

Введение
Гиростабилизатор — гироскопическое устройство, предназначенное для стабилизации отдельных объектов или приборов, а также для определения угловых отклонений объектов. По принципу действия гиростабилизаторы делятся на непосредственные, силовые и индикаторные.
Гиростабилизированная платформа обычно состоит из 1, 2 или 3 гироскопов, электронной системы обработки сигналов. Также может содержать акселерометры и другие датчики.
Гиростабилизированные платформы, как измерительный прибор, обычно используются в составе системы управления ракетами, космическими кораблями и орбитальными станциями, самолётами, морскими судами, подводными лодками и т. п.
Также гиростабилизированые платформы применяются в системах видеонаблюдения на базе БПЛА и аэростатов.
Построение функционально-кинематической схемы
Система состоит из платформы на которой расположены трехстепенной гироскоп типа МГТУ и оптический прибор, функционально-кинематическая схема которой представлена на рис.1.
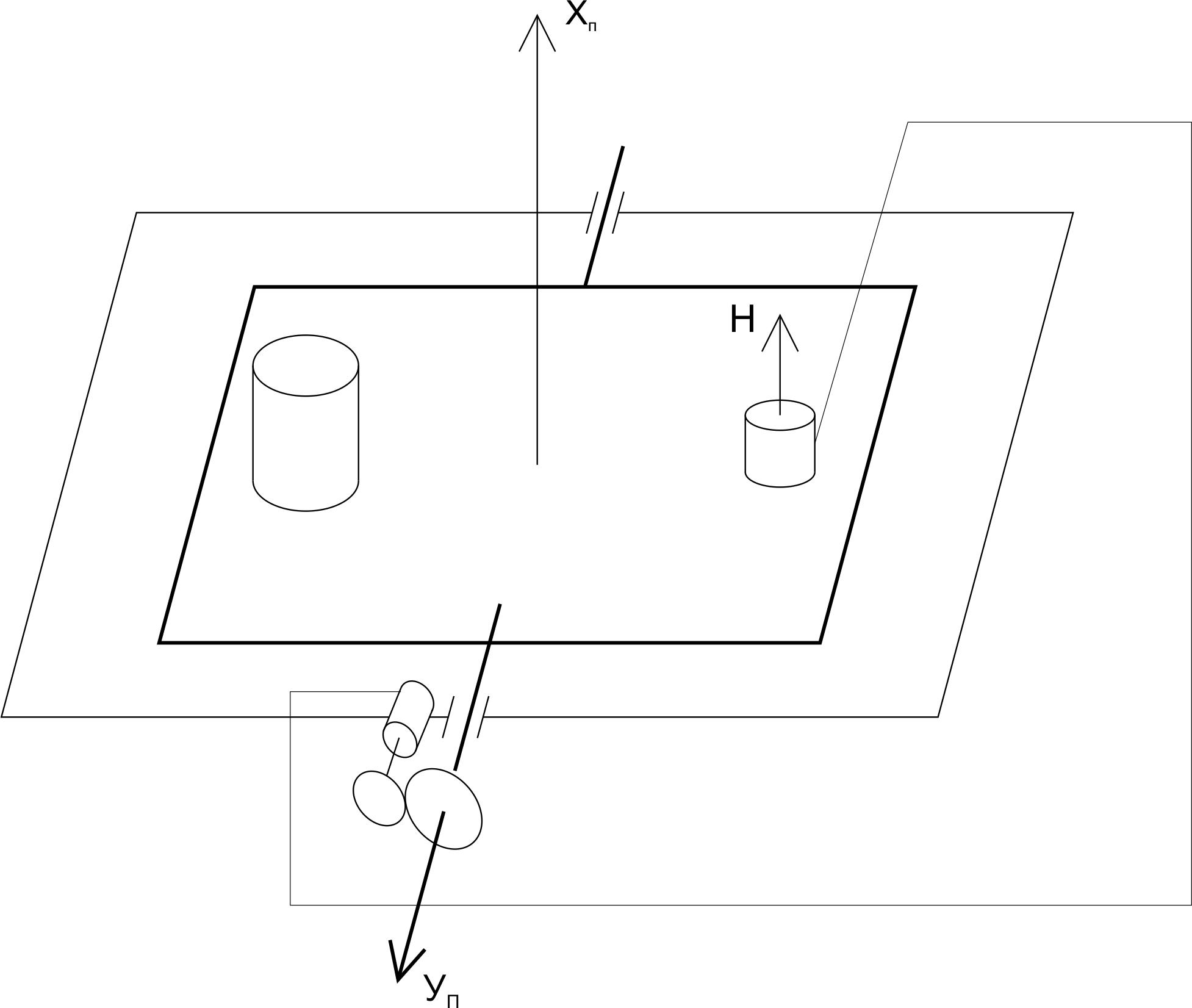
Рис.1. функционально-кинематическая схема САС
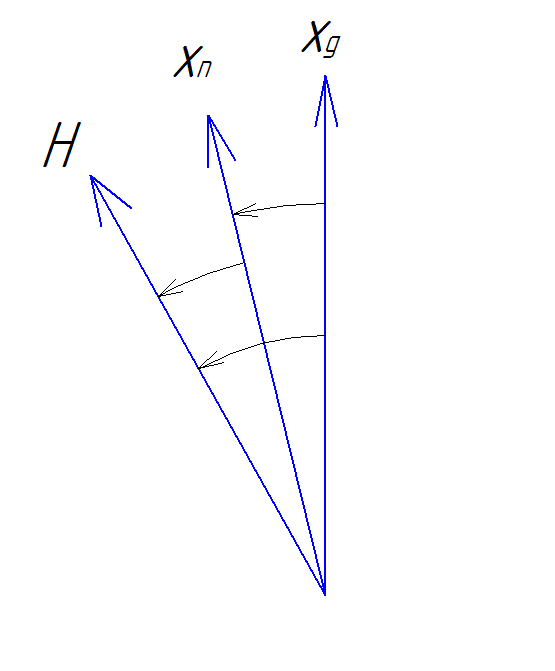
Расположение интересующих нас осей представлена на Рис.2.
α
β
![]()
![]()
Рис.2.Расположение осей
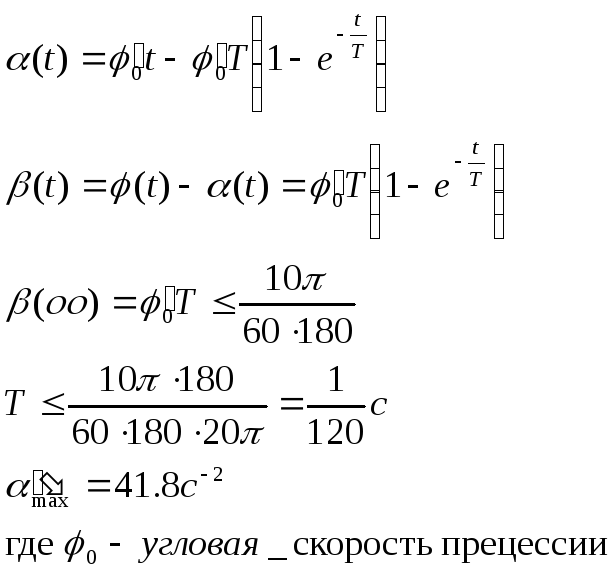
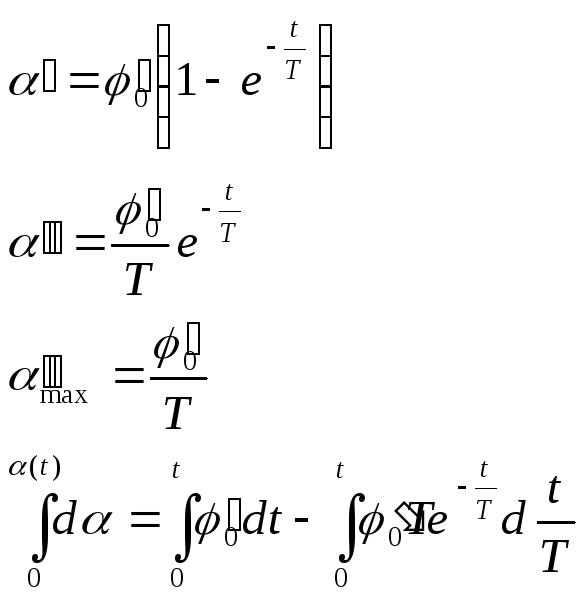
По принципу Даламбера находим максимальный момент стабилизирующего мотора:
Выбор исполнительного двигателя
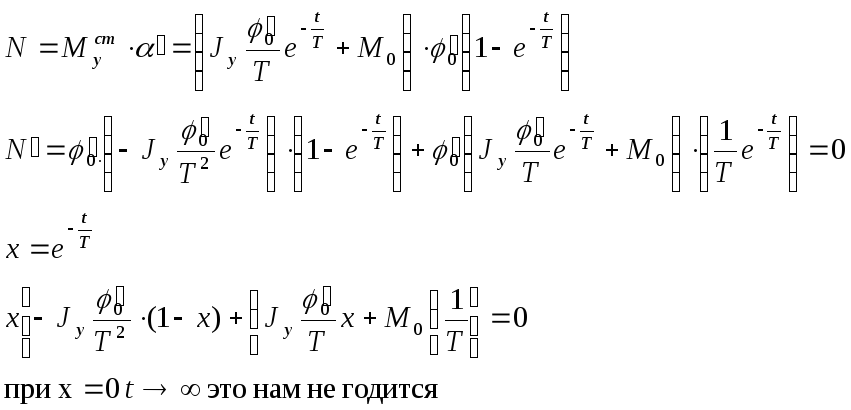
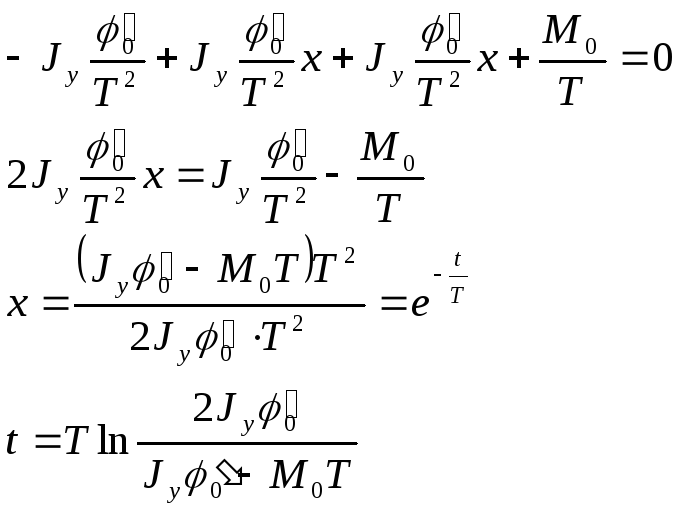
Исполнительный двигатель выбираем по мощности:
 (1)
(1)
находим х и t:
 (2)
(2)
В данном варианте задания допускаемая мощность N=0.3. С целью уменьшения передаточного числа редуктора, берем двигатель большей мощности (ДПР-42).
