

3.10 Тормозные режимы двигателя постоянного тока независимого возбуждения
Режимы электрического торможения служат
· для поддержания скорости, когда на валу двигателя действует активный момент;
· для уменьшения скорости вращения привода;
· для остановки привода.
Во время торможения или перемены направления движения электродвигатель работает в тормозном режиме на одной из механических характеристик, соответствующих осуществляемому способу торможения.
Электродвигатели постоянного тока независимого возбуждения могут работать в трех тормозных режимах: режиме рекуперативного торможения, динамического торможения и торможения противовключением.
3.10.1 Рекуперативное торможение (генераторное торможение с отдачей энергии в сеть)
Режим рекуперативного генераторного торможения имеет место, когда скорость двигателя превышает скорость холостого хода ω>ω0 . При этом э.д.с. якоря Ея превышает величину напряжения питания якорной цепи Ея=кФн·ω>Uя= кФн·ω0 и ток в якорной цепи пойдет под действием э.д.с. якоря Ея;
![]()
знак тока будет противоположен знаку напряжения питания, что означает, что энергия торможения отдается в сеть питания постоянного тока. Отсюда следуют три условия существования режима рекуперативного торможения.
1. Цепь питания должна обеспечивать возможность протекания тока встречно напряжению источника питания; это условие особенно важно в случае питания двигателя постоянного тока от полупроводниковых преобразователей, элементы которых обладают односторонней проводимостью тока.
2. Источник питания должен обладать возможностью воспринимать отдаваемую двигателем энергию и передавать ее в питающую сеть; так режим рекуперативного торможения невозможен, если привод получает питание от автономной дизель-генераторной установки.
3. Для того чтобы рекуперативное торможение было возможно в пределах заданного диапазона регулирования скорости, регулирование должно производиться путем изменения напряжения, подводимого к якорной цепи двигателя. В режиме рекуперативного торможения уравнения характеристик, учитывая, что Iя и момент М будут отрицательны. Если обозначить тормозной момент через Мт=-М, то уравнение механической характеристики при ω>ω0 будут иметь вид:
![]()
Первый член в правой части уравнения показывает, что механическая характеристика двигателя в режиме рекуперативного торможения проходит через точку, соответствующую угловой скорости идеального холостого хода, как и в двигательном режиме. Наклон механической характеристики определяется сомножителем
![]() ,
,
который по абсолютному значению (при заданном сопротивлении R) остаётся неизменным. Следовательно, наклон механической характеристики в тормозном режиме будет таким же как и в двигательном. Поэтому графически механические характеристики двигателя в режиме торможения с отдачей энергии в сеть являются продолжением характеристик двигательного режима в область второго квадранта.
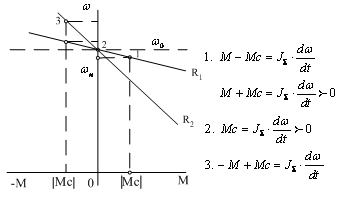
Рисунок 3.29 - Механические характеристики при рекуперативном торможении
Пример: спуск лёгкого груза (силовой спуск). Двигатель включён на спуск, момент, развиваемый двигателем и грузом направлены согласно, т.е. двигатель дополнительно увеличивает свою скорость.
Чем больше сопротивление якорной цепи двигателя, тем выше его угловая скорость в генераторном режиме работы параллельно с сетью при том же тормозном моменте.
Этот способ торможения возможен при некоторых способах регулирования скорости, когда двигатель переходя к низким скоростям, проходит значение ω>ω0. (регулирование напряжением и регулированием потока).
Режим рекуперативного торможения возможен только в реверсивном управляемом преобразователе при соблюдении трёх условий:
1. В цепи выпрямленного тока должен быть источник э.д.с, величина которой превосходит среднее значение выпрямленной противо э.д.с. инвертора; в схемах тиристорного привода постоянного тока - э.д.с. якоря двигателя должна быть больше Ed инвертора Ея >Еd.
2. Источник э.д.с. (якорь двигателя) должен быть так подключен к преобразователю, чтобы было возможно протекание тока под действием э.д.с. якоря.
3. Угол управления тиристорами должен быть больше π/2 (α > π/2)
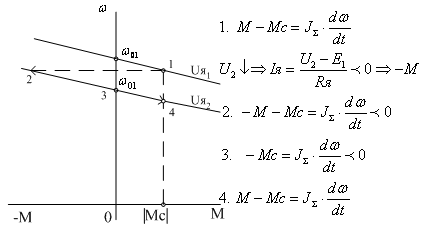
Рисунок 3.30 - Механические характеристики при рекуперативном торможении в системе ИТ-Д
При соблюдении этих условий двигатель постоянного тока будет работать в генераторном режиме, вырабатывая энергию постоянного тока, которая преобразуется тиристорным преобразователем в энергию переменного тока и отдается в питающую сеть. Например, переход на меньшую скорость. Если оператор уменьшает скорость, уменьшается напряжение на якоре с U1 до U2. Скорость двигателя из-за механической инерционности мгновенно
измениться не может, и двигатель переходит на работу в точку 2. При этом на валу двигателя возникает тормозной момент. Скорость двигателя быстро снижается до скорости ω02 точка 3 и далее под действием статического момента до скорости в точке 4, где М=Мс.
В схемах с ШИП и нерегулируемым источником постоянного тока режим торможения с отдачей энергии в сеть невозможен.
Основными достоинствами рекуперативного торможения являются: энергетическая эффективность, связанная с полезным использованием энергии торможения; высокая жесткость механических характеристик; плавный переход из двигательного в тормозной режим на одной и той же характеристике.
Баланс мощности для рекуперетивного торможения
![]() -возвращается
в сеть.
-возвращается
в сеть.