

- •Перечень сокращений
- •Предисловие
- •Введение
- •Часть 1. Архитектура и аппаратные средства микроконтроллера LPC214x
- •1.1 Общие сведения о микроконтроллерах LPC214x
- •1.2 Программистская модель процессорного ядра ARM7TDMI
- •1.2.1 Режимы работы ядра ARM7
- •1.2.2 Система регистров
- •1.2.3 Слово состояния программы
- •1.2.4 Организация памяти
- •1.3 Система команд
- •1.3.1 Команды арифметической и логической обработки
- •1.3.2 Команды умножения
- •1.3.3 Команды регистровой пересылки
- •1.3.4 Команды загрузки и сохранения регистров
- •1.3.5 Команды пакетного обмена с памятью
- •1.3.6 Команды передачи управления
- •1.3.7 Команды обращения к слову состояния программы
- •1.4 Методы адресации
- •1.4.1 Непосредственная адресация
- •1.4.2 Регистровая адресация
- •1.4.3 Косвенная адресация
- •1.4.4 Индексная адресация
- •1.5 Процедура начальной загрузки и режимы отображения памяти
- •1.6 Обработка исключительных ситуаций
- •1.7 Система тактирования
- •1.7.1 Выбор тактовой частоты микроконтроллера
- •1.7.2 Настройка тактирования периферийных устройств
- •1.8 Модуль ускорения памяти
- •1.9 Внешние выводы микроконтроллера
- •1.9.1 Служебные контакты
- •1.9.2 Программно-управляемые линии ввода-вывода
- •1.9.3 Альтернативные функции линий ввода вывода
- •1.10 Цифровые порты ввода-вывода
- •1.10.1 Управление портом через низкоскоростную шину
- •1.10.2 Управление портом через высокоскоростную шину
- •1.11 Система прерываний
- •1.11.1 Назначение системы прерываний
- •1.11.2 Процесс обработки прерываний IRQ
- •1.11.3 Процесс обработки быстрых прерываний FIQ
- •1.11.4 Регистры управления системой прерываний
- •1.11.5 Порядок настройки прерывания IRQ
- •1.11.6 Порядок настройки быстрого прерывания FIQ
- •1.11.7 Процедура обработки прерывания
- •1.11.8 Задержка обработки прерывания
- •1.12 Внешние прерывания
- •1.12.1 Регистры управления блоком внешних прерываний
- •1.12.2 Порядок настройки блока внешних прерываний
- •1.13 Таймеры-счетчики
- •1.13.1 Режим таймера и схема совпадения
- •1.13.2 Режим счетчика
- •1.13.3 Схема захвата
- •1.13.4 Управляющие регистры
- •1.13.5 Формирование интервалов времени через систему прерываний
- •1.13.6 Измерение периода и длительности импульса с помощью устройства захвата
- •1.13.7 Подсчет числа импульсов в единицу времени
- •1.14 Широтно-импульсный модулятор
- •1.14.1 Основы функционирования
- •1.14.2 Дополнительные возможности
- •1.14.3 Регистры управления ШИМ
- •1.14.4 Порядок настройки ШИМ
- •1.15 Аналого-цифровые преобразователи
- •1.15.1 Краткие сведения о встроенных АЦП
- •1.15.2 Общие рекомендации по использованию АЦП
- •1.15.3 Управляющие регистры
- •1.15.4 Порядок настройки АЦП
- •1.15.5 Программный запуск аналого-цифрового преобразователя
- •1.15.6 Запуск аналого-цифрового преобразователя по таймеру
- •1.15.7 Программный опрос готовности АЦП
- •1.15.8 Опрос готовности АЦП по прерыванию
- •1.15.9 Считывание и масштабирование результата АЦП
- •1.16 Цифро-аналоговый преобразователь
- •1.16.1 Регистр управления ЦАП
- •1.16.2 Рекомендации по применению ЦАП
- •1.17 Последовательный синхронный приемо-передатчик SPI
- •1.17.1 Назначение и основы функционирования интерфейса SPI
- •1.17.2 Управляющие регистры
- •1.17.3 Передача и прием данных в режиме ведущего
