

4. Силовой анализ плоских рычажных механизмов
Силы (моменты), действующие на звенья механизма, делят на движущие, развивающие положительную мощность, и сопротивления, развивающие отрицательную мощность, а так же на внутренние (реакции в кинематических парах) и внешние. К последним относят силы веса и силы (моменты) полезного сопротивления, для преодоления которых предназначен механизм.
Помимо перечисленных силовых факторов при силовом анализе механизмов вводят в рассмотрение так называемые уравновешивающие силы и моменты – такие условные внешние силы и моменты, которые, будучи приложенными к начальным звеньям, обеспечивают их движение по заданному закону.
Механизм – это неравновесная механическая система, так как в ней, как правило, нет ни одного подвижного звена, находящегося в состоянии покоя или равномерного прямолинейного движения. Но поскольку при силовом анализе механизмов предпочтительнее использовать приемы и уравнения статики, то к реальным, фактически действующим силам, искусственно добавляют инерционные силы и моменты, которые, согласно принципу Даламбера, любую систему сил дополняют до равновесной; эти силы и моменты также считают внешними.
|
|
|
Рис. 4.1 |
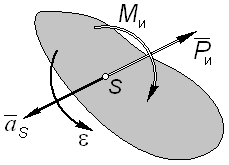
(рис. 4.1).
Величины инерционных нагрузок
![]() ;
;
![]() ;
(4.1)
;
(4.1)
здесь
m
– масса звена,
![]() –
момент инерции звена относительно его
центра массS.
–
момент инерции звена относительно его
центра массS.
Силовой анализ механизмов с учетом инерционных нагрузок называют кинетостатическим.
Целью силового анализа механизма является:
1. Определение сил взаимодействия звеньев (реакций в кинематических парах).
2. Определение уравновешивающих сил и моментов.
В данном пособии рассматриваем расчет без учета трения в кинематических парах.
Классическая задача силового анализа механизма обычно решается при таких исходных данных:
1) Кинематическая схема механизма.
2) Размеры и иные геометрические параметры звеньев.
3) Законы движения входных звеньев.
4) Массы и моменты инерции звеньев.
5) Силы и моменты полезных сопротивлений.
В дальнейшем будем считать, что к моменту начала силового расчета механизма выполнен его полный кинематический анализ и рассчитаны веса звеньев, их инерционные силы и моменты, а силы и моменты полезных сопротивлений заданы.
4.1. Характеристики реакций в кинематических парах
Вектор любой силы характеризуется точкой приложения, модулем (величиной) и направлением; вместо величины и направления нередко используют две составляющих этой силы по каким-либо выбранным направлениям.
Реакция в кинематической паре всегда действует в тех направлениях, в которых невозможно относительное движение звеньев.
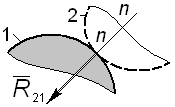
В плоских механизмах встречаются кинематические пары только IV и V классов (рис. 4.2 и 4.3). Очевидно, что реакции в таких парах характеризуются следующими сочетаниями известных и неизвестных величин:
пара IV класса – известны точка приложения и направление (действует вдоль контактной нормали), неизвестна только величина;
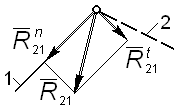
вращательная пара V класса – известна точка приложения, неизвестны направление и величина (или две составляющих по выбранным направлениям);
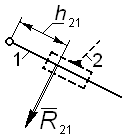
поступательная пара V класса – известно направление (перпендикулярно направляющей поступательного движения), неизвестны величина и положение точки приложения.
|
|
|
|
|
Пара IV класса |
Пары V класса | |
|
а) вращательная |
б) поступательная | |
|
Рис. 4.2
|
Рис. 4.3
| |
Таким образом, при силовом анализе пара IV класса характеризуется одной неизвестной величиной, любая пара V класса – двумя.