

Структура навигационных сигналов gps
Каждый GPS-спутник излучает на двух частотах (L1 и L2) специальный навигационный сигнал в виде фазоманипулированной псевдослучайной последовательности. В сигнале зашифровываются два вида кода. Один из них - код С/А (coarse/acquisition, или clear/acquisition) - доступен широкому кругу гражданских потребителей. Он позволяет получать лишь приблизительную оценку местоположения, поэтому называется "грубым" кодом. Передача кода С/А осуществляется на частоте L1 с использованием фазовой манипуляции псевдослучайной последовательности длиной 1023 символа. Защита от ошибок обеспечивается с помощью кода Гоулда. Период повторения С/А-кода - 1 мс. Тактовая частота - 1,023 МГц.
Другой код - P (precision code), обеспечивает более точное вычисление координат, но пользоваться им способны не все; доступ к нему ограничивается провайдером услуг GPS. В основном P-код предоставляется военным и федеральным службам США. Этот код передается на частоте L2 с применением сверхдлинной псевдослучайной последовательности с периодом повторения 267 дней. Тактовая частота - 10,23 МГц. Кроме этих кодов в сигнале GPS может присутствовать так называемый Y-код, являющийся шифрованной версией P-кода.
Кроме кодов С/А и P навигационный спутник регулярно передает специальное сообщение, которое содержит дополнительные сведения. Пользователь информируется о состоянии спутника и его параметрах - системном времени, эфемеридах (наборах параметров, точно описывающих орбиту движения навигационного спутника), прогнозе ионосферной задержки, показателях работоспособности. Передача навигационного сообщения длиной 1500 бит осуществляется со скоростью 50 бит/с на частотах L1 и/или L2.
Использование стандартных навигационных приемников gps/"Глонасс"
Координаты подвижного абонента определяются с помощью стандартного навигационного GPS- или GPS/"Глонасс"-приемника ( рисунок 1 ), встроенного в терминал пользователя. Устройство, как правило, использует собственную миниатюрную антенну и автономно вычисляет географические координаты и всемирное время (UTC) по навигационным сигналам. В отдельных случаях навигационная антенна совмещается со связной антенной абонентского терминала (например, в системе Inmarsat-C), а прием навигационных данных может осуществляться как в обслуживаемом, так и в необслуживаемом режимах его работы.
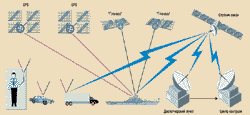
Рисунок 1. Схема определения координат объекта в системах спутниковой связи с использованием GPS/"Глоннас"-приемников
GPS/"Глонасс"-приемники чаще всего применяются, если необходимо получить высокую точность координат (погрешность не более 100 м). Захватив сигнал, навигационный приемник автоматически вычисляет координаты объекта, скорость сигнала и всемирное время и формирует отчет. Сведения о местонахождении объекта передаются по спутниковым каналам связи в диспетчерский пункт.
Навигационные устройства могут различаться по количеству каналов приема, скорости обновления данных, времени вычислений, точности и надежности определения координат. Современные GPS-устройства обычно оснащены 6-8 приемниками, что позволяет отслеживать практически все навигационные спутники, находящиеся в зоне радиовидимости объекта. Если каналов меньше, чем "наблюдаемых" спутников, автоматически выбирается наиболее оптимальное сочетание КА. Скорость обновления навигационных данных - 1 с. Время обнаружения зависит от числа одновременно наблюдаемых спутников и режима определения местоположения.
Определение навигационных параметров может производиться в двух режимах - 2D (двумерном) и 3D (пространственном). В режиме 2D устанавливается широта и долгота (высота считается известной); для этого достаточно присутствия в зоне радиовидимости трех спутников. Время определения координат в режиме 2D обычно не превышает 2 мин. Для определения пространственных координат абонента (режим 3D) требуется, чтобы в соответствующей зоне находились не менее четырех КА. Гарантируются время обнаружения не более 3-4 мин и погрешность вычисления координат не более 100 м. Комбинированные GPS/"Глонасс"-приемники с обобщенным алгоритмом определения местоположения даже при использовании стандартного С/А-кода обеспечивают более высокую точность (15-20 м).
