

5.6 Определение допустимой частоты включения короткозамкнутых асинхронных двигателей
При малых продолжительностях цикла повторно-кратковременных режимов возрастает доля пусковых и тормозных потерь в общем балансе потерь энергии за цикл и лимитирующими режим в тепловом отношении становятся длительности цикла или число включений двигателя в час. Учет этих ограничений особенно важен в приводах с большой частотой включений короткозамкнутых асинхронных двигателей.
В приводах некоторых механизмов возникает необходимость по условиям технологического процесса в частоте включения двигателя 600 — 800 в 1 ч. Более того, в таких режимах падает эффективность охлаждения самовентилируемых двигателей, что требует учета при проверке по допустимой частоте включений.
Определение допустимого числа включений двигателя в час проведем, сравнив при этом энергию потерь за цикл с энергией, отводимой в охлаждающую среду, при этом предположим, что гарантируются малые отклонения температуры двигателя от среднего уровня.
Потери
энергии в двигателе за цикл состоят из
потерь энергии при пуске
![]() и
торможении
и
торможении
![]() ,
а
также потерь за время установившегося
режима
,
а
также потерь за время установившегося
режима
![]() .
Пусть
мощность при номинальной скорости,
отводимая в окружающую среду, есть
.
Пусть
мощность при номинальной скорости,
отводимая в окружающую среду, есть
![]() .
Тогда в период паузы из-за ухудшения
теплоотдачи самовентилируемого
двигателя мощность теплоотвода будет
.
Тогда в период паузы из-за ухудшения
теплоотдачи самовентилируемого
двигателя мощность теплоотвода будет![]() ,
а в период пуска и торможения
,
а в период пуска и торможения![]() .
Представим
баланс энергий за цикл в виде
.
Представим
баланс энергий за цикл в виде
![]() ,
(
5.35)
,
(
5.35)
где
![]() —
время пуска и торможения;
—
время пуска и торможения;![]() —
время
установившейся работы;
—
время
установившейся работы;
![]() —
время паузы.
—
время паузы.
Представим параметры цикла следующим образом:

где h— число включений в час.
Подставляя
в (5.35) значения
![]() и
и![]() и
решая его относительноh
, получаем
и
решая его относительноh
, получаем
 .
(5.36)
.
(5.36)
Для
асинхронного двигателя с короткозамкнутым
ротором третьим членом знаменателя
можно пренебречь по сравнению с
![]() ,
так какон
не
превышает 2 - 4 % этой суммы, поэтому
,
так какон
не
превышает 2 - 4 % этой суммы, поэтому
 .
(5.37)
.
(5.37)
Если
в установившемся режиме двигатель
работает с номинальной
![]() формулу
(9.123) можно упростить, и она примет
вид
формулу
(9.123) можно упростить, и она примет
вид
 .
(5.38)
.
(5.38)
Из
(5.37) видно, что число включений в час
зависит от статической нагрузки,
определяющей мощность потерь
![]() ,
относительной продолжительности
включения
,
относительной продолжительности
включения![]() ,
коэффициента ухудшения теплоотдачи
,
коэффициента ухудшения теплоотдачи![]() и
от потерь энергии в переходных режимах.
и
от потерь энергии в переходных режимах.
С
уменьшением
![]() возрастаетh,
достигая наибольшего значения при
холостом ходе. На допустимое число
включений в час существенно влияют
потери энергии в переходных режимах,
так как они пропорциональны моменту
инерции привода, поэтому с ростом ,
возрастаетh,
достигая наибольшего значения при
холостом ходе. На допустимое число
включений в час существенно влияют
потери энергии в переходных режимах,
так как они пропорциональны моменту
инерции привода, поэтому с ростом ,
![]() уменьшается
допустимое число включений.
уменьшается
допустимое число включений.
Из
(5.37) следует также, что при
![]() допустимая
частота включений не зависит от
допустимая
частота включений не зависит от![]() .
Когда
.
Когда![]() ,
то с ростом
,
то с ростом![]() можно
допустить большее число включений.
Наконец, если
можно
допустить большее число включений.
Наконец, если
![]() ,
то с ростом
,
то с ростом
![]() уменьшаетсяh.
Для номинальной нагрузки в установившемся
режиме с ростом
уменьшаетсяh.
Для номинальной нагрузки в установившемся
режиме с ростом
![]() допустимая
частота включений уменьшается.
допустимая
частота включений уменьшается.
Увеличение допустимой частоты включений достигается независимой вентиляцией двигателя, действующей одинаково интенсивно в течение всего цикла работы электропривода. Существенного увеличения h можно добиться путем уменьшения потерь энергии в переходных процессах. В этом отношении, как указывалось, частотное управление асинхронным двигателем с короткозамкнутым ротором по сравнению с другими способами управления обеспечивает минимальные потери в переходных процессах. Исследования показали, что практически потери энергии за время переходного процесса достигают минимума при токах, приблизительно в 1,5 — 2 раза больших номинального, и оптимальном абсолютном скольжении. В большинстве случаев именно эти значения токов статора и обусловливают максимально допустимую частоту включений асинхронного двигателя с короткозамкнутым ротором при частотном управлении.
Для частотно-управляемого асинхронного привода допустимая частота включений оказывается в несколько раз больше по сравнению с допустимой частотой включений при прямом пуске двигателя от сети с неизменной частотой и амплитудой напряжения и торможением противовключением.
Примеры решения задач
Применительно к схеме рис. 1, рассчитать значения приведённого к валу электродвигателя момента инерции элементов механического передаточного устройства J и приведённого к валу электродвигателя момента нагрузки (сопротивления) Мс при подъёме груза.
Дано:
моменты инерции двигателя Jд вместе с муфтой М1 и шестерней z1 равны 0,15 кг × м2;
передаточное число редуктора ip = z2 / z1 = 86/14 = 6,14;
КПД редуктора ηр = 0,97 и барабана ηб = 0,95;
скорости двигателя W = 93 рад/с и подъёма груза Vи.о = 0,1 м/с;
масса груза вместе с крюком m = 850 кг.

