

УСО и МК 2010
.pdf
|
Владимирский государственный университет |
|
|
УСТРОЙСТВА СОПРЯЖЕНИЯ С ОБЪЕКТОМ |
|
|
И МИКРОКОНТРОЛЛЕРЫ |
|
|
Конспект лекций |
|
|
Оглавление |
|
СПИСОК ИСПОЛЬЗУЕМЫХ СОКРАЩЕНИЙ..................................................................................... |
3 |
|
1 МЕСТО УСО И ЛВС В СИСТЕМАХ УПРАВЛЕНИЯ....................................................................... |
4 |
|
2 Зачем нужно проектировать УСО......................................................................................................... |
4 |
|
3 ЗАДАЧИ, РЕШАЕМЫЕ УСО В СИСТЕМЕ УПРАВЛЕНИЯ............................................................ |
5 |
|
4 КЛАССИФИКАЦИЯ УСО..................................................................................................................... |
5 |
|
5 ВВОД ДИСКРЕТНОЙ ИНФОРМАЦИИ.............................................................................................. |
5 |
|
5.1 |
УСТРОЙСТВО ВВОДА ДИСКРЕТНЫХ СИГНАЛОВ, ОПРАШИВАЕМОЕ |
|
ПРОЦЕССОРОМ .................................................................................................................................... |
5 |
|
5.2 |
УСТРОЙСТВО ВВОДА ДИСКРЕТНЫХ СИГНАЛОВ, ИНИЦИИРУЮЩЕЕ ПРЕРЫВАНИЕ |
|
................................................................................................................................................................... |
|
6 |
5.3 |
СТРУКТУРА УСТРОЙСТВ ВВОДА ЧИСЛО-ИМПУЛЬСНОЙ ИНФОРМАЦИИ................... |
7 |
5.4 |
СТРУКТУРА БИС ПРОГРАММИРУЕМОГО ТАЙМЕРА 580ВИ53 .......................................... |
7 |
6 УСТРОЙСТВА ВЫВОДА ДИСКРЕТНОЙ И ЧИСЛОИМПУЛЬСНОЙ ИНФОРМАЦИИ............. |
7 |
|
6.1 |
СТРУКТУРА УСТРОЙСТВА ВЫВОДА ДИСКРЕТНОЙ ИНФОРМАЦИИ БЕЗ |
|
ВОЗМОЖНОСТИ ЧТЕНИЯ ВЫХОДНОГО РЕГИСТРА................................................................... |
7 |
|
6.2 |
СТРУКТУРА С ВОЗМОЖНОСТЬЮ ЧТЕНИЯ ВЫХОДНОГО РЕГИСТРА............................. |
8 |
6.3 |
СТРУКТУРА УСТРОЙСТВ ВЫВОДА ЧИСЛОИМПУЛЬСНЫХ СИГНАЛОВ И ШИРОТНО- |
|
ИМПУЛЬСНЫЙ МОДУЛЯТОР............................................................................................................ |
8 |
|
6.4 |
ВВОД АНАЛОГОВЫХ СИГНАЛОВ ............................................................................................. |
9 |
6.5 |
СТУКТУРА УСТРОЙСТВА ВВОДА АНАЛОГОВЫХ СИГНАЛОВ (УВАС) С |
|
ПАРАЛЛЕЛЬНЫМИ ЦИФРОВЫМИ ВЫХОДАМИ (а) .................................................................... |
9 |
|
6.6 |
СТРУКТУРА УВАС С ПАРАЛЛЕЛЬНЫМИ АНАЛОГОВЫМИ ВЫХОДАМИ (б) ................ |
9 |
6.7 |
СТРУКТУРА УВАС С ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНЫМИ АНАЛОГОВЫМИ |
|
ВЫХОДАМИ (в) ................................................................................................................................... |
10 |
|
6.8 |
СТРУКТУРА УВАС С ПОСЛЕДОВАТЕЛЬНЫМИ АНАЛОГОВЫМИ ВЫХОДАМИ (г) .... |
10 |
7 УСТРОЙСТВА ВЫВОДА АНАЛОГОВЫХ СИГНАЛОВ ............................................................... |
11 |
|
7.1 |
СТРУКТУРА С ЦИФРО-АНАЛОГОВЫМИ ПРЕОБРАЗОВАТЕЛЯМИ ВО ВСЕХ |
|
КАНАЛАХ............................................................................................................................................. |
11 |
|
7.2 |
СТРУКТУРА С ДИНАМИЧЕСКИМ ИСПОЛЬЗОВАНИЕМ ОДНОГО ЦИФРО- |
|
АНАЛОГОВОГО ПРЕОБРАЗОВАТЕЛЯ........................................................................................... |
11 |
|
8 ДИСКРЕТНЫЕ ЭЛЕМЕНТЫ УСО..................................................................................................... |
12 |
|
8.1 |
КОМБИНАЦИОННЫЕ ФУНКЦИОНАЛЬНЫЕ УЗЛЫ ............................................................. |
12 |
8.2 |
ЦИФРОВЫЕ АВТОМАТЫ............................................................................................................ |
13 |
8.3 |
ПРОГРАММИРУЕМЫЕ ЛОГИЧЕСКИЕ ИНТЕГРАЛЬНЫЕ СХЕМЫ (ПЛИС) ..................... |
14 |
9 АНАЛОГОВЫЕ ЭЛЕМЕНТЫ УСО.................................................................................................... |
15 |
|
9.1 |
ДИФФЕРЕНЦИАЛЬНЫЙ ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ.................................................. |
15 |
9.2 |
ТИПОВЫЕ СХЕМЫ ВКЛЮЧЕНИЯ ............................................................................................ |
15 |
9.3 |
ИЗМЕРИТЕЛЬНЫЙ (ИНСТРУМЕНТАЛЬНЫЙ) УСИЛИТЕЛЬ .............................................. |
16 |
9.4 |
МЕТОДЫ СТРУКТУРНОГО УЛУЧШЕНИЯ ХАРАКТЕРИСТИК ДИФФЕРЕНЦИАЛЬНОГО |
|
УСИЛИТЕЛЯ ........................................................................................................................................ |
16 |
|
9.5 |
Параметрическая компенсация смещения нуля и его дрейфа.................................................... |
16 |
9.6 |
ПРИМЕНЕНИЕ УСИЛИТЕЛЕЙ С МОДУЛЯЦИЕЙ-ДЕМОДУЛЯЦИЕЙ (мдм) СИГНАЛА 16 |
|
9.7 |
АВТОМАТИЧЕСКАЯ КОРРЕКЦИЯ НУЛЯ ............................................................................... |
17 |
9.8 |
