

Основные геодезические работы Глобальные позиционные системы
Точечное позиционирование
Коды псевдодальности
К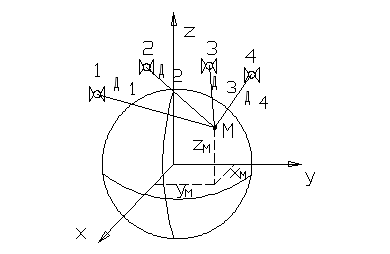 оординаты
спутников известны.
оординаты
спутников известны.
Измеряются
дальности:
![]() .
.
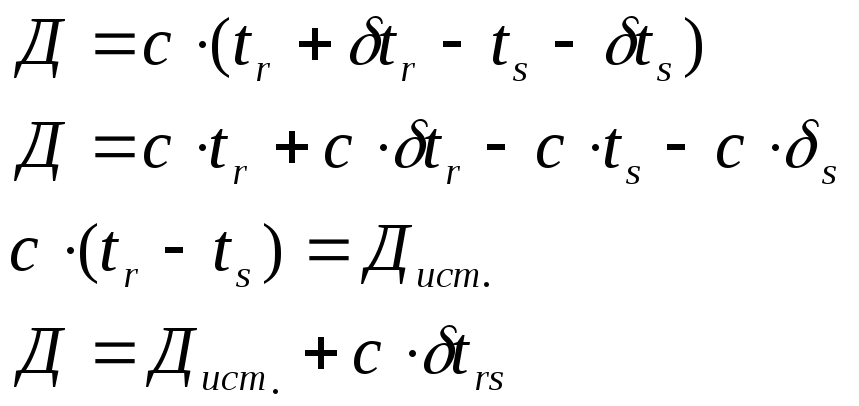
Используется импульсный метод:
![]() ,
,
т.к. имеют место временные задержки.
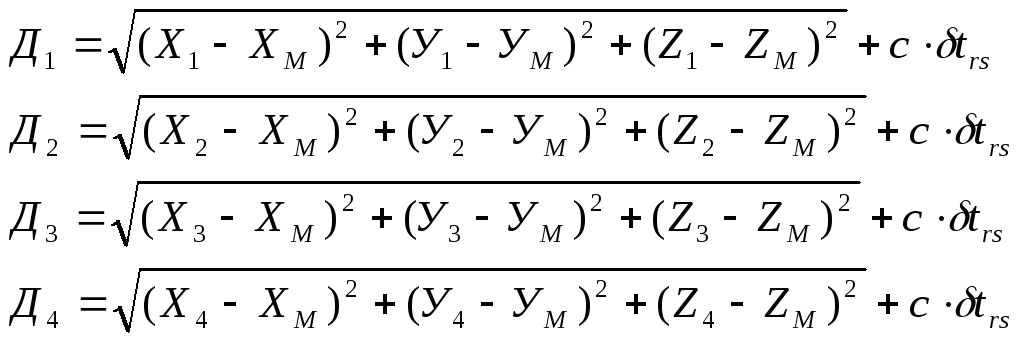
![]() –неизвестны,
–неизвестны,
![]() необходимо
для решения 4 уравнения (т.е. нужно не
менее 4 спутников).
необходимо
для решения 4 уравнения (т.е. нужно не
менее 4 спутников).
Если уравнений больше, решаем по методу наименьших квадратов, получаем обратную матрицу, диагональные элементы которой, являются весовыми коэффициентами, характеризующих точность определения положения точки М.
Фазы псевдодальности
Основа – фазовый метод.
– измеряется
![]()
![]()
![]()
![]()
![]()
![]()
![]() –измеряется;
–измеряется;
![]() –неизвестны.
–неизвестны.