Рис. 1. Схема механической части электропривода:
ЭД – двигатель; М1, М2 – соединительные муфты; Р – редуктор; Б – барабан; К – канат; Кр – крюк лебёдки.
Решение:
Приведённый момент нагрузки Mс, Н × м, определяем по формуле 2:
где g = 9,81 м/с2 – ускорение силы тяжести.
Приведённый к валу электродвигателя момент инерции J (кг ×м2) находим по формуле 3:
При спуске груза приведённый момент нагрузки Мс должен быть рассчитан по формуле
![]() ,
,
а момент инерции остаётся неизменным.
Пример 1
Рассчитать и построить естественную электромеханическую характеристику двигателя постоянного тока независимого (параллельного) возбуждения, имеющего следующие паспортные данные: Рном = 2,2 кВт; Uном = 220 В; Iном = = 13А; nном = 1000 об./мин; ηном = 77 %; Iв. ном = 0,7А; Rо.в = 300 Ом.
Решение
Для построения искомой характеристики, которая представляет собой прямую линию, достаточно определить координаты двух точек: номинального режима и идеального холостого хода.
Для точки номинального режима определяем номинальную угловую скорость ωн,, рад/с:
![]()
![]()
номинальный момент Mн, Н × м:

![]()
номинальное сопротивление ДПТ, Rн, Ом:
![]()
![]()
Далее по приближённой формуле находим сопротивление якорной цепи:
![]()
Rя = 0,5 × 17 (1 – 0,77) = 2 Ом.
Определяем значение kΦном, В × с/рад:
![]()
![]()
Скорость идеального холостого хода равна
![]()

По координатам точек холостого хода (ω0, 0) и номинального режима (ωном, Iном) на рис. 1 построена естественная электромеханическая характеристика ДПТ независимого возбуждения.
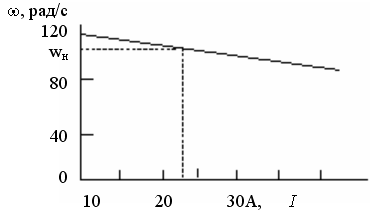
Рис. 1. Естественная электромеханическая (скоростная) характеристика двигателя
Пример 2
Рассчитать и построить естественные характеристики ДПТ последовательного возбуждения, имеющего следующие данные: Рном = 3 кВт; nном = 960 об./мин; Uном = 220 В; Iном = 19 А; ηном = 0,89.
Решение
1. Определяем номинальные угловую скорость ωном и момент Мном:
![]()
![]()

