


где rЯ = rД +rПУСК +rПР – полное сопротивление якорной цепи при тор-
можении.
Полагая Емакс. ≈ UH (торможение со скорости идеального холостого хо-
да), что ведёт к некоторому увеличению сопротивления ступени противовключения, и подставляя вместо IТ ток IТ.НАЧ, соответствующий μТ.НАЧ., получим
IТ.НАЧ |
≈ |
2U H |
|
rД +rПУСК +rПР |
|||
|
|
и
IТ.НАЧ −(rД +rПУСК ).
2.1.5.Расчёт пусковых сопротивлений асинхронных двигателей
Методика расчёта пусковых сопротивлений асинхронных двигателей
приведена в работах [1, с. 201-206; 2, с. 74-82; 3, с. 221-237].
На практике часто выполняется приближённый расчёт пусковых сопротивлений, полагая, что пуск асинхронного двигателя происходит на линейных участках механических характеристик. Поэтому расчёт пусковых сопротивлений асинхронных двигателей выполняется аналогично расчёту пусковых сопротивлений двигателей постоянного тока с независимым или параллельным возбуждением (см. пп. 2.1.3).
Отметим некоторые особенности расчёта.
Графический способ расчёта. Расчёт естественной механической характеристики двигателя производится по формуле
μе = |
|
2тk |
, |
(2.5) |
||
|
se |
+ |
ske |
|||
|
|
|
|
|||
|
|
ske |
se |
|
|
|
|
|
|
|
|
||
где μе – относительный момент двигателя не естественной характеристике; se – скольжение двигателя на естественной характеристике;
41
ske – критическое скольжение двигателя на естественной характеристике, приводится для данного двигателя в справочниках на электрические машины [4,5];
тk = |
M k |
– перегрузочная способность двигателя, приводится для |
|
||
|
M H |
|
данного двигателя в справочниках на электрические машины [4,5]; Мk – критический момент двигателя.
Задаваясь скольжениями se от 0 до 1, по формуле (2.5) вычисляют относительный момент двигателя для заданных скольжений и строят естественную механическую характеристику двигателя в двигательном режи-
ме: μе = f(se).
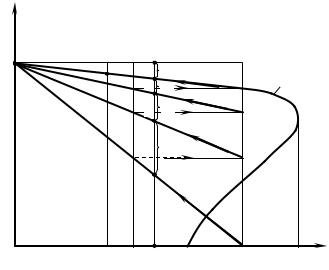
Построив естественную механическую характеристику и задавшись величиной пикового момента μ1 ≤ 0,85тk (при форсированном пуске) или величиной момента переключения μ2 ≥ 0,1μC (при нормальном пуске),
строят пусковую диаграмму двигателя.
Например, для схемы пуска двигателя в три ступени, приведённой на рис. 2.2, пусковая диаграмма будет иметь вид, показанный на рис. 2.6.
s
0 |
sc |
a |
ρр |
|
в |
ест. |
|||
|
|
c |
ρ3 |
|
|
|
|
||
|
|
d |
ρ2 |
|
|
|
e |
ρ1 |
|
|
|
|
|
1 |
f |
|
|
|
μс μ2 μ=1 |
μ1 |
μk μ |
||
0 |
Рис. 2.6. Пусковая диаграмма асинхронного двигателя при пуске в три ступени
42

Величину момента переключения μ2 при форсированном пуске, а при нормальном пуске величину пикового момента μ1, определяют по формулам:
μ2 = μλ1 ; μ1 = μ2λ,
где λ = μ1 .
μ2
При форсированном пуске:
λ = m s |
|
1 |
H |
μ . |
|
|
1 |
При нормированном пуске:
1 |
|
λ = m+1 sH μ2 |
, |
где т – число ступеней пуска;
sН – номинальное скольжение двигателя; приводится в справочниках на электрические машины [4,5].
Для определения сопротивлений ступеней пускового реостата необходимо вычислить номинальное активное сопротивление ротора:
RPH = |
EPH , |
(2.6) |
|
3 I PH |
|
где ЕРН, IРН – соответственно номинальная ЭДС и номинальный ток ротора; приводятся в справочниках по электрическим машинам [4,5].
