) представим в виде двух треугольников abd и bcd с общей стороной bd (рис. 9.7,б). Таким образом, для определения неизвестной амплитуды Ak необходимо отложить в произвольном направлении
отрезок ac, равный 2А1, найти точку d из условий ad = A2 и cd=A3 и соединить точку d с точкой b. Одновременно можно определить и угол αk.
Аналитически определить Ak и αk можно по формулам /11/:
A |
k |
= 0,707 A2 |
+A2 |
−2A2 |
; |
(9.17) |
|
2 |
3 |
1 |
|
|
21 |
Разработал Корчагин П.А. |

|
|
A2 |
+A2 |
−A2 |
|
|
|
|
|
||
α |
|
|
1 |
k |
1 |
|
. |
(9.18) |
|||
k |
= arccos |
|
2A A |
|
|
||||||
|
|
|
k |
|
|
|
|
||||
|
|
|
|
1 |
|
|
|
|
|
||
Таким образом, для устранения неуравновешенности в плоскости М |
|||||||||||
необходимо установить корректирующую массу с дисбалансом |
Dk |
A1 |
|
||||||||
Ak |
|||||||||||
|
|
|
|
|
|
|
|
|
|||
под углом αk или π + αk к первоначальному положению корректирующей массы с дисбалансом Dk /11/.
Аналогичным образом устраняется неуравновешенность в плоскости коррекции М. Для этого ротор устанавливается таким образом, чтобы ось качания рамы лежала в плоскости коррекции N /11/.
9.5. Уравновешивание гибкого ротора
Гибким называется ротор у которого расстояние между опорами значительно больше его диаметра. Для гибкого ротора при определении дисбаланса следует учитывать изгибные деформации как вала, так и самого ротора. Для того, чтобы выявить основные закономерности, связывающие деформации изгиба вала и дисбаланс ротора, рассмотрим вертикально установленный вал, на котором укреплен диск массой m (рис. 9.8). Центр
масс диска смещен от оси вала на рас-
|
|
|
|
|
стояние rS. Масса вала много меньше |
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
массы диска, поэтому ей пренебрегаем. |
||||||
|
|
|
|
|
Вал вращается с заданной угловой ско- |
||||||
|
|
|
|
|
ростью ω. Под действием центробежных |
||||||
|
|
|
|
|
сил инерции вал прогибается на величи- |
||||||
|
|
|
|
|
ну х. Прогиб вала и сила инерции Ф свя- |
||||||
|
|
|
|
|
заны между собой соотношением /11/: |
||||||
|
|
|
|
|
|
х = δ1 m (rS + x) ω2, |
(9.19) |
||||
|
|
|
|
S |
где |
||||||
|
|
|
|
δ1 – прогиб вала, вызванный единич- |
|||||||
|
|
|
|
|
|||||||
|
|
|
|
|
ной силой в рассматриваемом сечении. |
||||||
|
|
|
|
|
|
Отсюда |
ω2r |
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
x = |
|
|
. |
(9.20) |
|
х |
|
|
rS |
|
|
1 −ω2 |
|||||
|
|
|
|
|
δ1m |
|
|
||||
При некотором значении угловой скорости ω, знаменатель дроби (9.20) обращается в нуль, а прогиб вала х → ∞.
Рис. 9.8 Это значение ω называется критической угловой скоростью ωк /11/:
22 |
Разработал Корчагин П.А. |