КОМПАРАТОРЫ............................................................................................................................ |
17 |
9.9 |
АНАЛОГОВЫЕ КЛЮЧИ............................................................................................................... |
18 |
9.10 Ключи на электромагнитных реле .............................................................................................. |
18 |
|
9.11 Полупроводниковые ключи......................................................................................................... |
18 |
|
|
|
2 |
|
|
9.12 |
ПАРАМЕТРЫ АНАЛОГОВЫХ КЛЮЧЕЙ................................................................................ |
19 |
|
9.13 |
АНАЛОГОВЫЙ МУЛЬТИПЛЕКСОР........................................................................................ |
19 |
|
9.14 |
ОСНОВНЫЕ ПАРАМЕТРЫ АНАЛОГОВЫХ МУЛЬТИПЛЕКСОРОВ ................................ |
19 |
|
9.15 |
УСТРОЙСТВО ВЫБОРКИ / ХРАНЕНИЯ (УВХ) ..................................................................... |
20 |
|
9.16 |
ИЗМЕРИТЕЛЬНЫЕ УСИЛИТЕЛИ С ГАЛЬВАНИЧЕСКОЙ РАЗВЯЗКОЙ.......................... |
21 |
|
9.17 |
ИЗОЛИРУЮЩИЕ УСИЛИТЕЛИ ............................................................................................... |
21 |
10 |
АНАЛОГО-ЦИФОРОВЫЕ ЭЛЕМЕНТЫ УСО ............................................................................... |
22 |
|
11 |
ЦИФРО-АНАЛОГОВЫЙ ПРЕОБРАЗОВАТЕЛЬ............................................................................ |
22 |
|
|
11.1 |
СИГМА-ДЕЛЬТА ЦАП (ΣΔ ЦАП).............................................................................................. |
22 |
|
11.2 |
ЦАП С ДЕКОДИРУЮЩЕЙ СЕТКОЙ R-2R ДЛЯ СУММИРОВАНИЯ ТОКОВ .................. |
23 |
|
11.3 |
ЦАП С РЕЗИСТОРНОЙ СЕТКОЙ С ДВОИЧНО-ВЗВЕШЕННЫМИ |
|
|
СОПРОТИВЛЕНИЯМИ ДЛЯ СУММИРОВАНИЯ ТОКОВ............................................................ |
24 |
|
12 |
АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ (АЦП) ............................................................... |
25 |
|
|
12.1 |
АЦП ПРЯМОГО ПРЕОБРАЗОВАНИЯ (ПАРАЛЛЕЛЬНЫЕ АЦП). ....................................... |
25 |
|
12.2 |
АЦП УРАВНОВЕШИВАЮЩЕГО ПРЕОБРАЗОВАНИЯ. ...................................................... |
26 |
|
12.3 |
АЦП РАЗВЕРТЫВАЮЩЕГО ПРЕОБРАЗОВАНИЯ. .............................................................. |
27 |
|
12.4 |
СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ АЦП....................................................................... |
30 |
|
12.5 |
ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ АЦП. ..................................................................... |
34 |
13 |
Приборные измерительные системы и виртуальные измерительные приборы........................... |
35 |
|
14 |
Локальные вычислительные сети...................................................................................................... |
36 |
|
|
14.1 |
Интерфейсы. Термины и определения........................................................................................ |
36 |
|
14.2 |
ЛОКАЛЬНЫЕ СЕТИ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ................................ |
37 |
15 |
Особенности проектирования микроконтроллерных устройств управления объектами............ |
37 |
|
|
15.1 |
Введение в предметную область. ................................................................................................ |
37 |
|
15.2 |
Основные положения.................................................................................................................... |
38 |
|
15.3 |
Структура МК-системы управления........................................................................................... |
39 |
|
15.4 |
Особенности разработки аппаратурных средств МК-систем................................................... |
40 |
|
15.5 |
Особенности разработки прикладного программного обеспечения МК-систем ................... |
40 |
16 |
МОНИТОР НАПРЯЖЕНИЯ ПИТАНИЯ ....................................................................................... |
42 |
|
|
16.1 |
Генерация сигнала сброса при включении питания.................................................................. |
42 |
|
16.2 |
Генерация сброса при понижении питания и во время выбросов и провалов напряжения |
|
|
сети |
. ........................................................................................................................................................ |
42 |
|
16.3 |
Защита памяти от записи недостоверных данных..................................................................... |
42 |
|
16.4 |
Выдача предупреждения о возможной аварии питания. .......................................................... |
43 |
|
16.5 |
Переключение на питание от резервной батареи. ..................................................................... |
43 |
|
16.6 |
Схемы применения супервизора PST529. .................................................................................. |