Сопротивления ступеней пускового реостата для рассматриваемого примера определяются по формулам:
r1 = afde RРH , r2 = cdaf RРH , r3 = afвc RРH .
Полное сопротивление пускового реостата:
43
rПУСК = afве RРH .
Аналогично вычисляются сопротивления ступеней пускового реостата и при большем числе ступеней пуска двигателя.
Аналитический способ расчёта. Аналитический расчёт пусковых сопротивлений асинхронных двигателей выполняется аналогично, как и для двигателей постоянного тока с параллельным возбуждением (см.
пп. 2.1.3):
r1 = rРλm−1(λ −1),
r2 = rРλm−2 (λ −1),
r3 = rРλm−3 (λ −1),
……………
rm = rР (λ −1),
где rP – активное сопротивление обмотки ротора, приводится в справочниках по электрическим машинам [4,5].
2.1.6. Расчёт тормозных сопротивлений асинхронных двигателей
Тормозные сопротивления асинхронных двигателей могут быть рассчитаны двумя способами: графическим и графоаналитическим.
Методика расчёта тормозных сопротивлений асинхронных двигате-
лей изложена в работах [1, с. 254-260; 2, с. 82-89; 3, с. 252-276].
Для упрощения расчёта полагают, что торможение осуществляется на линейном участке механической характеристики. В этом случае расчёт тормозных сопротивлений проще выполнить графическим способом, который и рассматривается ниже.
44
Динамическое торможение
Динамическое торможение асинхронного двигателя может осуществляться двумя способами: с независимым возбуждением и с самовозбуждением. Однако торможение с самовозбуждением не нашло широкого применения вследствие высокой стоимости конденсаторов, подключаемых к обмотке статора двигателя для его осуществления.
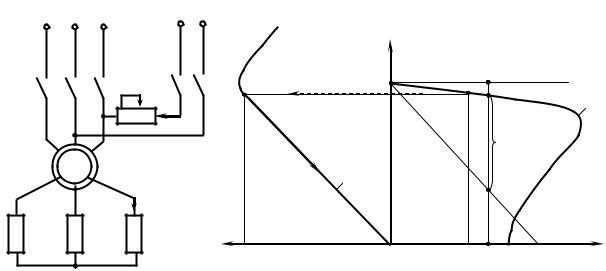
Для осуществления динамического торможения с независимым возбуждением обмотку статора вращающегося двигателя отключают от сети переменного тока и подключают к источнику постоянного тока. Обмотка ротора при этом может быть закорочена накоротко либо через добавочный резистор. Схема включения асинхронного двигателя с фазным ротором при динамическом торможении с независимым возбуждением имеет вид, представленный на рис. 2.7, а, а механические характеристики – на рис. 2.7, б. Для получения динамического торможения контактор КМ1 отключается и включается контактор КМ2.
~ 3
КМ1
М
– = U + |
|
|
|
|
|
s |
|
|
|
КМ2 |
0 |
sc |
a |
|
IП |
в |
ест. |
||
|
|
|
||
|
|
|
ρДТ |
|
|
д.т. |
|
c |
|
IP |
|
|
|
|
1 |
|
|
|
|
rД |
|
d |
|
|
|
|
|
||
–μ –μТ.НАЧ. |
0 |
μс |
μ=1 |
μ |
а) |
б) |
Рис. 2.7. Схема включения (а) и механические характеристики асинхронного двигателя естественная и динамического торможения при различных сопротивлениях в цепи ротора (б)
Расчёт сопротивления динамического торможения, включаемого в
цепь ротора асинхронного двигателя с фазным ротором для ограничения
45

тока ротора при торможении, графическим способом производится следующим образом (рис. 2.7, б):
1.Задаются начальным тормозным моментом μТ.НАЧ. ≤ 0,85тk .
2.Проводят характеристику динамического торможения через начало координат и точку с координатами [sс, μТ.НАЧ.].
3.В первом квадранте из точки s = 0 проводят прямую, параллельную линейному участку характеристики динамического торможения.