![]()
2. Воспользуемся универсальными характеристиками двигателя постоянного тока последовательного возбуждения (рис. 2) и составим таблицу для расчётов:
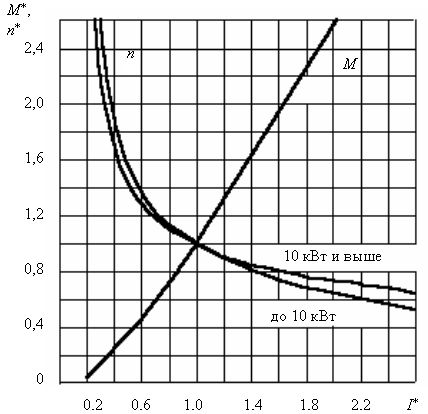
Рис.2. Универсальные характеристики двигателей постоянного тока последовательного возбуждения
|
1 |
I* |
0,4 |
0,8 |
1,2 |
1,6 |
2 |
|
2 |
M* |
0,3 |
0,8 |
1,25 |
1,7 |
2,38 |
|
3 |
ω* |
2,1 |
1,2 |
0,9 |
0,7 |
0,6 |
|
4 |
ω = ω* × ωном |
210 |
120 |
90 |
70 |
60 |
|
5 |
M = M* × Mном |
9 |
24 |
36 |
48 |
60 |
|
6 |
I = I* × Iном |
7,6 |
15,2 |
22,8 |
30,4 |
38 |
Первые три строки таблицы заполняются с помощью характеристик рис. 3. Данные строк 4-6 получаются умножением относительных значений величин на номинальные значения соответствующих координат ДПТ. По данным строк 4 и 6 таблицы, а построена естественная электромеханическая, а по данным строк 4 и 5 – естественная механическая характеристики ДПТ (рис. 3 а, б).
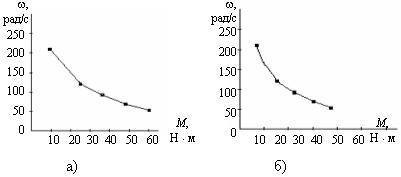
Рис. 3. Механическая характеристика а) и электромеханическая характеристика б)
Задача 4.1.
Рассчитать естественную механическую характеристику асинхронного двигателя с фазным ротором типа МТН611-6 краново-металлургической серии и построить пусковые характеристики при реостатном пуске в 3 ступени. Определить величины пусковых сопротивлений.
Основные данные двигателя:
Номинальная
мощность при работе в длительном режиме
-75 кВт, номинальная скорость вращения
![]() =950
об/мин, напряжение статора
=950
об/мин, напряжение статора![]() =380
В, номинальное напряжение на кольцах
ротора
=380
В, номинальное напряжение на кольцах
ротора![]() =270
В, максимальный момент двигателя
=270
В, максимальный момент двигателя![]() =2610
Н*м, номинальный ток ротора
=2610
Н*м, номинальный ток ротора![]() =108
А. Момент сопротивления на валу двигателя
при пуске принять равным номинальному
моменту двигателя.
=108
А. Момент сопротивления на валу двигателя
при пуске принять равным номинальному
моменту двигателя.
Номинальный момент двигателя
![]() ,
,
где
![]() .
.
Перегрузочная способность двигателя:
![]() .
.
Номинальное скольжение
![]() .
.
Критическое скольжение на естественной характеристике
![]() .
.
Расчет естественной характеристики производим по формуле
 .
.
Таблица 4.1 Расчет естественной механической характеристики
|
|
1 |
0.8 |
0.6 |
0.4 |
0.33 |
0.2 |
0.1 |
0.05 |
|
|
3.0 |
2.42 |
1.81 |
1.21 |
1 |
0.6 |
0.3 |
0.15 |
|
|
0.33 |
0.41 |
0.55 |
0.82 |
1 |
1.65 |
3.3 |
6.6 |
|
|
2.07 |
2.44 |
2.93 |
3.4 |
3.46 |
3.21 |
1.92 |
1 |
Построенная по расчетным данным естественная механическая характеристика представлена на рис. 4.13.
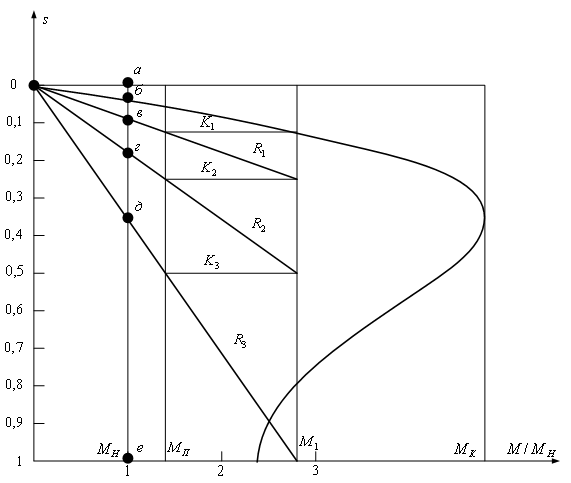
Рисунок 4.13 - Естественная и пусковые механические характеристики асинхронного двигателя с фазным ротором
Пример задачи
|
|
|
|
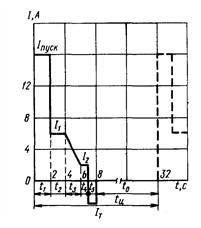
Проверить пригодность краново-металлургического асинхронного трехфазного электродвигателя типа MTF112-6 с фазным ротором, предназначенного для привода механизма, работающего по графику рис 18. Электродвигатель имеет следующие номинальные данные:
Р2ном =5 кВт; ηном.= 75%; cosφ= 0,7; ПВном=40%; nном =930 об/мин;
U1= 380В.
Решение.
Эквивалентный ток за время работы одного цикла:
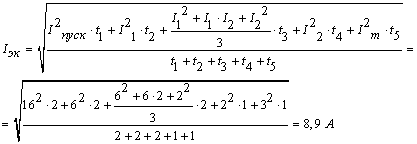
Продолжительность включения электродвигателя с учетом поправок на ухудшение условий охлаждения в период пуска, торможения и паузы
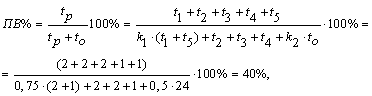
где
tц
— время цикла (tц
=tР
+ tо);
![]() =
0,75;
=
0,75;![]() =
0,5.
=
0,5.
Номинальный ток электродвигателя

Так
как
![]() при
ПВ%=40%, то электродвигатель проходит по
нагреву и пригоден для привода механизма,
работающего в данных условиях.
при
ПВ%=40%, то электродвигатель проходит по
нагреву и пригоден для привода механизма,
работающего в данных условиях.