

Вопрос №52 2014
.docxСуммарная инерционная девиация ГК с автономным ЧЭ.
В современных ГК класса “Standart” имеется масляный успокоитель, поэтому при маневрировании возникает суммарная инерционная девиация. Для уменьшения инерционной девиации используются математические модели, за счет которых девиация может быть уменьшена в несколько раз.
Требования ИМО к точности ГК в условиях маневрирования судна.
На широтах до 60°: Остаточная постоянная ошибка не > ±0,25°*секанс широты; Ошибка, вызванная быстрым изменением скорости (с 20уз), не > ±2°; Ошибка, вызванная быстрым изменением курса на 180° (при 20 уз), не > ±3°; Неустановившиеся и постоянные ошибки, от бортовой и килевой гармонической качки с периодом колебаний от 6 до 15 с, амплитудами 20, 10 и 5° соответственно, при максимальном горизонтальном ускорении, не > 1 м/с², и рысканием судна, должны быть не > 1°*секанс широты.
На широтах до 70° СШ или ЮШ в пределах полосы широт 10°: остаточная постоянная ошибка не > ±0,25* х секанс шпроты; максимальная ошибка, вызванная быстрым изменением V не > ±2°; ошибка, вызванная быстрым изменением курса на 180° при максимальной угловой скорости поворота 20°/с и скорости 70 узлов, не > ±3°; неустановившиеся и постоянные ошибки, вызванные бортовой и килевой качкой и рысканием судна с периодом простых гармоничных колебаний от 6 до 15 с, амплитудами 20°, 10° и 5° соответственно, при максимальном горизонтальном ускорении не более 1 м/с², на любом курсе, особенно при 45°, 90° и 315°, не должны превышать ±1° * секанс широты. При всех условиях окружающей среды, ошибка не > ±1°. При всех условиях эксплуатации максимальное расхождение в отсчетах между показаниями основного прибора и оборудования управления рулем и визуального пеленгования не > ±0,5°. Скорость отработки системы передачи курса должна быть не менее 20°/с.
Накопление суммарной инерционной девиации.
Если судно совершает повторные маневры и время между ними невелико, то девиация от первого и второго маневра может суммироваться. Академик Крылов доказал что это время равно половине периода затухающих колебаний гирокомпаса в данной широте места. Соответственно следует избегать таких маневров.
Использование математических моделей для цели снижения инерционных девиаций. Идея состоит в том, что в микропроцессорах заложены дифференциальные уравнения , описывающие движение ЧЭ при маневрировании судна. Данные диф.уравнения и являются мат.моделью. Микропроцессор дискретно рассчитывает суммарную инерционную девиацию, которая затем исключается из показаний репитеров.
В ГК “Standart-20” заложена мат.модель 3 порядка:
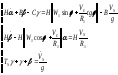
Третье уравнение описывает перетекание жидкости из северного сосуда в южный. На заводе изготовителе каждый ЧЭ проходит тестирование, при котором определяется Н,В,С, W3 , R3.
 VN
– поступит
от лага или GPS.
VN
– поступит
от лага или GPS.
VN – определяется путем дифференцирования скорости.
Н – горизонтная составляющая
TN – постоянная времени гидравлического успокоителя.
В результате будет рассчитано модельное значение инерционной девиации.