Необходимо составить 4 уравнения:
![]()
![]()
![]()
![]() .
.
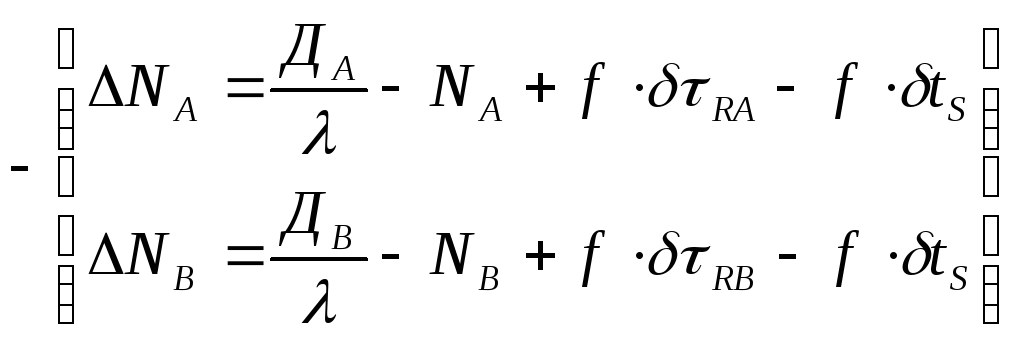
Относительное позиционирование
Определяем:
![]()
![]()
![]()
![]() I-е
разности:
I-е
разности:
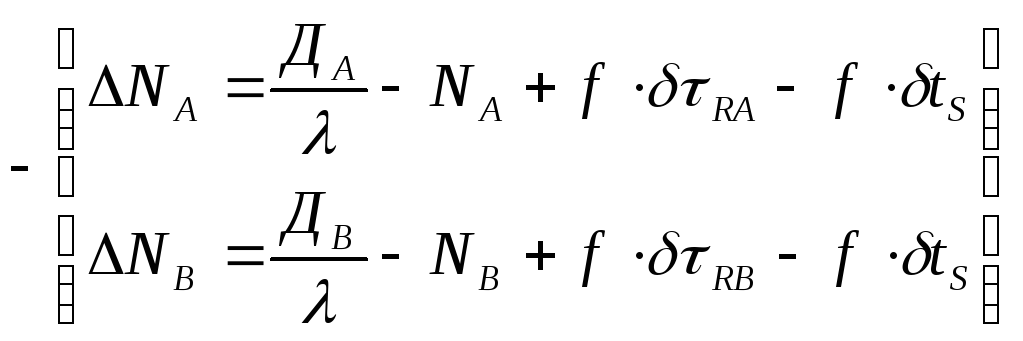
![]() –исключается
влияние задержки времени спутника.
–исключается
влияние задержки времени спутника.
II-е разности:
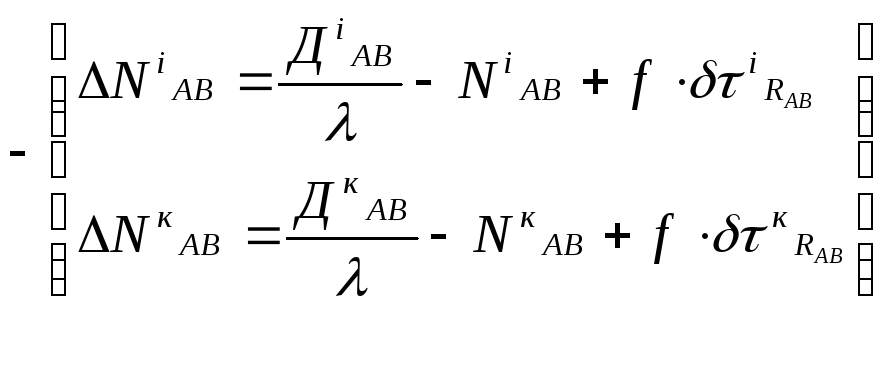
![]() –исключаем
время.
–исключаем
время.
Можно
исключить и
![]() – для этого используютIII-и
разности.
– для этого используютIII-и
разности.
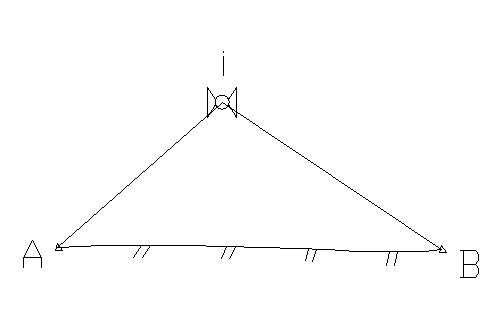
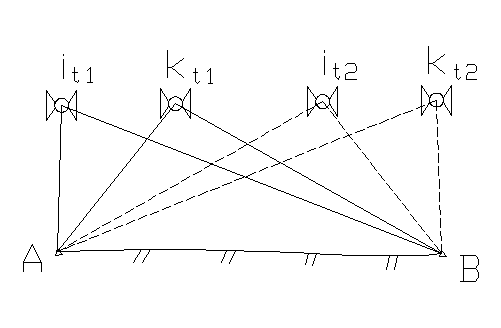
Суть,
заключается в следующем: точки А и В
наблюдают спутниками
![]() и
и![]() в моменты времени
в моменты времени![]() и
и![]() ,
так, разность
,
так, разность![]() очень мала и число неоднозначности
очень мала и число неоднозначности![]()
![]() .
.
Сингл–, дубль– и трипл–разности
Основная
формула:![]()
I разности:
![]()
![]() !
!
II разности:


![]() !
!
III разности:

![]() !
!
4 .Расчет числа эпох и спутников для относительного позиционирования
I
разности:
![]()
i-
спутник наблюдается nt-раз;
(nt
– число эпох)
![]() –
наблюдений; (ni
– число спутников).
–
наблюдений; (ni
– число спутников).
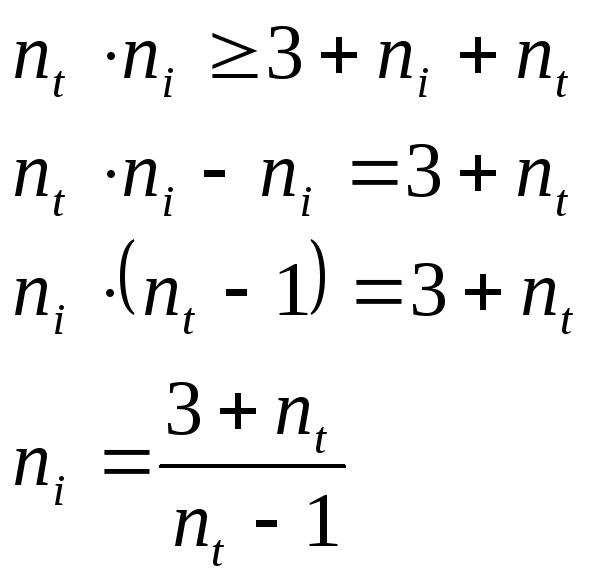
Для
II
разностей: ![]() .
.
5.Система координат и времени в GPS
Геодезическая система координат:
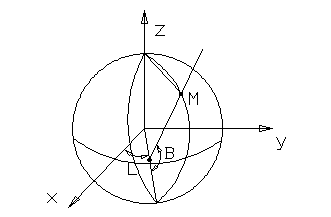
B – широта
L – долгота
Геоцентрическая система координат:

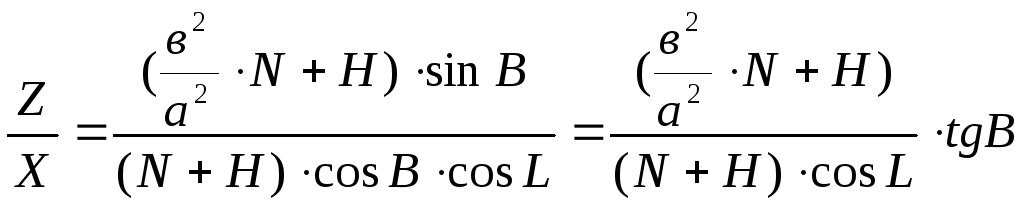
6. Формулы перехода из одной системы координат в другую
1.

2.
![]()
3.
![]()
4.
5.

6.![]()
 .
.
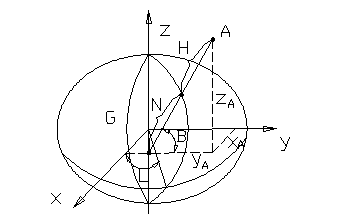
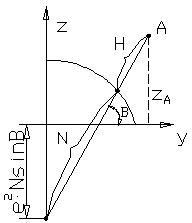
7. Переход из геоцентрической системы координат в геодезическую
Геоцентрическая система: X,Y,Z
Необходимо найти: B,L,H
1.