Параметры двигателя ДПР-42: Таблица 1
|
Номинальные данные |
Хол. ход |
Пусковой режим |
Срок службы | ||||
|
UH |
MH |
nH |
IH |
I0 |
Mп |
Iп | |
|
в |
г*см |
об/мин |
а |
а |
г*см |
а |
ч |
|
27 |
50 |
9000 |
0,29 |
0,08 |
360 |
3 |
500 |
Ja=0,0057 г*см*с2 – момент инерции якоря
Те=0,25 – 0,5 мсек – электромагнитная постоянная цепи якоря
Вывод и линеаризация уравнений движения сас, расчет коэффициентов уравнений
Д ля
расчета необходимо знать уравнения
корректирующего мотора, изобразим его
типовую электрическую схему:
ля
расчета необходимо знать уравнения
корректирующего мотора, изобразим его
типовую электрическую схему:
Технические уравнения, без учета демпфирующего момента и момента трения, будут иметь следующий вид:
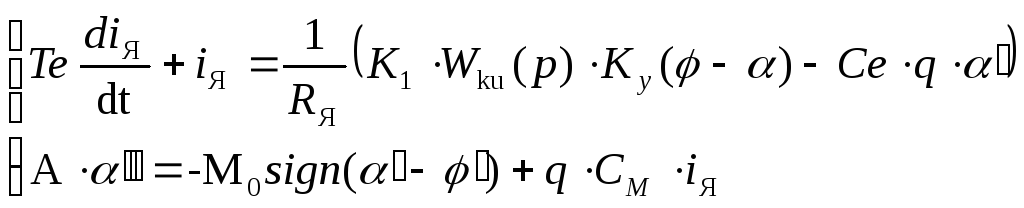 (3)
(3)
где К1 – коэффициент усиления датчика
Ку – коэф. усиления усилителя
q – передаточное число редуктора
