

УСО и МК 2010
.pdf31
Начальная точка характеристики преобразова-
ния - это точка, определяемая значением напряжения, равным разности значений напряжения первого межкодового перехода и 0.5 кванта преобразования.
Конечная точка характеристики преобразования - это точка, определяемая значением напряжения, равным сумме значений напряжения конечного межкодового перехода и 0.5 кванта преобразования (рис.1). При этом обычно имеется в виду среднее действительное значение кванта преобразования. В этом случае:
V0 = V0,1 - 0.5q;
VN = VN-1,N + 0.5q.
Область значений напряжения на аналоговом входе АЦП, ограниченная значениями напряжения, соответствующими начальной и конечной точкам характеристики преобразования, называется диапазоном входно-
го напряжения (диапазоном преобразования).
В дальнейшем, для упрощения рисунков, мы будем часто пользоваться понятием линеаризованной характеристики преобразования, т.е. ступенчатую характеристику мы будем заменять на линию, проходящую через середины действительных и номинальных ступеней квантования.
Параллельный сдвиг действительной характеристики преобразования АЦП вдоль оси абсцисс (адди-
тивная погрешность) определяется напряжением сме-
щения нуля - действительным значением входного напряжения в точке характеристики преобразования, соответствующей номинальному нулевому значению этого напряжения. Наиболее распространены четыре способа определения напряжения смещения (рис.3). Способы а, б, в обычно используют для однополярных АЦП, а способ г - для двуполярных. Каждому способу соответствует свое напряжение смещения
VСМ.1 = V0,1 - V0,1,H ,
где V0,1,H - номинальное значение напряжения межкодового перехода от кода числа 0 к коду числа 1; V 0,1 - действительное значение этого напряжения.
VСМ.2 = V1 - q = 0.5 (V0,1 + V1,2) - q ,
где q - значение кванта преобразования. VСМ,3 = V0,1 - q/2 ;
VСМ,4 = V0 = 0.5(V-1,0 + V0,1 ) .
Абсолютную погрешность АЦП в
конечной точке характеристики преобразо- вания называют погрешностью полной шка-
лы и измеряют обычно в единицах младшего разряда. Чаще всего погрешность полной шкалы измеряют без предварительной компенсации напряжения смещения; при этом значение напряжения смещения входит составной частью в погрешность полной шкалы.
Погрешностью коэффициента преобразова-
ния АЦП ( мультипликативной погрешно-
стью ) или отклонением коэффициента преобразования от номинального значения называют разность между действительным и номинальным значениями коэффициента преобразования. При этом номинальное значение коэффициента преобразования определяется тангенсом угла наклона к оси абсцисс прямой, проведенной через начальную и конечную точки номинальной характеристики преобразования АЦП, а действительное зна-
чение коэффициента преобразования - прямой, проведенной через начальную и конечную точки действительной характеристики преобразования.
32
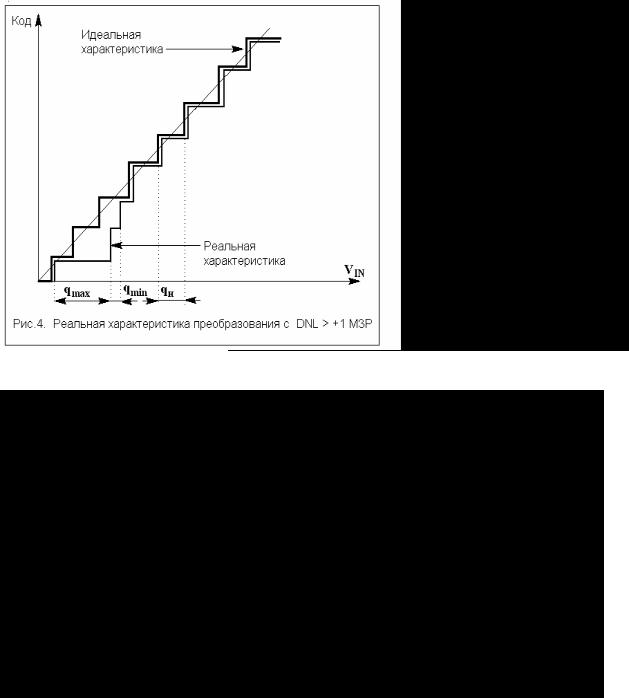
Погрешностью дифференциальной линейности ( дифференциальной нелинейностью ) АЦП в заданной точке i характеристики преобразования (DNL) называется разность между значением кванта преобразования в точке i (q i ) и средним действительным значением кванта преобразования (q)
DNL = q i - q = V i,i+1 - V i-1,i - q .
В спецификации на конкретные преобразователи значения DNL, выражаются в долях МЗР или процентах от полной шкалы (%FS).
Увысококачественных АЦП область возможных значений погрешности дифференциальной линейности АЦП
взаданной точке i характеристики преобразования имеет одностороннее ограничение снизу: значение DNL не может быть меньше -q, так как равенство DNL = -q означает, что напряжения межкодовых переходов V i,i+1 и V i ,i-1 совпадают и код числа i на выходе АЦП появиться не может. Возникает эффект пропадания кода.
Погрешность дифференциальной линейности определяет два важных свойства АЦП: непропадание кодов и монотонность характеристики (функции ) преобразования. Непропадание кодов - свойство АЦП выдавать все возможные выходные коды при изменении входного напряжения от начальной до конечной точки диапазона преобразования.