2.
![]()
3.
![]()
4.
5.
6.![]()
 .
.
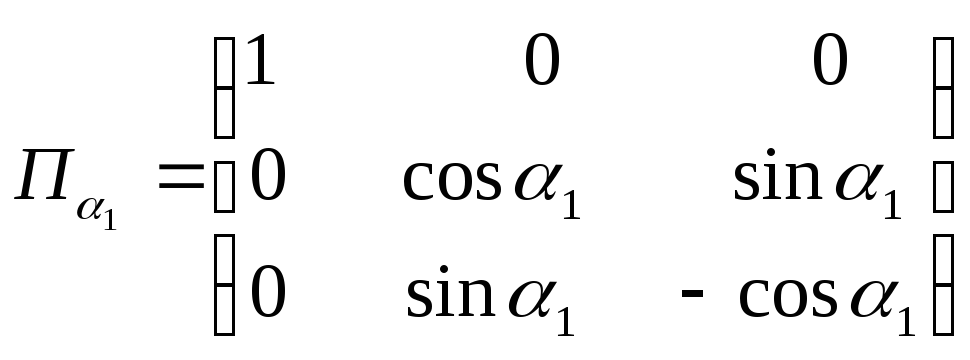
8. Связь между различными геоцентрическими системами координат

![]()
![]()
Имеем 7 неизвестных
Имея 3 точки, можем составить 9 уравнений
![]()
Аналогично
составляем
![]()
Необходимо привести к линейному виду:
а) задаться примерными значениями неизвестных:
![]()
![]()
б) раскладываем уравнение в ряд Тейлора:

Далее решаем по методу наименьших квадратов.
Триангуляция
1.Классификация геодезических сетей
1. Государственная геодезическая сеть:
– сети триангуляции 1,2,3 и 4 кл., полигонометрии, трилатерации
–нивелирные сети I,II,III и IV кл.
2. Геодезические сети сгущения
3. Съемочные сети
Схемы построения сетей триангуляции
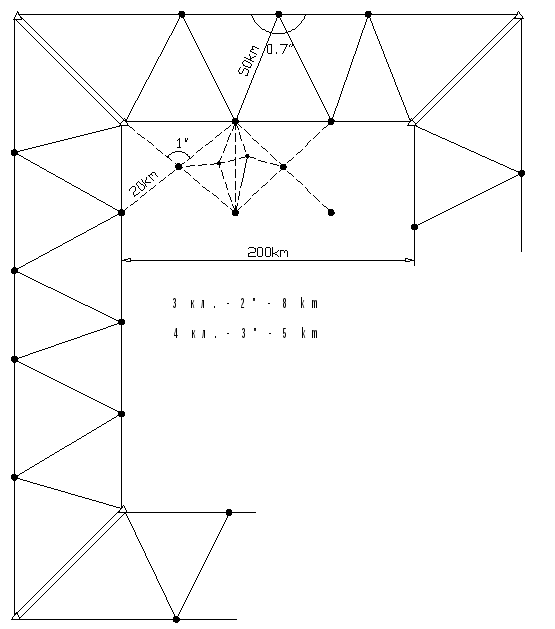
Проектирование и рекогносцировка геодезических сетей
Проектированию геодезических работ предшествует комплекс подготовительных мероприятий:
Получение технического предписания на проектирование работ
Сбор и изучение необходимых материалов
Геодезическое обследование района работ
Составление предварительного технического проекта
Проведение рекогносцировки
Составление окончательного технического проекта
Основное назначение рекогносцировки – уточнение камерального проекта путем изысканий на местности выгоднейшего варианта построения намеченной сети, окончательный выбор местоположения пунктов с установлением конструкции, высот знаков и типов подземных центров.
Руководящие документы при рекогносцировке:
– предварительный проект на участок работ
– техническое предписание на рекогносцировку
– действующее положение о построении ГГС
– специальные требования по выбору геодезических пунктов.