43 |
17 |
СТОРОЖЕВОЙ ТАЙМЕР (WDT)..................................................................................................... |
44 |
|
18 |
Аналого-цифровые преобразователи в составе МК........................................................................ |
44 |
|
|
18.1 |
Блок схема АЦП. ........................................................................................................................... |
44 |
19 |
Широтно-импульсная модуляция (режим ШИМ) (на прмере режима ШИМ PCA в МК 8052F )46 |
||
20 |
СПИСОК ИСПОЛЬЗУЕМОЙ ЛИТЕРАТУРЫ ................................................................................ |
47 |
|
3
СПИСОК ИСПОЛЬЗУЕМЫХ СОКРАЩЕНИЙ
АЛУ – арифметическое логическое устройство; АМ – аналоговый мультиплексор;
АПИС – автоматическая приборная измерительная система;
АЦП – аналого-цифровой преобразователь; БИС – большая интегральная схема; БПФ – быстрое преобразование Фурье;
ВИП – виртуальный измерительный прибор; Г – генератор; ГК – групповой контроллер;
ГР – гальваническая развязка; ГТИ – генератор тактовых импульсов; Д – датчик; ДМ – демодулятор;
ДОЗУ – двухпортовое оперативное запоминающее устройство;
ДУ – дифференциальный усилитель; ДШ – дешифратор;
ЖКИ – жидкокристаллический индикатор; ЗП – сигнал записи; ЗПР – сигнал запроса прерывания;
ИМ – исполнительный механизм; ИОН – источник опорного напряжения; КК – компаратор кодов;
КОВНП – коэффициент ослабления влияния напряжения питания;
КОП – канал общего пользования; КОСС – коэффициент ослабления синфазного сигнала; ЛВС – локальная вычислительная сеть; М – модулятор; МЗР – младший значащий разряд;
МК – микроконтроллер; МЛ – младший; МП – микропроцессор;
ЛК – локальный контроллер; НП – нормирующий преобразователь;
ОЗУ – оперативное запоминающее устройство; ОУ – объект управления;
ПЛИС – программируемая логическая интегральная схема;
ППЭ – приемопередающий элемент. РГ – регистр;
РПП – регистр последовательного приближения; РС – рабочая станция; РСУ – распределенная система управления;
РУС – регистр управляющего слова; СА – селектор адреса;
СБИС – сверх большая интегральная схема; СВТ – средства вычислительной техники; СДИ – светодиодный индикатор; СОИ – система обработки информации; СТ – старший; СУ – система управления; Сч – счетчик; Т – триггер; ТП – термопара;
ТР – терморезистор; ТТЛ – транзисторно-транзисторная логика;
УВАС – устройство ввода аналоговых сигналов; УВВ – устройство ввода/вывода;
УВХ – устройство выборки и хранения; УПТ – усилитель переменного тока;
УПУ – усилитель с программируемым коэффициентом усиления;
УСО – устройство сопряжения с объектом; УУ – устройство управления; ФВЧ – фильтр высоких частот; ФНЧ – фильтр низких частот;
ФП – функциональный преобразователь; ЦАП – цифро-аналоговый преобразователь; ЦИП – цифровой измерительный прибор; ЧИП – частотно-импульсное преобразование; ША – шина адреса; ШД – шина данных;
ШИМ – широтно-импульсная модуляция; ШУ – шина управления;
AB (address bus) – шина адреса;
ADC (analog-to-digital converter) – аналого-цифровой пре-
образователь (АЦП);
CB (control bus) – шина управления; CS (chip select) – выбор кристалла;
DAC (digital-to-analog converter) – цифро-аналоговый преобразователь (ЦАП);
DB (data bus) – шина данных;
PCA (programmable counter array) – программируемый массив счётчиков;
PLD (programmable logic devices) – программируемые интегральные логические схемы (ПЛИС);
PWM (pulse-width modulation) – широтно-импульсная модуляция (ШИМ);
RD (read) – сигнал чтения;
RS-232 – стандартный последовательный интерфейс для медленных устройств (со скоростью передачи до
19200 бод);
WDT (watchdog timer) – сторожевой таймер; WR (write) – сигнал записи.

4
1 МЕСТО УСО И ЛВС В СИСТЕМАХ УПРАВЛЕНИЯ
В 60-х годах в связи с усложнением объектов и процессов, подлежащих автоматизации, а также в связи с потребностью автоматизировать рассредоточенные территориально объекты, в стратегии управления проявилась потребность децентрализации, то есть передачи части функций управления из центра на места. Реализовать принцип децентрализованного управления стало возможным в 70-х годах с появлением дешевых, компактных и экономичных микропроцессоров (МП).
ETHERNET |
Уровень |
(TOKENRING) |
центрального |
(ARCNET) |
управления |
PC |
PC |
|
|
КОНЦЕНТРАТОР |
|
Уровень |
|
|
|
|
группового |
|
|
RS-232 |
||
ЛВС |
управления |
|||
RS |
|
|||
|
|
|
|
|
RS RS |
|
(Modbus, |
ГК |
|
ГК |
|
|
|
|
Л |
||
|
|
rofibus) |
|
|
ВС |
ЛВС |
us, |
ЛВС |
|
|
|
P |
|
|
|||
|
|
|
|
|
|
b |
|
|
|
|
|
Bit |
|
|
|
|
|
|
|
|
i |
ЛК i |
m |
|
|
|
|
|
|
|
|
|
2 |
2 |
2 |
|
|
|
|
||
|
|
ЛК1 |
|
1 |
ЛК1 |
|
|
|
|
|
|
|
n |
ГК1 |
2 |
Уровень
локального
управления
Датчики и ИМ
. . . . . . . .
ТП (ОУ)
На рисунке приведен пример трехуровневой системы управления сложным технологическим процессом (ТП) или объектом (ОУ). Количество контролируемых параметров измеряется сотнями, управляемых параметров – десятками).
