

Вопрос №8
.docВопрос №8.
Расчёт координат места судна аналитическим способом при избыточном числе линий положения. Метод наименьших квадратов, ковариационные матрицы погрешностей измерений и погрешностей координат, понятие геометрического фактора. Априорная и апостериорная оценка точности обсервации.
Основные сведения о методе наименьших квадратов
Число навигационных измерений, используемых для определения места судна, очень существенно. Если измеряются два навигационных параметра и решается задача определения ∆φ и ∆λ, то говорят, что в задаче отсутствует избыточность, т. е. система линейных уравнений линий положения совместна и практически всегда имеет решение. Исключение составляют параллельные линии положения.
С математической точки зрения гарантия решения системы уравнений, несомненно, является положительным качеством, но хорошо ли это с позиций навигации? Конечно, нет. Отсутствие избыточности измерений приводит к неконтролируемости влияния различных видов погрешностей на результат, и особенно опасны грубые промахи и систематические погрешности. Поэтому в этих целях, а также для повышения точности обсервации используют избыточное число измерений. Так, в случае оценки приращений координат ∆φ и ∆λ на плоскости минимально могут быть измерены три навигационных параметра, т. е. n = 3. В этой ситуации избыточность равна единице. Система уравнений линий положения будет иметь вид:

В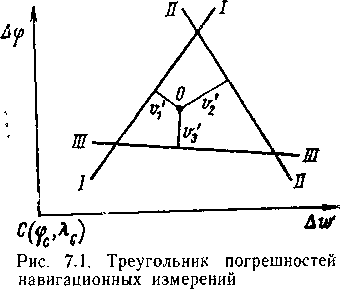 озможно
ли традиционное решение такой системы?
Из-за наличия погрешностей измерений
линии положения образуют фигуру
погрешностей — треугольник (рис. 7.1),
поэтому решение любых двух уравнений
из трех даст нам положение вершин
этого треугольника погрешностей
относительно начала координат. Это
означает, что решение любой пары уравнений
не обращает в тождество оставшееся
уравнение. Такая система несовместна,
т. е. решение любой пары несовместно с
третьим уравнением. Какова же польза
от такой избыточности, если уже на
начальном этапе возникают трудности в
поиске решения? Анализ размеров фигуры
погрешностей и ее поведение в
последовательности измерении дают
полезные сведения о качестве измерительной
навигационной информации.
озможно
ли традиционное решение такой системы?
Из-за наличия погрешностей измерений
линии положения образуют фигуру
погрешностей — треугольник (рис. 7.1),
поэтому решение любых двух уравнений
из трех даст нам положение вершин
этого треугольника погрешностей
относительно начала координат. Это
означает, что решение любой пары уравнений
не обращает в тождество оставшееся
уравнение. Такая система несовместна,
т. е. решение любой пары несовместно с
третьим уравнением. Какова же польза
от такой избыточности, если уже на
начальном этапе возникают трудности в
поиске решения? Анализ размеров фигуры
погрешностей и ее поведение в
последовательности измерении дают
полезные сведения о качестве измерительной
навигационной информации.
Для того чтобы все же получить согласованное решение, необходимо ввести дополнительные условия, которые можно получить, если более детально представить систему (7.1). Другими словами, в окрестности фигуры погрешностей необходимо выбрать точку (предполагаемое решение), относительно которой и можно было бы сформулировать дополнительное условие.
Рис. 7.1 дает представление о фигуре погрешностей при n = 3. Здесь отрезки v'1, v'2, v'3 называются невязками. В специальной литературе также встречается термин поправка или ошибка линии положения в зависимости от знака. Собственно в такой ситуации именно невязки и определяют решение относительно фигуры погрешностей. Множество возможных сочетаний невязок определяет множество решений, и задача заключается в подборе наиболее простого и физически интерпретируемого условия. Если обозначить ∆Ui=Uo — Uc=—Li, то с учетом невязок систему (7.1) можно записать так:

Здесь величины v1, v2, v3 — невязки, выраженные в единицах измерений, что более удобно для дальнейших выкладок. Для согласования системы (7.2) с рис. 7.1 необходимо выразить невязки v1 в линейных единицах, т. е. разделить все члены на модули соответствующих градиентов:

Теперь становится очевидным, что избыточная система (7.1) превратилась в системы (7.2) — (7.2а) с недостаточным числом уравнений, так как невязки также неизвестны. Формально наиболее простое решение такой системы можно получить, если принять следующее условие:
![]()
Если невязки выражены в линейных единицах, то условие (7.3) запишется таким образом:
![]()
При увеличении числа измерений (n>3) возникает более сложная фигура погрешностей с числом вершин C2n = n(n—l)/2, но условие (7.3) дает однозначное решение системы уравнений линий положения при любом значении n. Его суть сводится к поиску «центра тяжести» фигуры погрешностей измерений, т. е. к определению некоторого среднего значения координат из множества координат вершин фигуры.
Для того чтобы почувствовать это среднее, сконструируем из трех линий положения следующую фигуру погрешностей. Пусть две линии положения из трех параллельны (рис. 7.2). Эта конфигурация противоречит хорошей морской практике, но зато удобна для анализа. В такой ситуации естественно считать, что место судна находится где-то на третьей линии положения. Воспользуемся критерием, рассчитанным по формуле (7.3а). В результате получим, что минимуму критерия S соответствует середина отрезка линии положения ///, заключенного между прямыми / и //. Решение системы уравнений называется оптимальным в смысле выполнения условия S = min, т. е. при выполнении критерия минимума суммы квадратов невязок. Избыточность позволяет нам получить информацию о некоторых средних значениях координат, а поэтому важным является утверждение, что оптимальная точка будет всегда находиться внутри фигуры погрешностей, если систематические погрешности δj = 0. Метод наименьших квадратов является наиболее универсальным средством обработки избыточной навигационной информации. Его основы были разработаны Лежандром и Гауссом в период с 1795 по 1805 г.
Р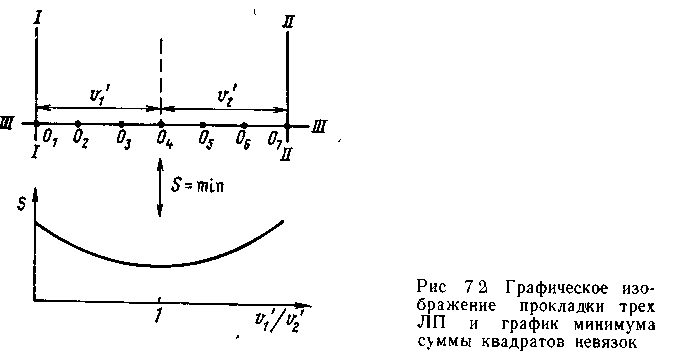 азличные
модификации метода используются
в настоящее время для решения многих
навигационных задач:
-комплексирование
навигационной информации
-вычисление
коэффициентов девиации и радиодевиации
-определение коэффициентов дрейфа,
точности счисления и т. п.
азличные
модификации метода используются
в настоящее время для решения многих
навигационных задач:
-комплексирование
навигационной информации
-вычисление
коэффициентов девиации и радиодевиации
-определение коэффициентов дрейфа,
точности счисления и т. п.
Для более удобного изложения дальнейшего материала воспользуемся методами линейной алгебры, что позволит сократить и унифицировать записи. Обозначим матрицей А таблицу коэффициентов при неизвестных в системе (7.2), не ограничиваясь размерностью n.

Введем следующие матрицы:
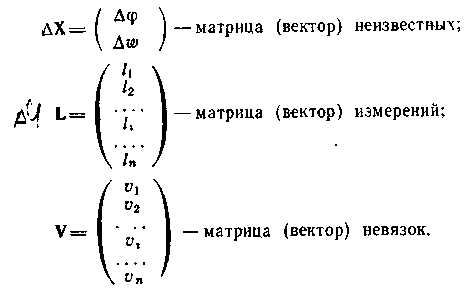
Теперь система (7.2) запишется более компактно:
![]()
Запишем в развернутой форме формулу (7.5), выполнив умножение А на ∆Х, и получим знакомую систему (7.2). Размерности векторов ∆Х и L, т. е. величины k и n, формально не имеют значения, и совершенно аналогичная по своей структуре линейная система может быть составлена, если в вектор ∆Х, на пример, включить систематическую погрешность измерения навигационного параметра:
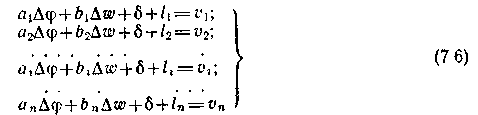
Здесь предполагается, что систематическая погрешность одинакова для всех n измерений.
Для системы (7.6) матрицы А и ∆Х из системы (7.5) запишем так:
Для удобства записи в плоской задаче примем следующие обозначения: х = ∆φ и y = ∆ω