- •1.17.4 Передача и прием данных в режиме ведомого
- •1.18 Последовательный синхронный приемо-передатчик I2С
- •1.18.1 Назначение и основы функционирования интерфейса I2С
- •1.18.2 Управляющие регистры
- •1.18.3 Настройка модуля I2C
- •1.18.4 Типовые циклы обмена данными по шине I2C
- •1.19 Последовательный асинхронный приемопередатчик UART
- •1.19.1 Назначение и основы функционирования порта UART
- •1.19.2 Управляющие регистры
- •1.19.3 Настройка порта UART
- •1.19.4 Прием байта с опросом флага
- •1.19.5 Передача байта с опросом флага
- •1.19.6 Прием и передача данных с использованием прерываний
- •1.19.7 Прием и передача пакетов данных
- •1.19.8 Диагностика ошибок
- •1.19.9 Автоматическая настройка скорости
- •1.20 Часы реального времени
- •1.20.1 Основные возможности часов реального времени
- •1.20.2 Управляющие регистры
- •1.20.3 Рекомендации по применению
- •1.21 Управление питанием и идентификация источников сброса
- •1.21.1 Краткие сведения о мониторе питания
- •1.21.2 Управляющие регистры
- •Часть 2. Разработка и отладка программ с помощью современных инструментальных средств
- •2.1 Форматы представления чисел
- •2.1.1 Основные коды представления целых чисел
- •2.1.2 Форматы представление целых чисел, приятные в языке Си
- •2.1.3 Форматы чисел c плавающей точкой стандарта IEEE754
- •2.2 Основы программирования на языке Си
- •2.2.1 Структура программы
- •2.2.2 Числовые константы
- •2.2.3 Переменные и именованные константы
- •2.2.4 Оператор присваивания, выражения и операции
- •2.2.5 Условный оператор
- •2.2.6 Приведение и преобразование типов
- •2.2.7 Массивы
- •2.2.8 Строки символов
- •2.2.9 Структуры
- •2.2.10 Объединения
- •2.2.11 Указатели
- •2.2.12 Ветвление
- •2.2.13 Множественное ветвление
- •2.2.14 Цикл со счетчиком
- •2.2.15 Циклы с предусловием и постусловием
- •2.2.16 Функции
- •2.2.17 Некоторые директивы компилятора
- •2.2.18 Библиотека математических функций MATH.h
- •2.2.19 Функция создания форматированных строк SNPRINTF
- •2.2.20 Ассемблер в Си-программах
- •2.3 Интегрированная среда разработки Keil µVision 4
- •2.3.1 Создание проекта
- •2.3.2 Создание файла программы
- •2.3.3 Настройка проекта
- •2.3.4 Набор текста программы
- •2.3.5 Компиляция программы
- •2.3.6 Отладка программы
- •2.3.7 Основные отладочные инструменты среды Keil µVision 4
- •2.3.8 Управление распределением памяти
- •2.4 Методика отладки программ
- •2.4.1 Быстрый поиск ошибок
- •2.4.2 Ввод и вывод дискретных сигналов
- •2.4.3 Таймер-счетчик. Формирование интервалов времени
- •2.4.4 Таймер-счетчик. Формирование внешних сигналов совпадения
- •2.4.5 Таймер-счетчик. Счетчик внешних событий
- •2.4.6 Таймер-счетчик. Устройство захвата
- •2.4.7 Широтно-импульсный модулятор
- •2.4.8 Аналого-цифровой преобразователь
- •2.4.9 Цифро-аналоговый преобразователь
- •2.4.10 Приемопередатчик SPI
- •2.4.11 Приемопередатчик I2C
- •2.4.12 Приемопередатчик UART
- •2.4.13 Часы реального времени
- •2.5 О программировании ARM7 на ассемблере
- •2.5.1 Основные правила записи программ на ассемблере
- •2.5.2 Псевдокоманды
- •2.5.3 Директивы ассемблера
- •2.5.4 Макросы
- •2.5.5 Пример простой программы
- •2.6 Распространенные средства разработки и отладки