Технологический процесс управляется с помощью исполнительных механизмов (ИМ), а информация о параметрах технологического процесса снимается с помощью датчиков. Ввод информации о параметрах, вычисление и выдача управляющих воздействий осуществляется локальными (ЛК) или групповыми (ГК) контроллерами. Координация управления процессом осуществляется рабочими станциями (РС) с помощью локальных вычислительных сетей (ЛВС) или по последовательному каналу связи RS232 через концентратор. В зависимости от сложности процесса находится количество РС, но их всегда больше 1 (дублирование для повышения надежности). В свою очередь РС объединены как между собой, так и с другими компонентами цеха (предприятия) локальной сетью верхнего уровня типа ETHERNET, ARCNET или TOKENRING. Место ЛВС в изображенной системе очевидно; необходимо только подбирать тип ЛВС и ее параметры под конкретные требования: гарантированное время доставки, скорость передачи, объем пакетов, количество аппаратно реализованных функций в контроллерах сети и т.д.
Устройства сопряжения с объектом (УСО) представляют собой преобразователь управляющих кодов, выдаваемых процессором, в сигналы управления исполнительными механизмами (импульсные, дискретные, аналоговые) и преобразование сигналов с датчиков в коды для ввода в процессор. УСО располагаются внутри ЛК или ГК. В последнее время имеется тенденция интеллектуализации датчиков, то есть размещение схем преобразования непосредственно в корпусе датчиков и передачи кодов в процессор по стандартному последовательному интерфейсу (AD1B60).
2 Зачем нужно проектировать УСО
1.Когда возникает потребность оснастить УСО специализированный или новый компьютер, имеющий интерфейс, отличающийся информационно, электрически или конструктивно от тех, для которых продаются готовые УСО. Широкий ассортимент предлагаемых фирмами готовых УСО в подавляющем большинстве рассчитан на IBMсовместимые компьютеры или другие компьютеры массового применения.
2.Всегда индивидуально разрабатываются УСО с особыми техническими характеристиками (особо высокая
разрешающая способность, особо низкое энергопотребление, особо высокая помехозащищенность, индивидуальное
5
гальваническое разделение каналов и т.д.). Серийно выпускаемые УСО делают универсальными для удовлетворения массового спроса и снижения стоимости, а это порождает их избыточность и среднее качество параметров.
3. Для крупносерийного производства экономически выгоднее разработать собственное УСО, вместо того, чтобы покупать готовое. При этом новая, более совершенная элементная база должна использоваться в УСО, улучшая их параметры и уменьшая стоимость. И инженерный потенциал разработчиков должен быть задействован. Нужно помнить также о том, что серийные электронные изделия выпускаются ограниченное время (в связи с моральным старением), в среднем 6 лет.
3 ЗАДАЧИ, РЕШАЕМЫЕ УСО В СИСТЕМЕ УПРАВЛЕНИЯ
Для управления объектом (ОУ) нужно получить информацию о состоянии его параметров, выделить полезную составляющую и преобразовать в форму, пригодную для ввода в ЭВМ. Вычислительная машина преобразует эту информацию в управляющее воздействие по заданному закону. Так как управляющее воздействие ЭВМ выдаёт в виде кода, то необходимо преобразовать этот код в сигнал управления и осуществить собственно воздействие на объект. Так как расстояние между ЭВМ и ОУ может составлять от нескольких метров до нескольких километров, то особой задачей является передача информации в том и другом направлении.
На УСО могут быть возложены следующие задачи:
ДУСО
|
|
|
|
|
|
|
|
|
вв |
|
||
|
|
|
|
|
|
ЭВМ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ОУ |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
УСО |
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
выв |
||||
|
|
|
||||||||||
|
|
|
|
|
ИМ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-усиление сигнала датчика (Д), его нормализация, отстройка от помех (фильтрация), линеаризация характеристики датчика, преобразование в цифровую форму, усреднение, масштабирование, выделение диапазона работы, запоминание информации в течение заданного интервала, одноили многоуровневый допусковый контроль;
-преобразование управляющего кода в сигнал или код, пригодный для передачи к исполнительному механизму (ИМ); преобразование управляющего кода в аналоговый сигнал; реализация управляющей функции на основе управляющего кода (управление шаговым двигателем); усиление управляющего сигнала; преобразование сигнала в форму, пригодную для управления исполнительным механизмом.
Разработчику УСО необходимо решать задачу распределения функций, решаемых УСО между аппаратурной и программной их реализацией.
Разработчику системы управления (СУ) необходимо решать задачу распределения функций между датчиками, первичными преобразователями, УСО и центральным вычислителем.
В первом случае предпочтительна аппаратурная реализация функций, как в аналоговой, так и в цифровой фор-
ме.
Во втором случае реализация большинства функций предварительной обработки сигналов с датчиков и формирование управляющих сигналов для исполнительного механизма предпочтительно реализовать на месте, то есть ближе к датчику или ИМ. Это означает, что перечисленные ранее функции лучше реализовать в УСО или даже в первичных преобразователях. Для уменьшения погрешностей и повышения необходимо минимизировать длину каналов передачи аналоговой информации и передать большинство функций обработки сигналов на места. Это позволит широко применять высокоскоростные цифровые каналы связи в системах управления.
4 КЛАССИФИКАЦИЯ УСО
1.Устройства ввода дискретных сигналов (бинарных, импульсных и цифровых).
2.Устройства вывода дискретных сигналов.
3.Устройства ввода аналоговых сигналов (непрерывных).
4.Устройства вывода аналоговых сигналов.
Кустройствам ввода и вывода (УВВ) дискретных сигналов относят не только те, которые реализуют функцию включить/выключить, увеличить/уменьшить и т.п. при вводе и восприятии сигналов с 2-х или 3-х позиционных датчиков (включено/отключено, больше/норма/меньше), но также число-импульсные УВВ и преобразователи цифровых кодов (параллельный в последовательный и обратно).
5 ВВОД ДИСКРЕТНОЙ ИНФОРМАЦИИ
Рассмотрим устройства дискретного ввода, опрашиваемые процессором и устройства, инициирующие запрос прерывания при изменении состояния датчика, а также устройства с индивидуальной и групповой гальванической изоляцией датчиков.