4.Находят отрезок, отсекаемый естественной характеристикой двигателя и характеристикой, параллельной характеристике динамического торможения при номинальном моменте двигателя (μ = 1) – отрезок «в-с»).
5.Вычисляют по формуле (2.6) номинальное сопротивление ротора двигателя.
6.Определяютсопротивлениединамическоготорможенияпоформуле
rДТ = adвс RРH .
Противовключение
Торможение противовключением асинхронного двигателя осуществляется тогда, когда обмотки статора включены на одно направление вращения, а двигатель вращается в обратную сторону.
При реактивном статическом моменте на валу двигателя для получения противовключения необходимо поменять направление момента двигателя на противоположное по отношению к двигательному режиму, изменив чередование фаз питающего двигатель напряжения переключением двух фаз между собой. При этом существенно возрастает ЭДС ротора, а следовательно, и ток ротора вследствие более быстрого пересечения обмоток ротора вращающимся полем статора. Для ограничения тока ротора в этом режиме в ротор асинхронного двигателя с фазным ротором вводится добавочное сопротивление – ступень противовключения, которая вместе с
46
пусковым сопротивлением ограничивает ток двигателя до допустимых пределов.
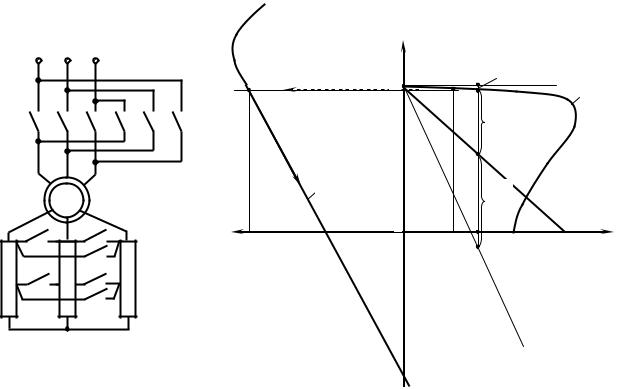
Схема включения асинхронного двигателя с фазным ротором в режиме противовключения показана на рис. 2.8, а, а механические характеристики естественная и противовключения – на рис. 2.8, б. Для получения противовключения контакторы КМ1, КМ3 и КМ4 отключаются и включается контактор КМ2.
~ 3 |
|
s |
|
|
|
|
|
0 |
sc |
a |
ρР |
|
|
|
в |
ест. |
|
|
|
|
|
||
КМ1 |
КМ2 |
|
|
ρПУСК |
|
|
|
|
|
c |
|
М |
|
пр |
|
|
ρПР |
|
|
|
|
|
|
|
|
1 |
μс |
d |
|
КМ4 |
–μ μТ.НАЧ. |
|
е |
μ=1 μ1 μ |
|
rпуск |
|
|
|
|
|
КМ3 |
|
|
|
|
|
rпр |
|
|
|
|
|
2
а) |
б) |
Рис. 2.8. Схема управления асинхронным двигателем с торможением противовключением (а) и механические характеристики двигателя естественная и противовключения (б)
Наиболее просто сопротивление ступени противовключения определяется графическим способом. Порядок определения следующий (см.
рис. 2.8, б):
1. Задаются (или он должен быть задан) начальным тормозным моментом в пределах: μТ.НАЧ. ≤ 0,85тk .
47

2.Строят линейную часть механической характеристики торможения противовключением по двум точкам с координатами [s = sС, μ = μТ.НАЧ.]
и[s = 2, μ = 0].
3.В первом квадранте проводят прямую, параллельную механической характеристике торможения противовключением и находят точку пересечения её с прямой μ = 1, соответствующей номинальному моменту двигателя (точка «е»).
4.Находят численное значение сопротивления ступени противовключения в относительных единицах, которое равно отрезку, отсекаемому
при μ = 1 первой искусственной характеристикой при пуске двигателя (s = 0, μ = 0; s = 1, μ = μ1) и прямой, параллельной механической характеристике противовключения (отрезок «с–е»).
5. Определяютсопротивлениеступенипротивовключенияпоформуле rПР = adсе RРH .
48