- •2.6.1 Демонстрационные платы EA-EDU-001 и EA-EDU-011
- •2.6.2 Внутрисхемный отладчик J-Link
- •2.6.3 Утилиты программирования ПЗУ LPC Flash Utility и FlashMagic
- •2.6.4 Программа-терминал 232Analyzer
- •2.6.5 Низкоуровневый редактор диска DMDE
- •Часть 3. Решение типовых задач локального управления
- •3.1 Формирование временной задержки с помощью цикла
- •3.1.1 Задание
- •3.1.2 Общие рекомендации
- •3.1.3 Алгоритм программы
- •3.1.4 Отладка
- •3.1.5 Дополнительные сведения о формировании временной задержки
- •3.2 Формирование дискретного сигнала с помощью таймера
- •3.2.1 Задание
- •3.2.2 Общие рекомендации
- •3.2.3 Алгоритм программы
- •3.3 Опрос дискретного датчика или кнопки
- •3.3.1 Задание
- •3.3.2 Общие рекомендации
- •3.3.3 Алгоритм программы
- •3.3.4 Отладка
- •3.4 Опрос состояния механических контактов с подавлением дребезга
- •3.4.1 Задание
- •3.4.2 Общие рекомендации
- •3.4.3 Алгоритм программы
- •3.4.4 Отладка
- •3.5 Опрос клавиатуры с автоповтором
- •3.5.1 Задание
- •3.5.2 Общие рекомендации
- •3.5.3 Алгоритм программы
- •3.5.4 Отладка
- •3.6 Формирование импульсного управляющего сигнала с помощью модуля ШИМ
- •3.6.1 Задание
- •3.6.2 Общие сведения
- •3.6.3 Алгоритм программы
- •3.6.4 Отладка
- •3.6.5 Синхронизация внешним сигналом
- •3.7 Формирование сигналов специальной формы с помощью ЦАП
- •3.7.1 Задание
- •3.7.2 Основы
- •3.7.3 Алгоритм программы
- •3.7.4 Повышение точности генерирования частоты
- •3.7.5 Выбор числа дискрет
- •3.8 Управление двухфазным шаговым двигателем
- •3.8.1 Задание
- •3.8.2 Общие сведения
- •3.8.3 Алгоритм программы
- •3.9 Применение ШИМ для формирования низкочастотных аналоговых сигналов
- •3.9.1 Задание
- •3.9.2 Основные сведения
- •3.9.3 Алгоритм основной программы
- •3.9.4 Алгоритм процедуры обработки прерывания
- •3.10 Управление символьным жидкокристаллическим индикатором
- •3.10.1 Задание
- •3.10.2 Управление модулем жидкокристаллической индикации
- •3.10.3 Разработка функции управления ЖКИ с ожиданием готовности
- •3.10.4 Функция вывода строки символов
- •3.10.5 Разработка функции инициализации модуля ЖКИ
- •3.10.6 Разработка тестовой программы
- •3.10.7 Управление ЖКИ с опросом флага готовности
- •3.10.8 Программирование произвольных символов
- •3.11 Управление матричным светодиодным индикатором
- •3.11.1 Задание
- •3.11.2 Основные рекомендации
- •3.11.3 Алгоритм основной программы
- •3.11.4 Алгоритм процедуры обработки прерывания
- •3.11.5 Реализация движения строки
- •3.12 Управление матричным жидкокристаллическим дисплеем
- •3.12.1 Управление дисплеем на основе контроллера PCF8833
- •3.12.2 Построение простейших геометрических фигур
- •3.13 Измерение постоянного напряжения
- •3.13.1 Задание
- •3.13.2 Основные рекомендации
- •3.13.3 Алгоритм основной программы
- •3.13.4 Алгоритм процедуры обработки прерывания от АЦП
- •3.13.5 АЦП с циклическим опросом нескольких каналов
- •3.13.6 Автоматический выбор пределов измерения
- •3.14 Измерение параметров уровня переменного напряжения
- •3.14.1 Задание
- •3.14.2 Основные рекомендации
- •3.14.3 Алгоритм основной программы
- •3.14.4 Алгоритм процедуры обработки прерывания
- •3.15 Измерение ускорения с помощью трехосевого акселерометра
- •3.16 Измерение интервалов времени с помощью таймера