5.1 УСТРОЙСТВО ВВОДА ДИСКРЕТНЫХ СИГНАЛОВ, ОПРАШИВАЕМОЕ ПРОЦЕССОРОМ.
Сигналы с дискретных датчиков преобразуются в логические уровни с помощью формирователей. Буфер, представляющий собой «схему с тремя состояниями выхода», передает информацию с формирователей в шину данных (ШД) МП по сигналу чтения (чт). Сигнал «чт» формируется селектором адреса (СА) в том случае, когда МП выставляет на шину адреса (ША) код, соответствующий адресу данного УСО и сопровождает его сигналом «ввод» по шине управления (ШУ).
|
10 мА |
|
+24 В |
R |
+5 B |
2,2 кОм |
||
-24 В |
|
|
0,1 мкФ Сф |
|
|
.
.
.
6
ФОР- |
|
|
|
|
|
|
|
|
МИ- |
|
|
|
|
|
|
|
|
РОВА |
|
Б |
|
|
|
ШД |
||
ТЕЛИ |
|
У |
|
|
|
|||
ЛОГИ- |
|
Ф |
|
|
|
|
|
|
ЧЕС- |
|
Е |
|
|
|
|
|
|
КИХ |
|
Р |
|
|
|
|
|
ША |
УРОВ- |
|
|
|
чт |
|
|
|
|
|
|
|
|
|
|
|
||
НЕЙ |
|
|
|
СА |
|
|
|
|
|
|
|
|
|
|
ШУ |
||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
питание
Для преобразования сигнала замкнут/разомкнут в логический уровень используют источник напряжения, включаемый последовательно с датчиком, токозадающим резистором R и оптроном. Резистор R задает номинальный ток светодиода (10 мА). Для устранения дребезга контактов устанавливают фильтрующую емкость Cф (0,1 мкФ). Для гальванической развязки датчиков и ЭВМ чаще всего применяются оптроны. Недостатком данного устройства является то, что оно не запоминает изменение состояния датчиков, если они не были прочитаны МП. Кроме того, простая RC-цепь не всегда надежно устраняет дребезг контактов.
5.2 УСТРОЙСТВО ВВОДА ДИСКРЕТНЫХ СИГНАЛОВ, ИНИЦИИРУЮЩЕЕ ПРЕРЫВАНИЕ.
.
.
.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗПР |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КК |
|
|
|
|
|
|||
|
|
|
|
|
|
ЗП |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ФОР- |
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
МИ- |
|
|
|
|
Е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РОВА |
|
|
|
|
Г |
|
|
|
|
Б |
|
|
|
|
ШД |
||||
ТЕЛИ |
|
|
|
|
И |
|
|
|
|
У |
|
|
|
|
|||||
ЛОГИ- |
|
|
|
|
С |
|
|
|
|
Ф |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ЧЕС- |
|
|
|
|
Т |
|
|
|
|
Е |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
КИХ |
|
|
|
|
Р |
|
|
|
|
Р |
|
|
|
|
|
|
ША |
||
УРОВ- |
|
|
|
|
|
|
|
|
|
|
|
|
|
чт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
НЕЙ |
|
|
|
|
(РГ) |
|
|
|
|
|
|
|
СА |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ШУ |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
питание
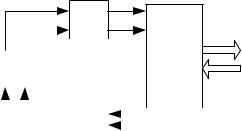
В отличие от предыдущей схемы имеется регистр РГ, запоминающий состояние датчиков. При любом изменении состояния датчиков компаратор кодов КК выработает сигнал запроса прерывания ЗПР и сигнал записи ЗП новой информации в регистр.
|
R=2,2кОм |
10мА |
|
Так как датчиком |
дискретных |
||
|
сигналов обычно являются контакты ре- |
||||||
|
|
|
ле или конечных выключателей, то есть |
||||
|
R |
|
гальванически изолированные от сети и |
||||
|
0,1 |
заземления элементы, то для преобразо- |
|||||
|
|
||||||
|
R |
|
вания |
используют |
групповое |
питание |
|
|
0,1 |
таких датчиков. |
|
|
|
||
|
|
|
Примеры: |
|
|
|
|
. |
|
|
|
|
|
|
|
|
0,1 |
|
Оптроны: 293ЛП1 |
|
|
||
. |
|
|
Регистры: 1533ИР22, |
1533ИР23 |
|||
. |
R |
|
|
Буферы: 1533АП6, |
1533АП3 |
||
|
|
589ИР12 (8212) – 8-разрядный |
|||||
|
|
|
|||||
|
|
|
буфер-регистр для формирования запро- |
||||
+24В |
Сф=0,1 |
|
са прерывания. |
|
|
|
|
|
|
|
|
|
|
||
-24В |
|
|
|
|
|
|
|
7
|
5.3 СТРУКТУРА УСТРОЙСТВ ВВОДА ЧИСЛО-ИМПУЛЬСНОЙ ИНФОРМАЦИИ |
|||||
|
|
|
|
|
|
С – clock (тактовый), E – enable (разрешающий). |
|
|
|
|
СТ2 |
|
|
|
|
|
|
ШД |
Технология изготовления БИС таймеров/счетчиков определяет |
|
C |
|
|
|
|
||
|
|
|
|
максимальную частоту счета входных сигналов. |
||
|
|
|
|
|
|
|
E |
|
& |
|
|
|
580ВИ53 (8253) – максимальная частота счета 2 МГц (n-МОП). |
|
|
|
чт |
1834ВИ54 (82С54) – 10 МГц (КМОП). |
||
|
|
|
|
|||
|
|
|
|
|
Модули ввода числоимпульсных сигналов необходимы для со- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пряжения с датчиками с частотным выходом типа счетчиков электро- |
|
|
|
|
|
|
энергии. Входные узлы сопряжения с датчиками аналогичны соответ- |
|
|
|
|
|
|
|
ствующим узлам устройств дискретного ввода. Устройства число-импульсного ввода часто выполняются совмещенными или перестраиваемыми на функцию число-импульсного вывода.
