


2.6 Распространенные средства разработки и отладки
2.6.1 Демонстрационные платы EA-EDU-001 и EA-EDU-011
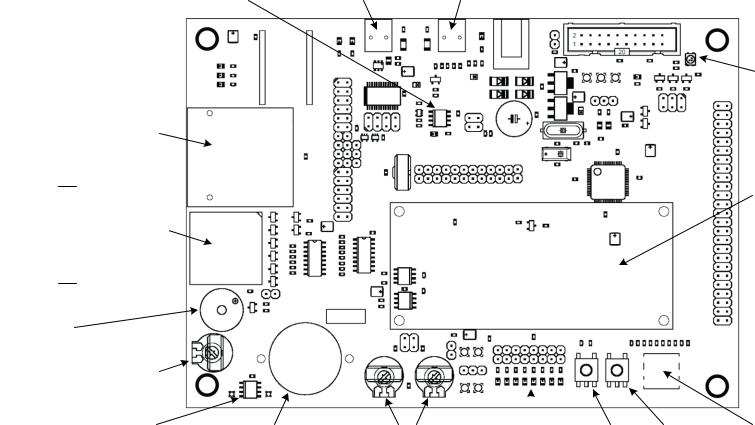
Одной из наиболее удачных демонстрационных плат на основе микроконтроллеров семейства LPC2000, по мнению авторов, является плата EA- EDU-001 производства фирмы Embedded Artists. На рисунке 2.6.1 приведена фотография платы, а на рисунке 2.6.2 схематично изображено размещение основных электронных узлов с указанием линий микроконтроллера, управляющих ими.
Плата EA-EDU-001 сочетает разнообразие установленных устройств и возможность расширения благодаря 50-контактому разъему, к которому подключено большинство портовых линий микроконтроллера.
Причислим устройства, установленные на плате:
1)микроконтроллер LPC2148 с кварцевыми резонаторами 12 МГц и
32768 Гц;
2)восемь светодиодов, подключенных к порту ввода-вывода;
3)трехцветный светодиод, подключенный к трем каналам ШИМ;
4)кнопка, подключенная к входу запроса внешнего прерывания;
5)джойстик, состоящий из пяти кнопок;
6)два потенциометра, подключенных к входам АЦП;
7)динамик, подключенный к выходу ЦАП;
8)фильтр нижних частот, для получения постоянного напряжения с помощью ШИМ;
9)символьный ЖК индикатор 16×2 символа (LMB162A);
10)светодиодная матрица 8×8 точек (LMD08088);
11)миниатюрный шаговый двигатель (20BY20L033);
Рисунок 2.6.1 – Фотография учебной платы EA-EDU-001
153
|
|
USB |
|
Память EEPROM |
UART0 |
D–/D+ – прием/передача |
|
SDA0 – данные |
TxD0 – передача |
P0.23 |
– Vbus |
SCL0 – тактирование |
RxD0 – прием |
P0.31 |
– Connect |
Flash-карта MMС/SD
MOSI0 – передача
MISO0 – прием
SCK0 – тактирование
P0.11 – CS
Светодиодная матрица
MOSI0 – передача
MISO0 – прием
SCK0 – тактирование
P0.15 – CS
Динамик
AOUT
Трехцветный светодиод
P0.7/PWM2 – красный P0.8/PWM4 – синий P0.9/PWM6 – зеленый
Жидкокристаллический
индикатор
P1.16–P1.23 – D0–D7 (данные) P1.24 – RS (команда/данные) P0.22 – RW (чтение/запись) P1.25 – E (стробирование) P0.30 – подсветка
Регулятор громкости |
|
|
|
|
|
|
|
|
|
Джойстик |
|
|
|
|
|
|
|
|
|
|
|
P0.16 |
– центр |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
P0.17 |
– вверх |
Датчик температуры |
|
|
|
|
|
|
|
|
|
|
|
Шаговый двигатель |
Потенциометры |
Светодиоды |
|
Кнопка |
|
Сброс |
P0.18 |
– вправо |
|||
SDA0 – данные |
P0.12, P0.21 |
AD0.1, AD0.2 |
|
P0.8 – P0.15 |
|
P0.14 |
|
|
P0.19 |
– влево |
|
|
|||||||||||
SCL0 – тактирование |
|
(слева направо) |
|
(справа налево) |
|
|
|
|
P0.20 |