Монотонность функции преобразования - это неизменность знака приращения (при наличии шумов - усредненного приращения) выходного сигнала АЦП при монотонном изменении входного преобразуемого сигнала, но монотонность не гарантирует малых значений DNL (рис.4).
Если точки характеристики преобразования (ордината 1-й точки равна i, а абсцисса Vi = Vi-1,i + Vi,i-1 ) лежат на номинальной характеристике преобразования, то по определению погрешности АЦП отсутствуют (рис.5, а). В то же время погрешности дифференциальной линейности отличны от нуля и вызывают увеличение погрешности квантования по сравнению с погрешностью квантования идеального АЦП с таким же количеством разрядов.
Если во всех точках характеристики преобразования погрешность дифференциальной линейности больше -q, то АЦП имеет монотонную характеристику, причем обеспечивается непропадание выходных кодов. Однако непропадание кодов не означает монотонности характеристики преобразования, а монотонность не означает, что выходные коды не могут пропадать. На рис.5, б приведен участок характеристики АЦП, на выходе которого пропадает код числа i, хотя эта характеристика монотонна. На рассмотренном участке имеется
двойной межкодовый переход кода числа i-1 к коду числа i+1. На рис.5, в приведен участок характеристики преобразования АЦП, на выходе которого коды не пропадают, однако эта характеристика не является монотонной. На данном участке имеется обратный межкодовый переход от кода i+1 к коду i, причем коду i соответствуют две различные области диапазона входного напряжения.
Погрешность дифференциальной линейности влияет на погрешность аналогоцифрового преобразования так же, как шум квантования.
33
Шум (неопределенность кода для постоянного сигнала). В идеале повторяющиеся преобразования фиксированного постоянного входного сигнала должны давать один и тот же выходной код. Однако, вследствие неизбежного шума в широкополосных схемах АЦП, существует некоторый диапазон входных кодов для заданного входного напряжения. Если подать на АЦП постоянный сигнал, то в результате получится некоторое распределение кодов. Если подогнать Гауссовское распределение к этой гистограмме, то стандартное отклонение будет примерно эквивалентно среднеквадратическому значению входного шума АЦП.
Отношение сигнал/шум (SNR). Это отношение среднеквадратического значения входного сигнала Vrms к среднеквадратическому значению шума σкв, который определяется как сумма всех остальных спектральных компонент, включая гармоники, но исключая постоянную составляющую, для входного сигнала (-1дБ) от полной шкалы:
SNR = 20 lg (Vrms / σкв ).
Для идеального n -разрядного АЦП с диапазоном преобразования Vm
среднеквадратическое значение шума квантования, распределенного по закону равномерной плотности в промежутке от -q/2 до +q/2, определяется как:
σкв
откуда получаем:
SNR = (6.02 × n + 1.76), дБ.
Таким образом, для идеального 12-разрядного АЦП получаем SNR = 74 дБ.
Количество эффективных разрядов (ENOB). Если источником погрешности являются собственные шумы АЦП (тепловой и пр.), то количество эффективных разрядов N определяется из выражения: N = (SNR - 1.76)/6.02, где SNR - это реальное значение отношения сигнал/шум для конкретного АЦП. Необходимо заметить, что большое влияние на этот параметр оказывают динамические характеристики АЦП (скорость нарастания, время выборки УВХ и т.п.), которые делают N сильно зависимым от частоты входного сигнала.
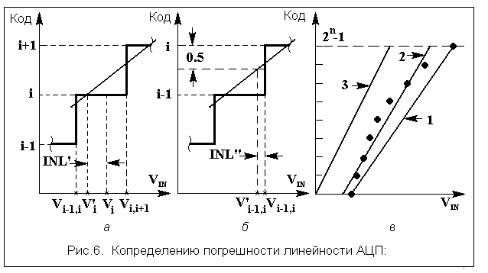
Для многих областей применения АЦП важнейшей его характеристикой является погрешность линейности INL (нелинейность, интегральная нелинейность). Существующие определения погрешности линейности INL можно разделить на две группы (рис.6, а, б). Для первой группы (рис.6, а) абсолютной погрешностью линейности АЦП в заданной точке характеристики преобразования называется разность между расчетным значением входного напряжения V′i, определенным по линеаризованной характеристике преобразования АЦП, и действительным значением входного напряжения Vi, соответствующим заданной точке характеристики преобразования
INL′ = V′i - Vi .
Для второй группы (рис.6, б) абсолютная погрешность линейности АЦП в заданной точке характеристики преобразования - это разность между расчетными значениями напряжения заданного межкодового перехода (V′i- 1,i ), определенным по линеаризованной характеристике преобразования, и действительным значением этого напряжения
INL′′ = V′i-1,i - Vi-1,i .
На рис.6, в приведен пример проведения линеаризованной прямой: 1, 2 - линеаризованная разными методами действительная характеристика преобразования АЦП; 3 - линеаризованная номинальная характеристика преобразования АЦП; ••••• - точки действительной характеристики преобразования АЦП. В спецификациях на конкретные преобразователи значения INL выражаются в долях МЗР или процентах от полной шкалы (%FS).
Наиболее часто линеаризующая прямая проводится через начальную и конечную точки действительной характеристики преобразования (прямая 1, рис.6, в).
Разработчики часто задают линеаризующую прямую так, чтобы то или иное числовое значение погрешности линейности (например, максимальное по модулю значение или среднеквадратическое отклонение) оказалось бы минимальным (прямая 2, рис. 6, в).