5.4 СТРУКТУРА БИС ПРОГРАММИРУЕМОГО ТАЙМЕРА 580ВИ53
Аналогичные схемы БИС используются в узлах число-импульсного ввода и вывода.
Состав структуры: 3 16-разрядных вычитающих счетчика, которые могут работать в 6 режимах каждый. Пуск и останов счетчиков может производиться внешними сигналами или командами программ, соответствующий режим задается записью управляющего слова в регистр управляющих слов этой БИС.
ШД |
|
|
|
тактовый |
Буфер |
|
|
разреш. |
|
8 |
|
Сч 0 |
||
|
данных |
|
|
|
|
|
|
|
|
|
|
|
|
выход |
RD |
|
|
|
тактовый |
WR |
СУ |
: |
Сч 1 |
разреш. |
A0 |
: |
|
||
|
|
|
||
A1 |
|
|
|
выход |
CS |
|
|
|
|
|
|
тактовый |
РУС |
Сч 2 |
разреш. |
|
||
|
|
выход |
Режимы счетчиков:
0 – программируемая задержка.
1 – программируемый ждущий мультивибратор (в ответ на фронт или срез входного сигнала на выходе – импульс заданной длительности).
2 – программируемый генератор тактовых сигналов (работает как делитель частоты). 3 – генератор прямоугольных импульсов.
4 – программно управляемый строб (генерируется последовательность импульсов управляемой длительности). 5 – аппаратно управляемый строб.
РУС – регистр управляющего слова. CS - Chip Select – Выбор Кристалла.
Содержимое счетчиков может быть прочитано двумя способами:
1)приостановив работу счетчика, прочитать содержимое байтов последовательно, затем разрешить счет.
2)записать управляющее слово, задающее режим защелкивания содержимого счетчика в момент чтения.
Для ввода число-импульсных сигналов, как правило, используются 2 канала: одни подсчитывает входные импульсы, а другой формирует измерительный интервал; либо один формирует тактовую частоту, а другой подсчитывает ее в течение измеряемого интервала времени.
6 УСТРОЙСТВА ВЫВОДА ДИСКРЕТНОЙ И ЧИСЛОИМПУЛЬСНОЙ ИНФОРМАЦИИ
Устройства вывода дискретной информации выполняются с возможностью чтения выходного регистра и без таковой.
6.1 СТРУКТУРА УСТРОЙСТВА ВЫВОДА ДИСКРЕТНОЙ ИНФОРМАЦИИ БЕЗ ВОЗМОЖНОСТИ ЧТЕНИЯ ВЫХОДНОГО РЕГИСТРА
Фиксирующий регистр может иметь разрядность большую, чем разрядность ШД. В этом случае СА должен иметь большее число выходов.
Гальваническая развязка осуществляется обычно оптопарами средней и большой мощности, твердотельными реле (содержит мощный выходной каскад, способный коммутировать достаточно большие напряжения и токи).
Для коммутации более мощных цепей (десятки ампер) выходной ключ должен иметь отдельное питание. Наличие источника питания для выходного ключа позволяет также реализовать его защиту от перегрузок.
|
|
|
8 |
|
|
ШД |
РГ |
ГР |
Реле |
|
|
|||
|
|
|
. |
. |
ША |
|
зп |
. |
. |
|
. |
. |
||
ШУ |
СА |
|
||
|
|
|
||
вывод |
|
|
|
|
Электромагнитное реле устанавливается на плате УСО (внутри компьютера) только в тех случаях, когда они коммутируют малые напряжения и токи, на которые рассчитан компьютерный разъем.
|
AOT127 |
F |
К1 |
+5V |
|
+24В |
|
|
|
||
|
|
|
-24В |
|
|
Д209 |
|
выход 220 |
1,0 |
|
|
|
|
КТ817 |
|
ТТЛ |
|
|
|
(ВКМОП) |
|
1кОм |
|
6.2 СТРУКТУРА С ВОЗМОЖНОСТЬЮ ЧТЕНИЯ ВЫХОДНОГО РЕГИСТРА
ШД
ША |
|
вывод |
СА |
ШУ ввод |
|
БУФЕР |
|
|
Чтение выходного регистра |
|
|
|
необходимо для формирования от- |
||
|
|
|
дельных битов управления, сохраняя |
|
|
|
|
