

1. Основные сведения. История развития ЭП
1.1 Общая структура ЭП…………………………………………………………………………………………………………………………………………2
1.2 Требования к ЭП…………………………………………………………………………………..………………………………………………………. 3
1.3 Классификация ЭП…………………………………………………………………………………..………………………………………………………4
2. Механика привода
2.1 Состав механической части ЭП……………………………………………………………………………………………………………………….7
2.2 Приведение моментов сопротивления и сил к одной оси вращения…………………………………………………………8
2.3 Приведение моментов инерции к одной оси вращения………………………………………………………………………………10
2.4 Основные уравнения движения ЭП………………………………………………………………………………………………………………..11
2.5 Уравнения движения привода при переменном моменте инерции…………………………………………………………..14
2.6 Механические характеристики производственных механизмов и электродвигателей…………………………….14
2.7 Установившийся режим работы электропривода…………………………………………………………………………………………17
2.8 Статическая устойчивость ЭП…………………………………………………………………………………………………………………………..19
2.9 Переходные режимы работы ЭП……………………………………………………………………………………………………………………20
2.10 Время ускорения и замедления привода……………………………………………………………………………………………………..21
3. Электропривод постоянного тока
3.1 Механические характеристики ДПТ НВ……………………………………………………………………………………………………………23
3.2 Построение естественных характеристик двигателя…………………………………………………………………………………..24
3.3 Уравнение характеристик двигателя в относительных единицах………………………………………………………………26
3.4 Основные показатели регулирования скорости ЭП………………………………………………………………………………………..27
3.5 Регулирование скорости ДПТ НВ……………………………………………………………………………………………………………………..28
3.6 Регулирование скорости ДПТ НВ изменением магнитного потока……………………………………………………………….38
3.7 Регулирование скорости ДПТ НВ изменением напряжения якоря………………………………………………………………41
3.8 Система источник тока – двигатель (ИТ-Д)…………………………………………………………………………………………………….49
3.9 Реостатный пуск ДПТ НВ………………………………………………………………………………………………………………………………….54
3.10 Тормозные режимы ДПТ НВ…………………………………………………………………………………………………………………………56
3.11 Электропривод с ДПТ ПВ………………………………………………………………………………………………………………………………65
3.12 Регулирование скорости ДПТ ПВ изменением сопротивления якоря………………………………………………………67
3.13 Регулирование скорости изменением напряжения…………………………………………………………………………………..69
3.14 Регулирование скорости ДПТ ПВ шунтированием обмотки якоря или обмотки возбуждения……………….70
3.15 Пуск ДПТ ПВ……………………………………………………………………………………………………………………………………………………71
3.16 Механические характеристики ДПТ ПВ в тормозных режимах………………………………………………………………….73
3.17 Особенности статических характеристик двигателя со смешанным возбуждением ……………………………….76
4. Электропривод переменного тока
4.1 Принцип работы АД………………………………………………………………………………………………………………………………………..77
4.2 Эквивалентные схемы замещения…………………………………………………………………………………………………………………78
4.3 Механические характеристики АД………………………………………………………………………………………………………………….80
4.4 Механические характеристики АД в тормозных режимах…………………………………………………………………………….81
4.5 Пуск АД с фазным ротором………………………………………………………………………………………………………………………………87
4.6 Регулирование скорости АД…………………………………………………………………………………………………………………………….91
4.7 Механические характеристики СД………………………………………………………………………………………………………………..106
4.8 Регулирование скорости синхронного ЭП……………………………………………………………………………………………………..109
5. Выбор электродвигателей
5.1 Уравнение нагрева электродвигателя…………………………………………………………………………………………………………..110
5.2 Номинальные режимы работы электродвигателей…………………………………………………………………………………….113
5.3 Выбор по роду тока и принципу действия, конструктивному исполнению и внешним воздействиям…….121
5.4 Определение расчетной мощности и выбор двигателя…………………………………………………………………………………123
5.5 Проверка двигателей на достаточность пускового момента и перегрузочную способность……………………..131
5.6 Определение допустимой частоты включения короткозамкнутых асинхронных двигателей…………………..131
1. Основные сведения. История развития электропривода
1.1 Общая структура электропривода
Нельзя представить себе ни одного современного производственного механизма, в любой области техники, который не приводился бы в действие автоматизированным электроприводом. В электроприводе основным элементом, непосредственно преобразующим электрическую энергию в механическую, является электрический двигатель. Электродвигатель чаще всего управляется при помощи соответствующих преобразовательных и управляющих устройств с целью формирования статических и динамических характеристик электропривода, отвечающих требованиям производственного механизма. Речь идет не только о сообщении машине вращательного или поступательного движения, но, главным образом, об обеспечении с помощью автоматизированного электропривода оптимального режима работы машин, при котором достигается наибольшая производительность при высокой точности.
Назначение. Электропривод — это управляемая электромеханическая система. Ее назначение — преобразовывать электрическую энергию в механическую и обратно и управлять этим процессом.
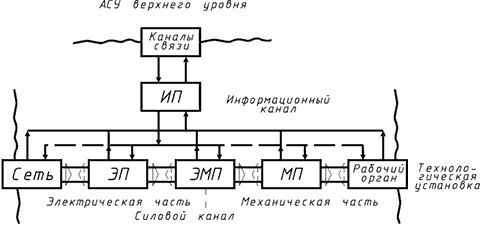
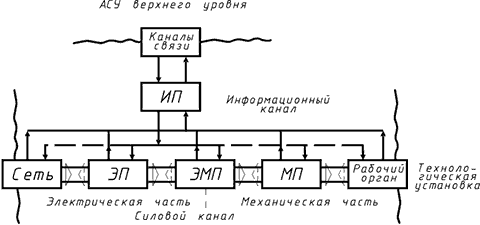
Состав. Структурная схема автоматизированного электропривода приведена на рисунке 1.
Начало формы
Конец формы