В общем случае не имеется однозначной связи между DNL и INL. Возможны ситуации, когда при малых значениях INL значения DNL могут достигать больших величин (см. рис.5, а) и наоборот. Так, для 8-разрядного преобразователя со значением дифференциальной нелинейности в первой половине шкалы +0,1МЗР, а во второй - 0,1МЗР значение интегральной нелинейности может достигать значения 12,8 МЗР (см. рис. 5, г).
Коэффициент подавления
нестабильности источников питания (PSRR). Это отношение изменения диапазона полной шкалы, или входного напряжения смещения, к изменению напряжений питания.
Перекрестные наводки
(по методу EIAJ). Выраженное в дБ отношение амплитуды сигналов: синусоиды частотой 1 кГц с размахом, равным полной шкале, к амплитуде возникающего под этим воздействием сигнала на выходе одного из каналов, вход которого заземлен.
Для сравнения погрешностей аналого-цифрового пре-
34
образования в реальных условиях эксплуатации необходимо учитывать целый ряд других параметров и характеристик АЦП, которые в той или иной мере приводятся (но могут и отсутствовать) в технической документации. В частности, необходимо учитывать: зависимости характеристик АЦП от времени, температуры окружающей среды,
напряжений питания и других факторов; входное сопротивление и входной ток АЦП; параметры случайной со-
ставляющей погрешности, вызванной шумами АЦП; параметры шумов АЦП в заданном частотном диапазоне: ток смещения, разность входных токов, коэффициент ослабления синфазного сигнала - для АЦП с дифференциальным входом; входные импедансы включенных и отключенных каналов, идентичность коэффициентов передачи каналов, меру паразитного прохождения сигнала из закрытого в открытый канал, различия в значениях погрешностей смещения и усиления в разных каналах - для многоканальных АЦП.
12.5 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ АЦП.
Существует целый ряд динамических характеристик, определяющих быстродействие АЦП [9].
Важнейшей из них является время преобразования t пр - интервал времени от начала изменения входного напряжения, представляющего собой скачок напряжения постоянного тока, значение которого обычно равно диапазону входного напряжения, до момента, при котором код на выходе АЦП будет отличаться от номинального не более чем на значение статической погрешности. Время преобразования складывается из двух интервалов времени - време-
ни задержки запуска t з и времени цикла кодирования t ц: t пр = |
t з + t ц , где t з |
- минимальный интервал времени от |
момента подачи скачкообразного входного сигнала до момента |
подачи сигнала |
запуска АЦП, при котором выход- |
ной код отличается от номинального не более чем на значение статической погрешности; t ц - время, в течение которого осуществляется непосредственное преобразование входного напряжения в код.
Время задержки запуска t з характеризует длительность переходных процессов в аналоговых цепях АЦП (усилители, аттенюаторы и т.п.), вызванных скачкообразным изменением входного сигнала. Для расширения частотного диапазона входных сигналов прецизионных быстродействующих АЦП в настоящее время практически используется один путь - применение устройств выборки-хранения (УВХ) напряжений. Для преобразователей с УВХ на входе t з фактически равно времени выборки УВХ.
Наряду с временем преобразования используют и другую динамическую характеристику АЦП - максималь- ную частоту преобразования. В общем случае максимальной частотой преобразования называют наибольшую час- тоту дискретизации входного сигнала, при которой выбранный параметр АЦП не выходит за заданные пределы. При этом обычно предполагают, что входной сигнал не изменяется за время аналого-цифрового преобразования. Выбранным параметром может быть, например, монотонность характеристики преобразования или погрешность линейности. Довольно часто под максимальной частотой преобразования понимают величину, обратную t пр или t ц.
Однако последнее правило справедливо не для всех типов АЦП. |
Так, в преобразователях, использующих конвейер- |
ный алгоритм работы частота дискретизации выше, чем 1 / t пр |
этого АЦП. Обычно частота дискретизации задается |
в кГц, МГц или kSPS, MSPS (соответственно 1000 или 1 000 000 преобразований в секунду). Таким образом, для преобразователей, на выходе которых смена кодов осуществляется за время , меньшее времени цикла кодирования, максимальная частота преобразования является самостоятельной динамической характеристикой.
Для расчета погрешности аналого-цифрового преобразования, вызванной изменением входного сигнала за время преобразования, необходимо знать время задержки (опережения) отсчета t зо . По определению: t зо = t о - t од , где t о - заданный момент отсчета, т.е. момент времени, к которому отнесен отсчет - значение выходного кода АЦП, соответствующее значению измеряемого сигнала; t од - момент времени, которому в действительности соответствует отсчет (действительный момент отсчета). Этот параметр актуален для параллельных АЦП без УВХ.
Время задержки отсчета представляет собой случайную величину, зависящую от ряда влияющих величин, в том числе от параметров входного сигнала. Оно может принимать различные значения в разных точках характеристики преобразования АЦП.
Наибольшее распространение получили два способа нормирования времени задержки отсчета. В первом случае время задержки отсчета нормируют пределами допустимого значения задержки, разность которых называют апертурным временем t А. Таким образом, под апертурным временем понимается время, в течение которого сохраняется неопределенность между значением выборки и временем, к которому оно относится.
Во втором случае нормируется систематическая составляющая времени задержки отсчета и апертурная неопределенность δt A - числовая характеристика случайных изменений апертурного времени, например, среднеквадратическое отклонение апертурного времени.
На рис.21 показано влияние апертурной неопределенности и разброса апертурного времени на характеристику преобразования АЦП [1, 3].