– вниз |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
154
Рисунок 2.6.2 – Схема размещения компонентов учебной платы EA-EDU-001 с указанием адресов каналов управления
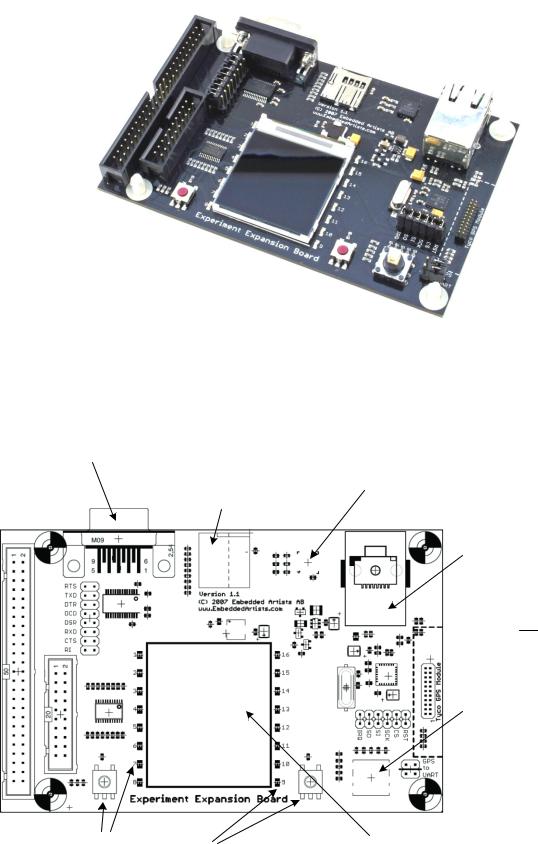
Рисунок 2.6.3 – Фотография платы расширения EA-EDU-011
RS-232 |
Flash-карта microSD |
Акселерометр |
|
TxD1, RxD1 |
MOSI0 – передача |
AD1.6 – канал X |
|
RTS, CTS |
MISO0 – прием |
AD1.7 – канал Y |
|
DSR, DTR |
SCK0 – тактирование |
AD0.3 – канал Z |
|
DCD, RI |
P0.13 |
– CS |
P0.13 – gSelect1 |
|
P0.16 |
– Card Detect |
P0.14 – gSelect2 |
Ethernet
P0.14 – INT
MOSI0 – передача
MISO0 – прием
SCK0 – тактирование
P0.14 – CS
Джойстик
P0.8 – центр
P0.10 – вверх
P0.11 – вправо
P0.9 – влево
P0.12 – вниз
Параллельный порт |
Цветной ЖК дисплей |
SDA0 – данные |
MOSI0 – передача |
SCL0 – тактирование |
SCK0 – тактирование |
(LED0–15 светодиоды; LED7, 8 – кнопки) |
P0.7 – CS |
|
P0.15 – подсветка |
155

Рисунок 2.6.4 – Схема размещения компонентов учебной платы EA-EDU-011
суказанием адресов каналов управления
12)электрически перепрограммируемое ПЗУ емкостью 2 кбита
(CAT1025);
13)цифровой датчик температуры (LM75);
14)разъем карт памяти MMS/SC;
15)мост USB/UART (FT232R);
16)интерфейс USB;
17)интерфейс JTAG.
Питание платы осуществляется либо от порта USB персонального компьютера, либо от отдельного источника постоянного тока 9–15 В (не менее 200 мА).
50-штырьковый разъем может использоваться для расширения платы с использованием любой аппаратуры, разработанной и сконструированной пользователем. Фирма Embedded Artists выпускает плату расширения EA- EDU-011, содержащая дополнительный набор устройств:
1)джойстик;
2)две кнопки и 16 светодиодов, подключенный через параллельный порт (PCA9532);
3)цветной светодиодный экран 130×130 точек совместимый с
Nokia 6100 и контролером Philips PCF8833.
4)аналоговый трехосевой акселерометр (MMA7260QT);
5)разъем microSD;
6)интерфейс RS-232 с полным набором модемных сигналов;
7)интерфейс Ethernet 10 Мбит через мост SPI/Ethernet (ENC28J60).
Фотография платы показана на рисунке 2.6.3, на рисунке 2.6.4 приве-
дена схема размещения компонентов с указанием адресов подключения к микроконтроллерной плате EA-EDU-001.
2.6.2 Внутрисхемный отладчик J-Link
При составлении и настоящего учебного пособия авторы использовали внутрисхемный отладчик J-Link фирмы Segger. Фотография прибора и его расширенной модификации J-Link Ultra, показаны на рисунках 2.6.5, 2.6.6.
Рисунок 2.6.5 – Отладчик J-Link |
Рисунок 2.6.6 – Отладчик J-Link Ulta |
156