Wku – передаточная функция корректирующего звена
Для
простоты расчетов ![]() приравняем к 0
приравняем к 0
Воспользуемся паспортными данными двигателя для расчета некоторых коэффициентов уравнения движения:

![]()
Построение структурной схемы и расчет основных параметров сас
В соответствии с уравнениями системы (3) построим структурную схему модели
X α Uy α´ α´ α
Рис.4. Структурная схема модели САС
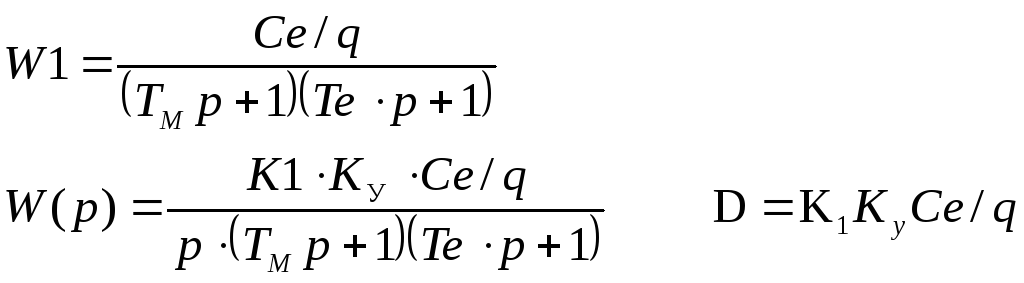
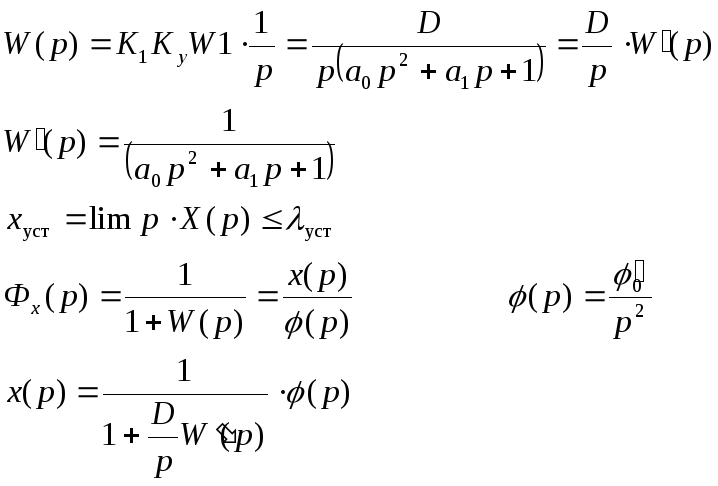 (4)
(4)
найдем добротность системы, исходя из тех. условий
 (5)
(5)
D – добротность системы
![]() ,α,х
– входная, выходная величины и ошибка
регулирования
,α,х
– входная, выходная величины и ошибка
регулирования

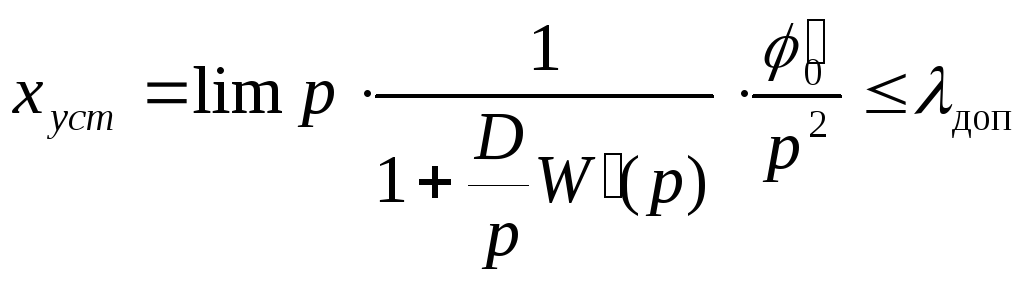
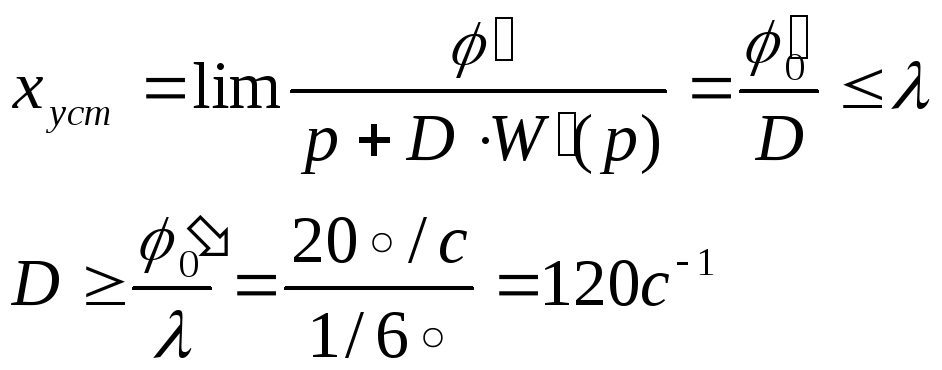
так
как
![]() ,
выполняется следующее:
,
выполняется следующее:
 (6)
(6)