Время установления. Время, необходимое АЦП для достижения номинальной точности после того, как на его вход (или вход встроенного УВХ был подан ступенчатый сигнал равный полному диапазону входного сигнала).
Время восстановления после перенапряжения. Это время, которое требуется АЦП для достижения номинальной точности после перенапряжения на аналоговом входе (на 50% больше диапазона полной шкалы), и измеряемое от того момента, когда входное напряжение возвращается в пределы входного диапазона АЦП.

35
При расчетах динамических погрешностей аналого-цифрового преобразования часто необходимо, помимо рассмотренных, учитывать и другие (вспомогательные) характеристики АЦП: входную емкость, в особенности ее составляющую, зависящую от входного
сигнала; неравномерность амплитудно- частотной характеристики АЦП; ско- рость изменения входного сигнала; диа- пазон частот входного сигнала; время восстановления после перегрузки; коэф-
фициент нелинейных искажений; время хранения (для АЦП с УВХ); отношение сигнал-шум (SNR) при синусоидальном входном сигнале в заданном частотном диапазоне; отношение сигнал-шум плюс
искажения (SINAD); интермодуляцион- ные искажения (IMD); динамический диапазон свободный от паразитных ком- понент (SFDR).
Для определения динамических характеристик АЦП в настоящее время широко используются методы спектрального анализа результатов анало- го-цифрового преобразования синусоидального входного сигнала, основанные на статистической обработке с использо-
ванием Быстрого Преобразования Фурье
(БПФ). Эти методы имеют ряд существенных преимуществ по сравнению с традиционными (для их реализации не требуется, например, применять образцовые быстродействующие ЦАП, АЦП). В настоящее время данные методы используются в основном в АЦП с числом двоичных разрядов 12 и менее. Однако намечается тенденция к распространению их на прецизионные быстродействующие АЦП с большим числом разрядов.
13 Приборные измерительные системы и виртуальные измерительные приборы
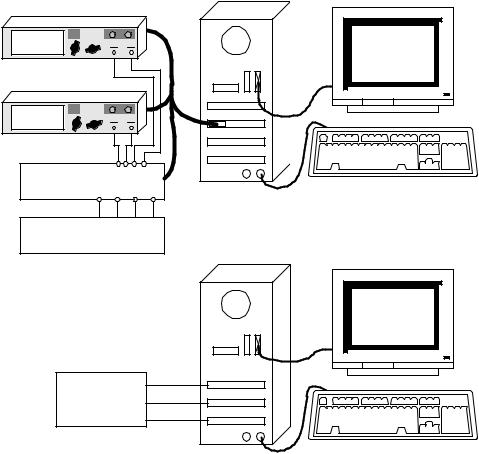
Если статические характеристики измерительных каналов можно определять вручную с помощью ЦИП (цифровых измерительных приборов), то динамические характеристики УСО могут быть определены только автоматической приборной измерительной системой (АПИС) или виртуальным измерительным прибором (ВИП) на основе ПЭВМ, так как требуется регистрация и обработка быстропротекающих процессов.
ВИП – это ПЭВМ со встроенными модулями УСО и снабженная программным обеспечением для управления модулями, отображения и регистрации измерений. В качестве модулей используются многоканальные АЦП, ЦАП и др. ВИП всегда выполняются многоканальными и комплексными, то есть совмещающими в себе функции разных приборов. Для ПЭВМ отечественные и зарубежные фирмы выпускают комплекты модулей УСО с разнообразными характеристиками и соответствующим программным обеспечением. Для АПИС стандартным является магистральный параллельный интерфейс – канал общего пользования (КОП, его аналог – IEEE-488). Для АПИС выпускаются стандартные контроллеры магистрали КОП для ПЭВМ.
|
36 |
|
|
КОП |
|
|
|
Дисплей |
Коммутатор |
Системный |
Клавиатура |
|
||
|
|
|
|
блок |
|
Объект измерения |
|
|
|
модули |
Дисплей |
Объект |
|
|
|
|
|
измерения |
|
|
|
Системный |
Клавиатура |
|
|
|
|
блок |
|
.
14 Локальные вычислительные сети
14.1 Интерфейсы. Термины и определения.
Для описания совокупности схемотехнических средств сопряжения составных элементов средств вычислительной техники (СВТ) и их функций используются понятия “интерфейс”, ”стык” и ”протокол”.
Стык - место соединения устройств передачи сигналов данных, входящих в сети передачи данных. Понятие стык используется и для описания функций и средств сопряжения элементов системы передачи данных (СПД).
Протокол - строго заданная процедура (совокупность правил), определяющая способ выполнения определенного класса функций соответствующими СВТ.
Стандартный интерфейс – совокупность унифицированных технических, программных и конструктивных средств, необходимых для реализации взаимодействия функциональных элементов автоматических систем обработки информации (СОИ) при условиях, предписанных стандартом и направленных на обеспечение информационной, электрической и конструктивной совместимости указанных элементов.
Близость понятий “протокол” и ”интерфейс” подчеркивается тем, что во многих случаях одна и та же совокупность средств и функций взаимодействия называется в разных документах по-разному: ”интерфейс” и ”протокол”.
В микропроцессорных системах (МПС) часто используется более одного интерфейса, а в вычислительных системах всегда используется множество интерфейсов, поэтому к ним применяют термин “интерфейсная система” или ”система протоколов”.
Стандартизация интерфейса полезна и необходима для обеспечения совместимости оборудования различных фирм, для облегчения новых разработок оборудования, требованиям которых удовлетворяет стандартный интерфейс.