- •3.16.1 Задание
- •3.16.2 Общие рекомендации
- •3.16.3 Алгоритм основной программы
- •3.16.4 Алгоритм процедуры обработки прерывания
- •3.16.5 Повышение разрешающей способности путем усреднения
- •3.16.6 Введение поправок
- •3.17 Измерение частоты с помощью счетчика
- •3.17.1 Задание
- •3.17.2 Основные рекомендации
- •3.17.3 Алгоритм программы
- •3.17.4 Повышение точности измерений
- •3.18 Опрос цифрового датчика температуры. Интерфейс I2C
- •3.18.1 Задание
- •3.18.2 Общие рекомендации
- •3.18.3 Алгоритм программы
- •3.20 Обмен данными с электрически перепрограммируемым ПЗУ
- •3.20.1 Задание
- •3.20.2 Общие сведения о микросхемах EEPROM
- •3.20.3 Адресация в микросхемах EEPROM
- •3.20.4 Порядок чтения EEPROM
- •3.20.5 Порядок записи EEPROM
- •3.20.6 Разработка программы чтения EEPROM
- •3.20.7 Разработка функции записи блока данных в EEPROM
- •3.21 Интерфейс RS-232. Прием и передача простых команд
- •3.21.1 Задание
- •3.21.2 Алгоритм программы
- •3.21.3 Автоматическая настройка скорости
- •3.22.1 Задание
- •3.22.2 Основные рекомендации
- •3.22.3 Алгоритм программы
- •3.23 Интерфейс RS-232. Прием пакета переменной длины
- •3.23.1 Задание
- •3.23.2 Основы реализации
- •3.23.3 Алгоритм программы
- •3.24 Обмен данными с картой памяти Secure Digital
- •3.24.1 Задание
- •3.24.2 Общие сведения о карах FLASH-памяти SD/MMC
- •3.24.3 Команды SD/MMC
- •3.24.4 Процедура инициализации карты
- •3.24.5 Чтение и запись данных
- •3.24.6 Обработка ошибок
- •3.24.7 Комментарии к алгоритму и программе
- •Алфавитный указатель управляющих регистров
- •Список литературы
- •Содержание
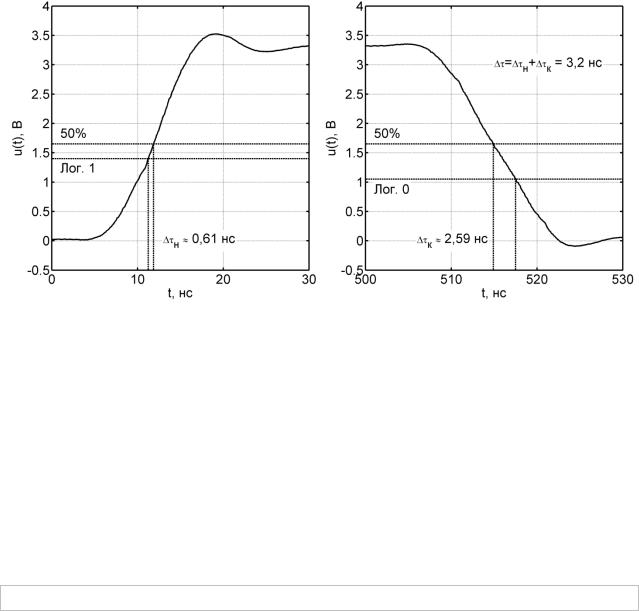
Измерение интервала времени связано еще c одной составляющей погрешности. Микроконтроллер реагирует на логические уровни, не соответствующие серединам фронтов импульсов (раздел 1.9.2). Это неизбежно приведет к систематическому завышению измеряемого интервала времени, если он ограничен разными (нарастающим и спадающим) фронтами. Погрешность тем больше, чем меньше скорость изменения сигнала. При сравнительно высокой скорости изменения (порядка нескольких сотен В/мкс) этот эффект дает аддитивную абсолютную погрешность примерно  нс.
нс.
Рисунок 3.16.2 – Осциллограмма фронтов импульса длительностью 500 нс
собозначенными точками пересечения логических уровней и 50% амплитуды
Вкачестве иллюстрации приведем подробную осциллограмму фронтов импульса, полученную цифровым осциллографом в стробоскопическом режиме c эффективной частотой квантования 20 ГГц (рисунок 3.16.2). Длительность импульса, определяемая как интервал времени между началом нарастания и началом спада, составляет 500 нс. В то же время длительность импульса по уровню 50% амплитуды равна 503 нс, а интервал между моментами пересечения уровней логической единицы и нуля равен примерно 506 нс. Разность составляет 3,2 нс.
Указанные составляющие погрешности могут в большой степени устраняться введением поправочного множителя и вычитания аддитивного смещения, например для длительности в миллисекундах
snprintf(S,17,"T=%11.5f ms",T/60E3*0.9999-4E-6);
3.17 Измерение частоты с помощью счетчика
3.17.1 Задание
Разработать программу измерения частоты прямоугольных импульсов, поступающих на вход CAP1.3 микроконтроллера.