Навигационный приемник сигналов для системы GPS состоит из приемного модуля и малогабаритной антенны с малошумящим усилителем. Приемный модуль выпускается как в виде автономного устройства со встроенными источниками питания, так и в виде отдельной платы, встраиваемой в абонентский терминал. К сожалению, массовый выпуск малогабаритных и относительно дешевых приемников "Глонасс" пока не налажен, поэтому услугой определения местонахождения с помощью этих приемников пользуются преимущественно российские потребители, да и то лишь в системах специального назначения.
На степень точности вычисления координат влияет ряд факторов, зависящих от процедуры их определения. Эти факторы принято называть факторами снижения точности. Как правило, при вычислении координат применяются следующие стандартные факторы снижения точности:
геометрический фактор снижения точности (GDOP) говорит о степени влияния погрешностей псевдодальности (последняя характеризует меру удаленности потребителя от GPS-спутника) показаний часов на точность вычисления координат. Зависит от положения спутника относительно GPS-приемника и от смещения показания GPS-часов. Различие значений псевдодальности и фактической дальности связано со смещением показаний часов GPS-спутника и потребителя, а также с задержками распространения и другими ошибками.
горизонтальный фактор снижения точности (HDOP) показывает степень влияния точности определения горизонтали на погрешность вычисления координат;
фактор снижения точности определения положения (PDOP) - это безразмерный показатель, который описывает, как влияет на точность определения координат погрешность псевдодальности;
относительный фактор снижения точности (RDOP) по сути равен фактору снижения точности, нормализованному на период, составляющий 60 с;
временной фактор снижения точности (TDOP) описывает степень влияния погрешности показаний часов на точность определения координат;
вертикальный фактор снижения точности (VDOP) показывает степень влияния погрешности в вертикальной плоскости на точность определения координат.
Основными источниками ошибок, влияющими на точность навигационных вычислений, являются следующие.
Погрешности, обусловленные режимом селективного доступа (Selective availability, S/A). Реализуя этот режим, провайдер услуг GPS (Министерство обороны США) намеренно снижает точность определения местонахождения для гражданских потребителей. В режиме S/A формируются ошибки искусственного происхождения, вносимые в сигнал на борту GPS-спутников с целью загрубления навигационных измерений. Такими ошибками являются неверные данные об орбите спутника и искажения показаний его часов за счет внесения добавочного псевдослучайного сигнала. Величина среднеквадратической ошибки из-за влияния этого фактора составляет примерно 30 м.
Погрешности, связанные с распространением радиоволн в ионосфере. Задержки распространения сигналов при их прохождении через верхние слои атмосферы приводят к ошибкам порядка 20-30 м днем и 3-6 м ночью. Несмотря на то, что навигационное сообщение, передаваемое с борта GPS-спутника, содержит параметры модели ионосферы, компенсация фактической задержки в лучшем случае составляет 50%. Компенсировать ошибки, вызванные ионосферной рефракцией, можно при использовании для навигации сигналов, принимаемых на двух разных частотах.
Погрешности, обусловленные распространением радиоволн в тропосфере. Возникают при прохождении радиоволн через нижние слои атмосферы. Значения погрешностей этого вида при использовании сигналов с С/А-кодом не превышают 30 м.
Эфемеридная погрешность. Ошибки обусловлены расхождением между фактическим положением GPS-спутника и его расчетным положением, которое устанавливается по данным навигационного сигнала, передаваемого с борта КА. Значение погрешности обычно не больше 3 м.
Погрешность ухода шкалы времени спутника обусловлена расхождением шкал времени различных спутников. Устраняется с помощью наземных станций слежения или за счет компенсации ухода шкалы времени в дифференциальном режиме определения местоположения.
Погрешность определения расстояния до спутника. Данный показатель является статистическим, он вычисляется для конкретного спутника и заданного интервала времени. Ошибка не коррелирована с другими видами погрешностей. Ее величина обычно не превышает 10 м.