Интерфейсы, широкое применение которых подтверждено практикой наиболее жестко стандартизуются (Centronix, RS-232). С другой стороны бурно развивающаяся вычислительная техника требует разработки новых интерфейсов или расширения возможностей старых, поэтому многие интерфейсы ряд параметров определяют не строго, а в качестве рекомендации, а также предполагают свободные ресурсы для пользователя (зарезервированные коды команд для пользователя, дополнительные байты шин адреса, данных и т.п.).
Основное назначение интерфейсов, стыков и протоколов - унификация внутрисистемных и межсистемных связей с целью эффективной реализации прогрессивных методов проектирования средств автоматизации. Основная функция интерфейсов и стыков – обеспечение информационной, электрической и конструктивной совместимости СВТ.
Информационная совместимость – согласованность действий функциональных элементов в соответствии с совокупностью логических условий. Логические условия определяют структуру и состав унифицированного набора шин; набор процедур по реализации взаимодействия и последовательности их выполнения для различных режимов
37
функционирования; способ кодирования и формат команд, данных, адресной информации и информации состояния; временные соотношения между управляющими сигналами, ограничения их на форму и взаимодействие.
Условия информационной совместимости определяют объем и сложность схемотехнического и программного обеспечения и, соответственно, основные технико-экономические показатели.
Электрическая совместимость – согласованность статических и динамических параметров электрических сигналов в системе шин с учетом ограничений на пространственное размещение устройств интерфейса и техническую реализацию приемопередающих элементов (ППЭ).
Условия электрической совместимости определяют: тип ППЭ, соотношения между логическими и электрическими состояниями сигналов и пределы их изменения, коэффициенты нагрузочной способности ППЭ и значения допустимой емкостной и резистивной нагрузок в устройстве, схему согласования линий, допустимую длину линий к разъемам, требования к источникам и цепям электрического питания, требования по помехоустойчивости.
Конструктивная совместимость – согласованность конструктивных элементов интерфейса, предназначенных для обеспечения механических контактов соединений и механической замены схемных элементов, блоков и устройств.
Условия конструктивной совместимости определяют: типы соединительных элементов (разъем, штекер, распределение линий связи внутри соединительного элемента); конструкцию платы, каркаса, стойки; конструкцию кабельного соединения.
Условия конструктивной совместимости в стандартах не всегда определяются полностью, иногда могут отсутствовать или иметь несколько вариантов.
14.2 ЛОКАЛЬНЫЕ СЕТИ РАСПРЕДЕЛЕННЫХ СИСТЕМ УПРАВЛЕНИЯ.
Локальные сети в распределенных системах управления (РСУ) не включаются в контуры регулирования. Они предназначены для передачи инструкций локальным контроллерам, периодического сбора информации, передачи аварийных сигналов, передачи настроек и программ локальным контроллерам, обмена информацией для обеспечения согласованной работы взаимосвязанных контуров регулирования.
Для РСУ применяются так называемые малые локальные сети – это последовательные магистральные интерфейсы, которые имеют общее название fieldbus (полевая шина).
Общие требования к малым сетям РСУ:
1)наличие нормированных сопряжений;
2)простое задание адресов подключения устройств;
3)преимущественное применение двухпроводных линий;
4)максимальное число подключенных к магистрали устройств (до 1000);
5)время передачи команды управления: 5-50 мс;
6)задержка запроса на передачу данных от 5 мс до 5 с;
7)гальваническая развязка между средствами автоматизации и технологическим оборудованием (допустимое напряжение изоляции не менее 500В);
8)допускаются 2 необнаруженные ошибки за 1000 лет;
9)возможность питания устройств, подключенных к магистрали по проводам магистрали.
Наиболее известные и распространенные полевые магистрали:
•FIELDBUS;
•MODBUS;
•BITBUS;
•PROFIBUS.
Физический уровень у полевых интерфейсов определяется стандартом RS-485. Существует перспективный интерфейс ECHELON. С появлением интеллектуальных датчиков развитие получили специальные малые локальные сети для них, например, I2C (IIC), MicroLAN.
15 Особенности проектирования микроконтроллерных устройств управления объектами
15.1 Введение в предметную область.
Простейший в серии 1816 микроконтроллер МК48 имеет на кристалле ( в корпусе БИС ) следующие аппаратные средства: процессор разрядностью 1 байт; стираемое программируемое ПЗУ программ емкостью 1 Кбайт; ОЗУ данных емкостью 64 байта; программируемый 8-битный таймер/ счетчик; программируемые схемы ввода/ вывода ( 27 линий ); блок векторного прерывания от двух источников; генератор; схему синхронизации и управления.
Значительно более сложный и развитый МК51 имеет в своем составе такие аппаратурные средства: процессор, в состав которого входят 1-байтное АЛУ и схемы аппаратурной реализации команд умножения и деления; стираемое ПЗУ программ емкостью 4 Кбайта, ОЗУ данных емкостью 128 байт; два 16-битных таймера/ счетчика; программируемые схемы ввода/вывода ( 32 линии ); блок двухуровневого векторного прерывания от пяти источников; асинхронный канал дуплексного последовательного ввода/ вывода информации со скоростью до 375 кбит/ с; генератор, схему синхронизации и управления.
Структуры микроконтроллеров серии 1816 и их системы команд таковы, что в случае необходимости функ- ционально-логические возможности контроллеров могут быть расширены. С использование внешних дополнительных БИС постоянной и оперативной памяти адресное пространство МК может быть значительно расширено , а путем подключения различных интерфейсных БИС число линий связи МК с объектом управления может быть увеличено практически без ограничений.
