

3.11.2 Применение
В настоящее время двигатели с последовательным возбуждением применяются в электротяговом транспорте (трамваи, электровозы, механизмы перемещения мостов и тележек мостовых кранов). Постоянный ток здесь удобен тем, что при нём достаточно иметь только один провод (троллей), а последовательное возбуждение – по той причине, что двигатели не боятся больших снижений напряжений, при питании от троллеев на большие расстояния, и лучше выдерживают перегрузки на подъёмах пути, благодаря тому, что при росте тока двигателя момент возрастает сильнее.
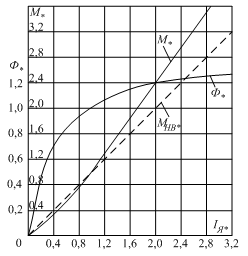
Рисунок 3.39 - Универсальные характеристики
Двигатели последовательного возбуждения более надёжнее, чем другие машины постоянного тока, т.к. обмотка возбуждения выполняется проводом большого сечения с малым напряжением между витками.
3.11.3 Построение характеристик
Для получения общего характера зависимостей можно воспользоваться кусочно- линейной апроксимацией кривой намагничивания двигателя Ф*=f(Iя*).
Первый
участок Iя*<0,3
М*<0,15
(ненасыщенная магнитная система) может
быть с достаточной точностью апроксимирован
прямой
![]() .
.
Тогда
![]() .
Уравнения характеристик имеют вид:
.
Уравнения характеристик имеют вид:

– уравнение скоростной характеристики.
Т.к.

– уравнение механической характеристики.
Таким
образом, при малых нагрузках, когда Iя*
<0,3
скоростная и механическая характеристики
представляют собой кривые гиперболического
типа, одной из асимптот которых является
ось ординат. Вторую асимптоту
рассматривать не имеет смысла, так как
она соответствует Iя*
>∞,
т. е. таким величинам тока якоря и момента,
которые лежат за пределами аппроксимации.
Из уравнений характеристики следует,
что при I
![]() 0
и М
0
и М
![]() 0,
т. е. при идеальном холостом ходе, скорость
двигателя неограниченно возрастает
(ω
0,
т. е. при идеальном холостом ходе, скорость
двигателя неограниченно возрастает
(ω![]() ∞).
В действительности скорость двигателя
даже при идеальном холостом ходе будет
конечной, так как приI
∞).
В действительности скорость двигателя
даже при идеальном холостом ходе будет
конечной, так как приI
![]() 0
имеем
Ф
0
имеем
Ф
![]() Фост.
Наличие остаточного потока определяет
следующую величину скорости идеального
холостого хода
Фост.
Наличие остаточного потока определяет
следующую величину скорости идеального
холостого хода
![]() .
.
Обычно
Фост.=0,02÷0,09,
в связи с чем ω0
– может в десятки раз превышать
номинальную скорость. Такое превышение
скоростидвигаетля недопустимо по
условиям прочности коллектора и бандажей,
крепящих обмотку якоря. Для выпускаемых
двигателей
![]() .
.
В связи с этим ограничивается область применения рассматриваемых двигателей. Их нельзя применять для привода механизмов, у которых возможен режим холостого хода. Для устранений возникновения разноса в приводах с двигателями последовательного возбуждения недопустимо применение ремённых, клиноремённых и цепных передач.
Определим
жёсткость для начального участка, для
этого выразим момент из уравнения
механической характеристики

Отсюда
– жёсткость механической характеристики переменная. По мере снижения скорости растёт модуль абсолютной жёсткости характеристик.
Второй
участок линейной апроксимации
характеристики кривой намагничивания
Ф*=f(Iя*)
соответствует значениям тока Iя*
>1,3
М*
>1,4.
Для этого участка
![]() .
Уравнения характеристик на этом участке
.
Уравнения характеристик на этом участке
 -
скоростная характеристика
-
скоростная характеристика
 -
механическая
характеристика
-
механическая
характеристика