![]()
![]()
![]()
![]()
![]()
Рисунок 1. Общая структура электропривода:
ЭП – электрический преобразователь; ЭМП – электромеханический преобразователь; МП – механический преобразователь; ИП – информационный преобразователь; СЭС – система электроснабжения; ТП – тиристорный преобразователь; ПЧ – преобразователь частоты; АД – асинхронный двигатель; СД – синхронный двигаетель; ДПТ – двигатель постоянного тока; КШМ – кривошипно-шатунный механизм.
В электроприводе всегда можно выделить два канала – силовой и информационный. По первому передаётся преобразуемая энергия (широкие стрелки на рисунке 1), по второму осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика её неисправностей (тонкие стрелки на рисунке 1).
Силовой канал в свою очередь состоит из двух частей – электрической и механической и обязательно содержит связующее звено – электромеханический преобразователь.
В электрическую часть силового канала входят устройства, передающие электрическую энергию от источника питания (шин промышленной электрической сети, автономного электрического генератора, аккумуляторной батареи и т. п.) к электромеханическому преобразователю и обратно и осуществляющие, если это нужно, преобразование электрической энергии.
Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором полезно реализуется полученная механическая энергия.
Информационный канал содержит устройства ввода, вывода, преобразования информации, связи с силовым каналом.
Электропривод как система. Электропривод представляет собой вполне определенный класс технических систем. Как и всякая техническая система – упорядоченное, целесообразное сочетание взаимосвязанных и взаимодействующих частей целого, электропривод, с одной стороны, состоит из определенных элементов и, с другой стороны, сам входит в качестве элемента (подсистемы) в другие, более крупные системы.
Элементами электропривода являются электрические, электромеханические, механические и информационные преобразователи и устройства связи с внешними взаимодействующими системами (Рисунок 1).
Начало формы
Конец формы



![]()
![]()
![]()
![]()
![]()
Рисунок 1. Общая структура электропривода:
ЭП – электрический преобразователь; ЭМП – электромеханический преобразователь; МП – механический преобразователь; ИП – информационный преобразователь; СЭС – система электроснабжения; ТП – тиристорный преобразователь; ПЧ – преобразователь частоты; АД – асинхронный двигатель; СД – синхронный двигаетель; ДПТ – двигатель постоянного тока; КШМ – кривошипно-шатунный механизм.
Электропривод взаимодействует системой электроснабжения (и связан с ней участком электрической сети) или источником электрической энергии, с одной стороны, с технологической установкой или машиной (и связан с ней через рабочий орган), с другой стороны, и наконец, с информационной системой более высокого уровня, часто с человеком оператором (и связан с ней соответствующими каналами связи), с третьей стороны (Рисунок 1).
Определение. Электропривод — электромеханическая система, состоящая в общем случае из взаимодействующих электрических, электромеханических и механических преобразователей, управляющих и информационных устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.