остальные биты в прежнем состоя- |
|
|
|
|
нии без создания копии содержимого |
|
|
|
|
регистра в памяти ЭВМ (как это не- |
|
РГ |
ГР |
Реле |
обходимо делать в предыдущем слу- |
|
чае). |
||||
|
|
|
||
|
. |
|
. |
|
чт |
. |
|
. |
|
зп |
. |
|
. |
6.3 СТРУКТУРА УСТРОЙСТВ ВЫВОДА ЧИСЛОИМПУЛЬСНЫХ СИГНАЛОВ И ШИРОТНО- |
||||
ИМПУЛЬСНЫЙ МОДУЛЯТОР |
|
|
|
|
ШД |
|
fВХ |
|
|
|
|
Делитель частоты |
|
|
|
|
|
fВЫХ |
|
|
РГ |
|
разреш. |
& |
|
τвых |
|
|
|
|
КК |
|
В качестве примера ядра уст- |
|
|
|
|
||
fВХ |
|
|
ройств вывода числоимпульсных и ШИМ |
|
& |
|
|
сигналов можно привести БИС 580ВИ53. |
|
Сч |
fВЫХ |
В однокристальных микроконтроллерах |
||
разр. сч. |
разреш. вых. & |
|
этой цели служат встроенные таймеры, а |
|
|
|
|||
|
|
|
также узел счетчика с массивом защелок |
|
|
|
|
PCA (Program Counter Array). |
|

|
|
|
|
|
9 |
|
|
|
|
|
|
|
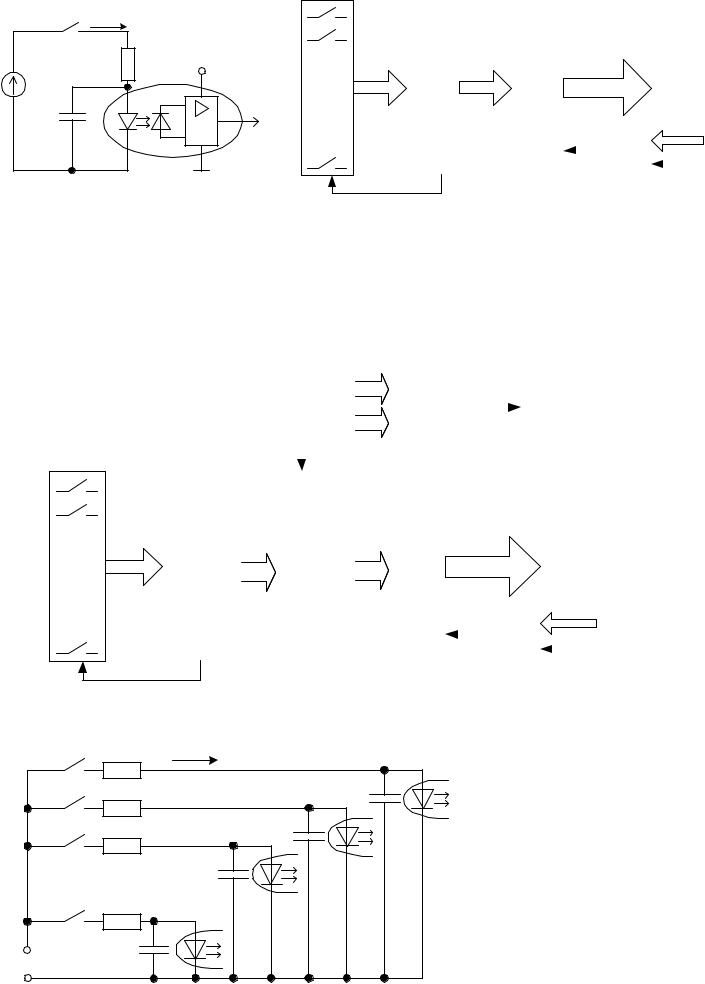
6.4 ВВОД АНАЛОГОВЫХ СИГНАЛОВ |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
в МП |
|
Д |
|
СУ |
|
НП |
|
ФП |
|
АЦП |
||
e, mB |
|
e, B |
|
I, mA |
|
I, mA |
|
|
N |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
20 |
|
|
20 |
|
|
|
|
|
|
|
|
4 |
|
|
4 |
|
|
|
|
|
Q, C |
|
e, mB |
|
|
e, B |
4 |
|
20 |
I, mA |
I, mA |
|
|
|
|
|
|
|
|||||
|
Д – датчик; |
|
|
|
СУ – согласующее устройство; |
|
|
|
|||
|
НП – нормирующий преобразователь; ФП – функциональный преобразователь и/или фильтр |
||||||||||
|
+U0 |
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
|
|
|
|
|
|
|
ТР |
|
|
ТП |
|
ТП – термопара |
|
|
|
|
||
|
|
|
ДУ |
|
ТР – терморезистор |
|
|
|
|
||
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
-U0 |
|
|
|
|
|
|
|
|
|
|
|
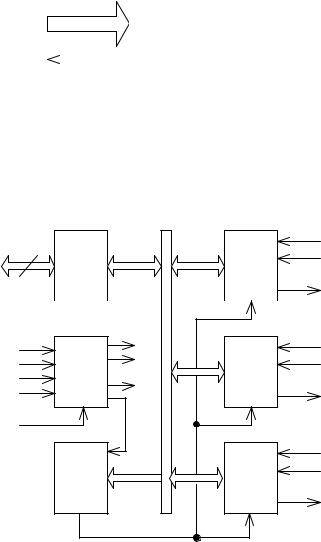
6.5 СТУКТУРА УСТРОЙСТВА ВВОДА АНАЛОГОВЫХ СИГНАЛОВ (УВАС) С ПАРАЛЛЕЛЬНЫМИ |
||||||||||
ЦИФРОВЫМИ ВЫХОДАМИ (а) |
|
|
|
|
|
|
|
|
|||
Д |
СУ |
НП |
ФП |
УВХ |
АЦП |
|
|
|
|
|
|
: |
: |
: |
: |
: |
: |
|
АМ |
ШД (data bus) |
|
||
|
|
|
|
|
|||||||
: |
: |
: |
: |
: |
: |
|
(DMUX) |
|
|
|
|
Д |
СУ |
НП |
ФП |
УВХ |
АЦП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
чт |
|
ША |
|
|
|
|
|
|
|
|
адрес |
|
(address bus) |
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пуск |
СА |
ввод |
ШУ |
|
|
|
|
|
|
|
|
готов |
|
вывод |
||
|
|
|
|
|
|
|
|
|
|
(control bus) |
|
|
6.6 СТРУКТУРА УВАС С ПАРАЛЛЕЛЬНЫМИ АНАЛОГОВЫМИ ВЫХОДАМИ (б) |
||||||||||
ШД
Д |
|
|
СУ |
|
|
НП |
|
|
ФП |
|
|
|
УВХ |
|
|
АМ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
: |
: |
: |
|
|
|
: |
|
|
|
|
АЦП |
|||||||||
|
|
|
|
|
|||||||||||||||||
: |
: |
: |
: |
: |
|
|
(MUX) |
|
|
||||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
|
СУ |
|
|
НП |
|
|
ФП |
|
|
|
УВХ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
пуск ША
готов СА выводввод ШУ

10
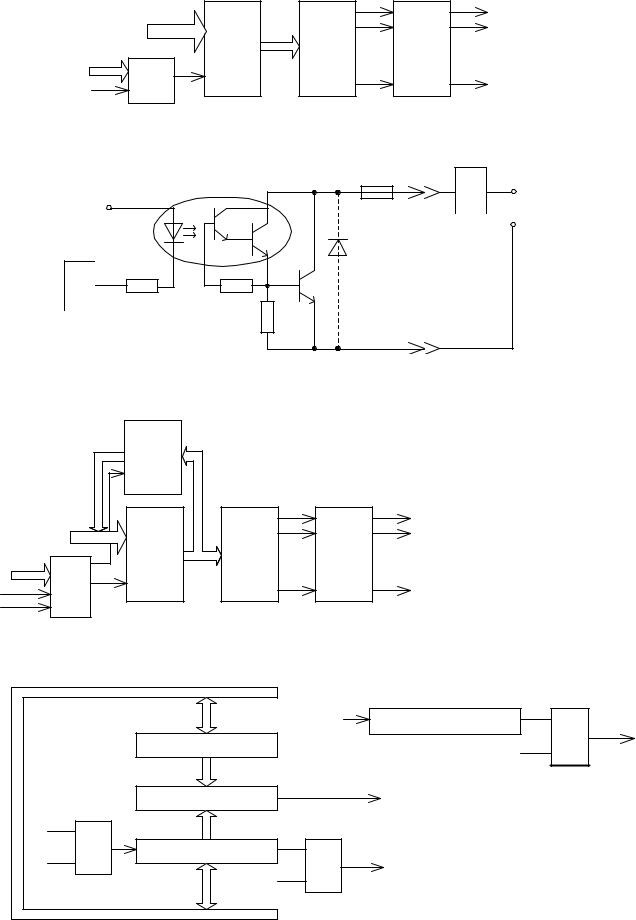
6.7 СТРУКТУРА УВАС С ПАРАЛЛЕЛЬНО-ПОСЛЕДОВАТЕЛЬНЫМИ АНАЛОГОВЫМИ ВЫХОДАМИ (в)
ШД
Д 
 СУ
СУ 
 НП
НП 
 ФП
ФП 
: |
: |
: |
: |
АМ |
|
УВХ |
|
АЦП |
: |
: |
: |
: |
(MUX) |
|
|
||
|
|
|||||||
|
|
|
|
Д |
СУ |
НП |
ФП |
|
|
|
|
|
|
пуск |
|
ША |
|
|
|
|
готов |
СА |
ввод |
ШУ |
|
|
|
|
|
вывод |
|
6.8 СТРУКТУРА УВАС С ПОСЛЕДОВАТЕЛЬНЫМИ АНАЛОГОВЫМИ ВЫХОДАМИ (г)
ШД
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УПУ |
