

Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования "Самарский государственный аэрокосмический университет имени академика С.П. Королева (национальный исследовательский университет)"
Факультет экономики и управления Кафедра «Математические методы в экономике»
Дисциплина «Теория оптимального управления»
Лекции «Принцип максимума Понтрягина»
Выполнила: студентка гр.751 К.А. Литвиненко
Самара 2011
Принцип максимума Понтрягина формулирует необходимое условие оптимальности управления для нелинейных динамических систем и является необходимым и достаточным условием оптимальности в случае линейных динамических систем.
Формализм принципа максимума Понтрягина (вывод необходимых условий оптимальности)
Постановка задачи оптимального управления:
Требуется найти оптимальное управление динамической системы из класса допустимых управлений, переводящее динамическую систему из заданного начального в конечное состояние за интервал времени Т= tk- to, при учете ограничений на фазовые переменные и управление, и обеспечивающее минимальное значение выбранного функционала.
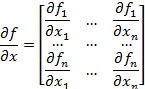
Рассмотрим динамическую систему, где х – n-мерный вектор.
![]() -
производная
-
производная![]()
Вводится дополнительная фазовая переменная таким образом, чтобы функционал был равен конечному значению фазовой переменной.
![]()
𝓘(u) называется функционалом функции u(t) на отрезке времени t∈[to;tk], если каждой функции u(t), принадлежащей некоторому классу функций, ставится в соответствие определенное число. Функционал является критерием качества задачи.
![]()
![]() - аргумент минимизации функционала
- аргумент минимизации функционала
![]()
Uopt(t)opt τ
-ε τ
U(t) ε T t
Игольчатая вариация
управления τ
T t }δ𝓘>0 t T τ
δx(τ) 𝓘min xopt(t) δ𝓘=δxn+1(T)>0












X(n+1)(t)
x(t)

для
t>τ![]()
![]()
Игольчатая вариация после ее приложения вызывает малые отклонения в поведении динамической системы от оптимального.
![]()
![]()
![]()
Введем дополнительный вектор (сопряженных переменных), размерность которого совпадает с размерностью вектора x.
![]()
Условия трансверсальности:


Продифференцируем первое условие
![]()
![]()


![]()
![]()
![]()
![]() – изменение сопряженных переменных
– изменение сопряженных переменных
![]()
![]()
![]()
![]()
![]()
Функция Гамильтона

![]()
Оптимальное управление в каждый момент времени должно обеспечивать максимальное значение функции Гамильтона. (необходимое условие оптимальности Понтрягина)
![]()
Постановка обобщенной задачи:
![]()
![]()
![]()
![]()

![]()
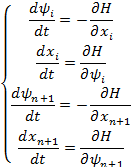
Каноническая система дифференциальных уравнений (2n+2)
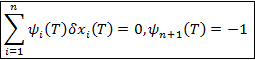
Требования к конечным значениям сопряженных переменных:
![]()
Свойства функции Гамильтона и поиск ее экстремума
Непрерывная функция времени
Функция Гамильтона при оптимальном управлении на оптимальной траектории является постоянной
![]()
Функция Гамильтона на оптимальной траектории при оптимальном управлении в случае нефиксированности конечного момента времени равна нулю
![]()
Если ограничения на управление отсутствуют, то оптимальное управление достигается в одной из стационарных точек функции Гамильтона
U H





Если ограничения на управление существуют, то наряду со стационарными точками необходимо проверить значения, которые принимает функция Гамильтона на границах
H U




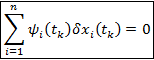
Типы граничных условий и виды краевых задач
1)
![]()
![]()
![]()
![]()
|
|
t0 |
tk |
|
|
xi(t0)=x0 |
|
|
|
xn+1(t0)=xn+1,0 |
|
|
|
|
𝜓i(tk)=0 |
|
|
|
|





Решение краевой задачи сводится к итерационной процедуре, основным элементом которой является задача Коши, и заключается в подборе недостающих (n+1) начальных условий для сопряженных переменных 𝜓 с целью, чтобы в конечный момент времени сопряженные переменные 𝜓 приняли заданные значения, вытекающие из условия трансверсальности.
2)
![]()
![]()
![]()
|
|
t0 |
tk |
|
|
xi(t0)=x0 |
xi(t0)=x0 |
|
|
xn+1(t0)=xn+1,0 |
|
|
|
|
|
|
|
|
|





3)
![]()
![]()
![]()
|
|
t0 |
tk |
|
|
xi(t0)=x0 |
xi(tk)=x1k |
|
|
…….. |
……. |
|
|
xn(t0)=xn0 |
xm(tk)=xmk |
|
|
xn+1(t0)=xn+1,0 |
|
|
|
|
𝜓m+1(tk)=0 |
|
|
|
......... |
|
|
|
𝜓n(tk)=0 |
|
|
|
|