Микроконтроллеры серии 1816 требуют одного источника электропитания напряжением + 5 В ±10% процентов, рассеивают мощность около 1,5 Вт и работают в диапазоне температур 0 до 70 0С. По входам и выходам МК се-

38
рии 1816 электрически совместите с интегральными схемами ТТЛ. МК48 и МК51 имеют различные системы команд и, следовательно, не обладают свойством программной совместимости на уровне объектных кодов. При этом они программно совместимы по принципу «снизу вверх» (МК48МК51) на уровне исходных текстов программ, написанных на языке ассемблера.
Таблица 1 - Семейство МК серии 1816
Тип МК |
Емкость резидентной памя- |
Емкость резидентной па- |
Частота синхронизации, |
|
|
ти программ, Кбайт |
мяти данных, байт |
МГц |
|
КМ1816ВЕ48 |
СППЗУ |
1 |
64 |
6 |
КМ1816ВЕ49 |
ПЗУ |
2 |
128 |
11 |
КМ1816ВЕ35 |
- |
|
64 |
11/6 |
КМ1816ВЕ51 |
СППЗУ 4 |
128 |
12 |
|
КМ1816ВЕ31 |
- |
|
128 |
12 |
Микроконтроллер МК48 может работать в диапазоне частот синхронизации от 1 до 6 МГц, а минимальное время выполнения команды составляет 2,5 мкс. Микроконтроллер МК51 может работать в диапазоне частот от 1,2 до 12 МГц, при этом минимальный цикл выполнения команды равен 1мкс, а быстродействие равно одному миллиону коротких операций в секунду.
Из такой краткой характеристики однокристальных МК серии 1816 видно, что эти приборы обладают значительными функционально-логическими возможностями и представляют собой эффективное средство компьютеризации (автоматизации на основе применения средств и методов обработки данных и цифрового управления) разнообразных объектов и процессов.
Семейство МК серии 1816 имеет в своем составе различные модификации, отличающиеся друг от друга признаками, которые перечислены в табл.1.
Анализ основных признаков МК серии 1816 показывает, что МК48 и МК51 целесообразно использовать на этапе опытно-конструкторской разработки и отладки систем, а также в малосерийных изделиях. Микроконтроллер МК49 имеет масочное ПЗУ программ, и поэтому его следует применять в крупносерийных изделиях. Микроконтроллеры, в которых нет резидентной памяти программ, используют, как правило, не в конечных изделиях, а в автономных отладочных устройствах и многофункциональных программируемых контроллерах, где в качестве памяти программ и данных используются внешние БИС и имеются средства загрузки программ.
15.2Основные положения
Вустройства управления объектами (контролерах) на основе МК аппаратурные средства и программное обеспечение существуют в форме неделимого аппаратурно-программного комплекса. При проектировании контролеров приходится решать одну из самых сложных задач разработки, а именно задачу оптимального распределения функций контролера между аппаратурными средствами и программным обеспечением. Решение этой задачи осложняется тем, что взаимосвязь и взаимовлияние аппаратурных средств и программного обеспечения в микропроцессорной технике претерпевают динамичные изделия. Если в начале развития МПтехники определяющим было правило, в соответствии с которым аппаратурные средства обеспечивают производительность, а программное обеспечениедешевизну изделия, то в настоящее время это правило нуждается в серьезной корректировке. Так как МК представляет собой стандартный массовый (относительно недорогой) логический блок, конкретное назначение которого определяет пользователь с помощью программного обеспечения, то с ростом степени интеграции и , следовательно, функциональнологических возможностей МК резко понижает стоимость изделия в пересчете на выполняемую функцию, что
вконечном итоге и обеспечивает достижение высоких технико-экономических показателей изделий на МК. При этом затраты на разработку программного обеспечения в 2-10 раз превышают (за время жизни изделия) затраты на приобретение и изготовление аппаратурных средств.
Внастоящее время наибольше распространение получил методологический прием, при котором весь цикл раз-
работки контроллеров рассматривается как последовательность трех фаз проектирования:
•анализа задачи и выбора (и или разработки) аппаратурных средств контроллера;
•разработки прикладного программного обеспечения;
•комплексирования аппаратурных средств и программного обеспечения в прототипе контроллера и его отладки. Фаза разработки программного обеспечения, т.е. фаза получения прикладных программ, в свою очередь, разби-
вается на два существенно различных этапа:
•“от постановки задачи к исходной программе”;
•“от исходной программы к объектному модулю”.
Этап разработки “от исходной программы к объектному модулю” имеет целью получение машинных кодов прикладных программ, работающих в МК. Этот этап разработки прикладного программного обеспечения легко поддается формализации и поддержан всей мощью системного программного обеспечения МК, направленного на автоматизацию процесса получения прикладных программ. В состав средств системного программного обеспечения входят трансляторы с различных алгоритмических языков высокого уровня, ассемблеры, редакторы текстов, программыотладчики, программы-документаторы и т.д. Наличие всех этих системных средств придает инженерной работе на этом этапе проектирования контроллеров характер ремесла, а не инженерного творчества. Так как в конечном изделии (контроллере) имеют только “голый” МК и средства его сопряжения с объектом, то выполнять отладку разрабатываемого прикладного программного обеспечения на нем невозможно (из-за отсутствия средств ввода, вывода, ОЗУ большой емкости и операционной системы), и, следовательно, разработчик вынужден обращаться к средствам вычислительной техники для выполнения всех формализуемых стадий разработки: трансляции, редактирования, отладки, загрузки объектных кодов в программируемую постоянную память МК. Попутно отметим, что системные средства автоматизации разработки прикладных программ МК на этапе “ от исходной программы к объектному модулю” ши-
39
роко распространены и осуществляют в среде операционных систем микро ЭВМ «Электроника-60», СМ-1800, СМ1300 и присутствуют в операционных системах персональных компьютеров типа ЕС-1840, ЕС-1841.