|
|
УВХ |
|
|
АЦП |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АМ |
|
|
|
|
упр |
|
|
|
|
|
готов |
|
ША |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
адрес |
|
|
|
|
пуск |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
УУ |
ввод |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ШУ |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вывод |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Приведенные выше структуры различаются порядком обработки аналоговых и цифровых сигналов. Структурная организация обуславливает разное качество УВАС, то есть метрологические характеристики, динамические характеристики и стоимость. При оценке структур необходимо помнить, что преобразования сигналов в аналоговой форме вносят обязательно погрешность. При цифровых преобразованиях эта погрешность может отсутствовать, например, если не округлять результат (и применять помехоустойчивые методы передачи).
Структура на рисунке а) обеспечивает наивысшее качество, то есть наименьшую погрешность и наибольшее быстродействие, однако и наибольшую цену. Качество обеспечивается за счет параллельной обработки сигналов. Так как дорогостоящим элементом УВАС является АЦП, то структура на рисунке б) будет дешевле структуры на рисунке а) за счет сокращения АЦП. Структура б) сохраняет важную характеристику одновременности считывания сигналов с датчиков. Структура б) имеет недостаток, а именно дополнительный аналоговый элемент – аналоговый мультиплексор (АМ). Кроме того, сигналы с выходов УВХ (устройство выборки и хранения) подаются на АЦП через разные промежутки времени после выборки, то есть погрешность, вызванная разрядом конденсаторов запоминания, в каналах различная. В общем случае время преобразования всех каналов в структуре б) больше, чем в структуре а).
а) tВ/Х + tПР + N tЧТ
б) tВ/Х + N ( tПР + tЧТ),
– время перевода УВХ в режим хранения (сотни нс); tПР – время аналого-цифрового преобразования;
tЧТ – время ввода результата преобразования в ЭВМ.
В тех случаях, когда нет жестких требований к одновременности выборки по всем каналам, применяют структуру в) с одним УВХ. Это удешевляет схему и исключает погрешность разброса времени запоминания в каналах.
в) N (tВ/Х + tВ + tПР + tЧТ), где tВ – время выборки.
Структура г) является самой простой и дешевой, поэтому она наиболее распространена. Необходимо только помнить, что для такой структуры предварительное преобразование сигналов все-таки должно производиться, но эта задача перекладывается на первичные преобразователи сигналов датчика. Усилитель с программируемым коэффициентом усиления берет на себя функции нормализации сигнала. Он один обеспечивает разные коэффициенты усиления для каждого канала.
г) N (tВ/Х + tВ + tПР + tЧТ + tУПУ), здесь tУПУ – время установления усилителя с программируемым коэффициентом усиления (УПУ).
Структура г) реализована в однокристальных системах сбора данных. Кроме указанных элементов однокристальная система сбора данных имеет буферную память, емкость которой соответствует числу каналов, а также интерфейс с МП.
ПРИМЕРЫ:
УПУ: AD626; AD603; AD103; PGA.
АЦП: AD7715 (600Гц); AD9229 (2,2 МГц).
АМ: AD9300; ADG438; MAX663; 590КП6.