217

3.17.2 Основные рекомендации
Схема, отражающая принцип способ измерения частоты с помощью двух таймеров-счетчиков, показана на рисунке 3.17.1. Для формирования интервала счета 1 с используется таймер T0TC и устройство сравнения 2. Соответственно, интервал счета задается пороговым регистром T0MR2. Начало и конец интервала обозначаются перепадами логического уровня (инверсией) на выходе MAT0.2.
|
|
CAP1.3 |
|
|
|
|
u |
x |
T1TC |
T1CR2 |
|
f |
|
|
|
|
|
x |
|
|
|
|
CAP1.2 |
|
|
|
|
|
|
fPCLK = 60 МГц |
T0TC |
A |
|
|
|
|
|
|
== |
0,5 Гц |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
0,5 Гц |
|
|
|
|
Y |
|
|
|
|
T0MR2 |
B |
|
|
|
|
|
|
|
|
|
|
|
MAT0.2 |
|
|
|
|
Рисунок 3.17.1 – Схема измерения частоты с помощью двух таймеров-счетчиков
Тот же сигнал (осциллограмма на рисунке 3.17.2) через внешнее электрическое соединение поступает на стробирующий вход CAP1.2 устройства захвата T1CR2.
На счетный вход CAP1.3 счетчика T1TC поступают импульсы  , частоту которых требуется измерить (на рисунке 3.17.2 внизу). Частота
, частоту которых требуется измерить (на рисунке 3.17.2 внизу). Частота  определяется как разность текущего и предыдущего захваченного состояния таймера.
определяется как разность текущего и предыдущего захваченного состояния таймера.
Вычисление частоты предлагается выполнять в процедуре обработки прерывания. Прерывание вырабатывается по каждому фронту (нарастающему и спадающему) стробирующего сигнала CAP1.2.
3.17.3 Алгоритм программы
Также как в предыдущей программе, установить тактовую частоту периферийных устройств  МГц. Для этого (см. раздел 1.7.1 и рисунок 1.7.1) открыть файл инициализации Startup.s, перейти на вкладку Configuration Wizard; установить флажок VPBDIV Setup и выбрать опцию VPB Clock = CPU Clock.
МГц. Для этого (см. раздел 1.7.1 и рисунок 1.7.1) открыть файл инициализации Startup.s, перейти на вкладку Configuration Wizard; установить флажок VPBDIV Setup и выбрать опцию VPB Clock = CPU Clock.
Директивой #include подключить файлы stdio.h и LCD.c
В программе потребуется объявить следующие глобальные переменные: а) целочисленные OldCAP и NewCAP для хранения текущего и
предыдущего захваченного состояния счетчика;
б) вещественная переменная f, хранящая частоты в герцах;
в) флаг Refresh, равенство единице которого сигнализирует о получении нового результата измерений и необходимости обновления индикатора;
г) строковая переменная S длиной 16 символов для индикации (может быть глобальной или локальной переменной основной программы).
218

Рисунок 3.17.2 – Осциллограммы сигналов при измерении частоты (время счета 1 с; частота сигнала 5 Гц)
Схема процедуры обработки прерываний показана на рисунке 3.17.3.
1.Процедура начинается со считывания последнего захваченного состояния таймера из T1CR2 в переменную NewCAP.
2.Значение частоты в килогерцах вычисляется по очевидной формуле
f=(NewCAP-OldCAP)/1000.0;
3.Заменить предыдущее состояние таймера текущим.
4.Установить в единицу флаг готовности результата Refresh.
Процедура обработки прерывания от таймера
Начало
1
NewCAP = T1CR2
2
f = (NewCAP – OldCAP) / 1000.0
3
OldCAP = NewCAP
4
Refresh = 1
5
Инициализация системы прерываний
Возврат
Основная программа
Начало
1
Выбор режима линий
P0.16, P0.17, P0.18
2
Инициализация
ЖКИ
3
Настройка таймера 0, схемы совпадения, включение таймера 0
4
Настр. таймера 1, схем захвата и совпадения, включение таймера 1
5Настройка системы прерываний
6 |
Нет |
Refresh = 1? |
|
|
Да
7
Refresh = 0
8
Формирование
строки для f
9
Вывод строки
Рисунок 3.17.3 – Схема программы частотомера
219