Совсем по-другому выглядит инженерный труд на этапе разработки программного обеспечения “ от постановки задачи к исходной программе” , так как он практически не поддается формализации, и, следовательно не может быть автоматизирован. Проектная работа здесь носит творческий характер, изобилует решениями, имеющими “волевую” или “вкусовую” окраску, и решениями , имеющими “волевую” или “вкусовую” окраску, и решениями, продиктованными конъюнктурными соображениями. В силу перечисленных обстоятельств именно на этапе проектирования “от постановки задачи к исходной программе” разработчик сталкивается с наибольшим количеством трудностей. Качество получаемого прикладного программного обеспечения контроллера всецело зависит от уровня проектных решений, принятых на этапе разработки “от постановки задачи к исходной программе”. Уровень проектных решений в свою очередь из-за отсутствия теории проектирования программируемых контроллеров определяется только опытом, квалификацией и интуицией разработчика. Однако накопленный опыт убеждает в том, что систематический подход к процессу разработки прикладных программ для контроллеров обеспечивает достижение хороших результатов даже начинающими разработчиками.
15.3 Структура МК-системы управления
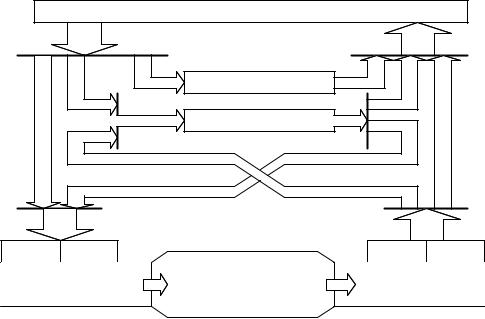
Типовая структура МКсистемы управления показана на Рисунок 1 и состоит из объекта управления, микроконтроллера и аппаратуры их взаимной связи.
Микроконтроллер
УС |
ОС |
Таймеры
Флаги |
СУ |
|
|
СС |
|
|
ЦАП |
ФС |
|
АЦП |
ФС |
|
|
|
Объект управления |
|
|
|
Исполнительные |
или |
Датчики |
|||
механизмы |
регулируемый |
||||
|
|
||||
|
|
процесс |
|
|
|
Рисунок 1 - Структура цифровой системы управления на основе МК
Микроконтроллер путем периодического опроса осведомительных слов (ОС) генерирует в соответствии с алгоритмом управления последовательности управляющих слов (УС). Осведомительные слова это сигналы состояния объекта (СС), сформированные датчиками объекта управления, и флаги. Выходные сигналы датчиков вследствие их различной физической природы могут потребовать промежуточного преобразования на аналого-цифровых преобразователях (АЦП) или на схемах формирователей сигналов (ФС), которые чаще всего выполняют функции гальванической развязки и формирования уровней двоичных сигналов стандарта ТТЛ.
Микроконтроллер с требуемой периодичностью обновляет управляющие слова на своих выходных портах. Некоторая часть управляющего слова интерпретируется как совокупность прямых двоичных сигналов управления (СУ), которые через схемы формирователей сигналов (усилители мощности, реле, оптроны и т.п.) поступают на исполнительные механизмы (ИМ) и устройства индикации. Другая часть управляющего слова представляет собой упакованные двоичные коды, которые через цифро-аналоговые преобразователи (ЦАП) воздействуют на исполнительные механизмы аналогового этапа. Если объект управления использует цифровые датчики и цифровые исполнительные механизмы, то наличие ЦАП и АЦП в системе необязательно
В состав аппаратуры связи, которая как правило, строится на интегральных схемах серии ТТЛ, входит регистр флагов, на котором фиксируется некоторое множество специфицируемых признаков как объекта управления, так и процесса работы контроллера. Этот регистр флагов используется в качестве аппаратурного средства реализации механизма взаимной синхронизации относительно медленных и вероятностных процессов в объекте управления и быстрых процессов в контроллере. Регистр флагов доступен как контроллеру, так и датчикам. Вследствие этого он является удобным местом фиксации сигналов ГОТОВ/ ОЖИДАНИЕ при передачах с квитированием или сигналов ЗАПРОС ПРЕРЫВАНИЯ/ ОДТВЕРЖДЕНИЕ при взаимодействии контроллера и объекта в режиме прерывания. Если МКсис- тема имеет многоуровневую систему прерываний, то регистр флагов содержит схему упорядочивания приоритетов.
Для аппаратурной реализации временных задержек, формирования сигналов требуемой частоты и скважности в состав аппаратуры связи включают программируемые интервальные таймеры в том числе, если их не в составе МК или их число недостаточно.
40
Законы функционирования МКсистемы управления со структурой, показанной на рис. 1, всецело определяются прикладной программой, размещаемой в резидентной памяти программ МК. Иными слова, специализация контроллера типовой структуры на решение задачи управления конкретным объектом осуществляется путем разработки прикладных программ МК и аппаратуры связи МК с датчиками и исполнительными механизмами объекта.
15.4 Особенности разработки аппаратурных средств МК-систем
Применение однокристальных МК в устройствах управления объектами привело к кардинальным изменениям
вразработке аппаратурных устройств и систем. И дело здесь заключается в следующем. Микроконтроллер представляет собой логический автомат с высокой степенью детерминированности, который допускает очень немного вариантов его системного включения. Именно поэтому типовой состав аппаратурных средств ядра любой МКсистемы (МК, ППЗУ,ОЗУ, интерфейсные БИС, схемы синхронизации и системного управления) оформляются конструктивно в виде одноплатных универсальных программируемых контроллеров, которые предназначены для встраивания в контур управления объектом или процессом. На печатной плате такой МК-системы имеются гнезда для установки БИС пользователя. На некоторых моделях таких плат имеется еще и так называемое “монтажное поле пользователя”, на котором он имеет возможность смонтировать свои специфические схемы, такие как оптронные развязки, АЦП, ЦАП, реле и т.п. Кроме того, на плате МКсистемы может быть размещен источник электропитания. Если разработчик положит
воснову проектируемого изделия такой одноплатный контроллер, то он будет избавлен от необходимости разрабатывать и сопровождать конструкторской и эксплуатационной документацией самую сложную, центральную часть изделия. Как известно, вес документации на систему автоматического управления примерно на порядок превышает вес самой системы, а изготовление и согласование этой документации растягивается на годы. При использовании стандартного контроллера в качестве комплектующего системного элемента объем документации на аппаратурные средства изделия многократно сокращаются и может содержать только документацию на аппаратуру сопряжения ядра системы с датчиками и исполнительными механизмами объекта управления.
Врезультате этих структурных сдвигов объем трудозатрат на разработку аппаратурных средств изделия постоянно уменьшается по отношению к суммарным затратам на разработку и отладку прикладного программного обеспечения. Объем проектной документации на аппаратурные средства изделия постоянно уменьшается из-за все более широкого применения в аппаратуре сопряжения интегральных ЦАП, АЦП и интерфейсных БИС. Кроме того, во множестве конкретных применений для реализации ядра системы оказывается достаточно средств, содержащихся в единственной БИС микроконтроллера. Объем документации на программное обеспечение изделия имеет устойчивую тенденцию роста из-за стремления разработчиков использовать все более совершенные и , следовательно, более сложные алгоритмы управления. В этих условиях основным проектным документом на изделие становится листинг (распечатка исходного текста и машинных кодов) прикладной программы МК.
Таким образом, освященный традициями стереотип мышления, суть которого сводится к лозунгу «главное-это разработать аппаратуру, а программу потом «прилепим», оказывается не только неверным, но и гарантирует неудачу разработки. Появление однокристальных МК иллюстрирует тот факт, что все более сложные функциональные насыщенные части аппаратурных средств контроллеров в процессе интегрализации переходят из разряда подсистем в разряд комплектующих изделий. Так как эти комплектующие изделия являются сложно организованными приборами, функционирующими под управлением программ, то удельный вес прикладного программного обеспечения МКсис- тем имеет устойчивую тенденцию к увеличению, а удельный вес аппаратных средств- к снижению.
15.5 Особенности разработки прикладного программного обеспечения МК-систем
Как уже отмечалось, при проектировании МКсистем прежде всего возникает необходимость решения задачи оптимальном (по ряду критериев) распределении функций между аппаратурными средствами и программным обеспечением.
При этом в самом общем случае необходимо исходить из того, что использование специализированных интерфейсных БИС упрощает разработку и обеспечивает высокое быстродействие системы в целом, но сопряжено с увеличением стоимости, объема и потребляемой мощности. Большой удельный вес программного обеспечения позволяет сократить число компонентов системы и стоимость ее аппаратных средств, но это приводит к снижению быстродействия и увеличению затрат и сроков разработки и отладки прикладных программ. При этом еще может несколько увеличиться и число БИС внешней памяти МКсистемы. Решение о выборе того или иного варианта распределения функций между аппаратурными и программными средствами системы принимается в зависимости от тиражности изделия, ограничений по стоимости, объему, потребляемой мощности и быстродействию изделия. Попутно отметит, что время жизни изделия, в котором большая часть функций реализована в программном обеспечении, многократно возрастает за счет того, что срок «морального старения» изделия может быть существенно отодвинут. Программная реализация основных элементов алгоритма работы контроллера допускает его модификацию относительно простыми средствами ( путем перепрограммирования), в то время как возможность изменения уже существующей фиксации элементов алгоритма в аппаратуре контроллера практически отсутствует.
Опыт проектирования МКсистем свидетельствует, что имеет место неподготовленность значительной части потенциальных пользователей МК к переходу на принципиально новую элементную базу, отсутствие навыков программной реализации тех функций, которые в данной предметной области профессиональных знаний, в конкретной прикладной задаче традиционно выполнялись на основе аппаратурных средств. Отчасти такое положение объясняется отсутствием общей теории проектирования программируемых контроллеров, и это в свою очередь приводит к необходимости использовать программистов высокой квалификации для программирования и сопровождения простейших программ. Довольно распространенная практика работы “тандемом”, когда над разработкой прикладных программ для МК совместно работают профессиональный программист и непрограммирующий профессионал, то есть специалист, владеющий “тайнами ремесла” в конкретной предметной области, имеет серьезным недостатком то, что при попытках изложить программисту смысл прикладной задачи этот смысл зачастую ускользает. В результате такой практики формализуются и программируются наиболее очевидные, грубо говоря - тривиальные, прикладные задачи, а