

Вопрос №5
.docВопрос №5.
Навигационные функции, навигационные параметры и навигационные изолинии, получаемые при измерениях: пеленга, расстояния, разности расстояний, горизонтального угла. Градиенты навигационных функций.
Навигационными параметрами называются - измеряемые для определения места судна направления и расстояния или их производные (углы, разность расстояний) до объектов с известными координатами.
Навигационной изолинией называется - геометрическое место точек, отвечающее постоянному значению навигационного параметра.
В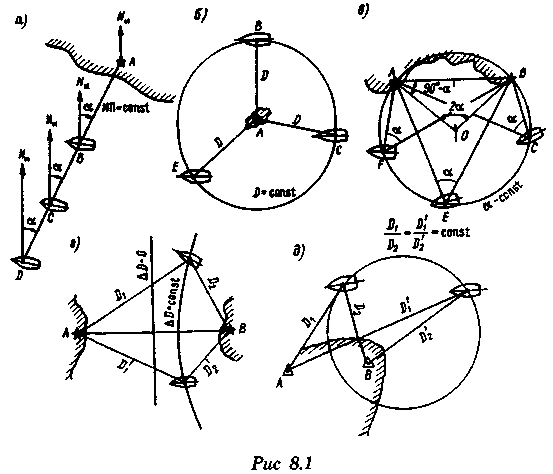 навигации для определения места
судна используются следующие навигационные
параметры и соответствующие им изолинии.
навигации для определения места
судна используются следующие навигационные
параметры и соответствующие им изолинии.
Пеленг. На судне измерен истинный пеленг (ИП) предмета А (рис. 8.1, а), равный α. Проложив на карте линию пеленга AD, можно утверждать, что судно в момент взятия пеленга находилось на этой линии, так как в противном случае значение пеленга было бы отличным от измеренного. Однако неизвестно, в какой точке (В, С, D) на линии пеленга находится судно. Прямая линия AD, отвечающая условию ИП = α, на которой находилось судно в момент наблюдения, будет называться изолинией пеленга или изопеленгой (изоазимутой на сфере).
Расстояние. Измерено расстояние D между судном и ориентиром А (рис. 8.1, б). В этом случае судно будет находиться на окружности радиусом D с центром в точке А. Эта окружность будет называться изолинией расстояния или изостадией.
Горизонтальный угол. Если измерен горизонтальный угол между предметами А и В (рис.8.1, в) равный α, или этот угол вычислен как разность двух пеленгов α = ИП2 – ИП1, то вершина горизонтального угла будет лежать на окружности, проходящей через точки А и B, а центр окружности О будет находиться на перпендикуляре к линии АВ в точке его пересечения с линией, проведенной под углом 90°- α к линии AB (рис. 8.1, в). Эта окружность называется изолинией горизонтального угла α или изогоной.
Разность расстояний. В некоторых радионавигационных системах измеряется разность расстояний до двух ориентиров. Тогда изолинией разности расстояний будет гипербола (рис. 8.1, г).
Можно представить и другие виды изолиний. Например, если измерить отношение расстояний до двух ориентиров, то изолинией равных отношений расстояний будет окружность Аполлония (рис. 8.1, д).
Если координаты точки получены без ввода элементов счисления пути судна, то они называются обсер-вованными (φ0, λ0). Если при определении места использовались элементы счисления (курс и скорость), то такие определения называют счислимо-обсервованными.
На сравнительно небольших расстояниях, например при визуальных определениях места судна, изолинии прокладываются непосредственно на карте (выполняется графическое решение). При больших расстояниях, когда необходимо учитывать сфероидичность Земли, непосредственная прокладка изолиний на карте становится затруднительной. В этом случае отрезок изолинии заменяется прямой линией.
Профессор В. В. Каврайский дал этому методу более широкое теоретическое обобщение, введя термин «линия положения» для касательной или секущей к изолинии в небольшой области.
Линией положения называется прямая, заменяющая участок навигационной изолинии вблизи счислимого места судна.
Обобщенная теория линий положения позволила расширить методы получения обсервованных координат, которые можно подразделить на три группы:
-графические (использование карт с сетками изолиний и непосредственная прокладка изолиний); -графоаналитические (обобщенный метод линий положения и использование специальных таблиц определяющих точек для построения линий положения); -аналитические (прямые алгебраические методы решения уравнений и численные с использованием метода хорд или касательных).
Градиенты навигационных параметров. Смещение изолиний
Любые измерения содержат ошибки, поэтому измерив пеленг, дистанцию или угол и проложив на карте соответствующую изолинию, нельзя считать, что судно будет находиться на этой изолинии. Вычислить возможное смещение изолинии из-за ошибок наблюдений можно, используя понятие градиента функции.
И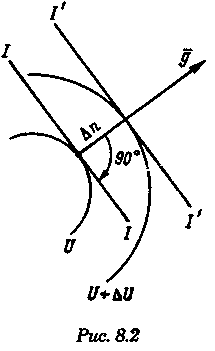 зобразим
две изолинии, соответствующие значениям
навигационных параметров U и U + ∆U
(рис. 8.2). На всей изолинии значение
функции навигационного параметра
остается постоянным, но оно изменится
при переходе на другую изолинию. Чем
теснее расположены изолинии друг к
другу, тем меньше расстояние ∆n
между ними при заданном приращении
функции ∆U,
тем быстрее меняется функция в данном
районе. Это изменение удобно характеризовать
отношением ∆U/∆n
или вектором g, направленным в сторону
возрастания функции по нормали к
изолинии. Вектор g называется
градиентом. Таким образом, градиентом
навигационного параметра называется
вектор, направленный по нормали к
навигационной изолинии в сторону ее
смещения при положительном приращении
параметра, причем модуль этого вектора
характеризует наибольшую скорость
изменения параметра в данном месте.
Этот модуль равен
зобразим
две изолинии, соответствующие значениям
навигационных параметров U и U + ∆U
(рис. 8.2). На всей изолинии значение
функции навигационного параметра
остается постоянным, но оно изменится
при переходе на другую изолинию. Чем
теснее расположены изолинии друг к
другу, тем меньше расстояние ∆n
между ними при заданном приращении
функции ∆U,
тем быстрее меняется функция в данном
районе. Это изменение удобно характеризовать
отношением ∆U/∆n
или вектором g, направленным в сторону
возрастания функции по нормали к
изолинии. Вектор g называется
градиентом. Таким образом, градиентом
навигационного параметра называется
вектор, направленный по нормали к
навигационной изолинии в сторону ее
смещения при положительном приращении
параметра, причем модуль этого вектора
характеризует наибольшую скорость
изменения параметра в данном месте.
Этот модуль равен
![]()
Размерность модуля градиента равна размерности параметра U на линейную величину. Направления вектора градиента и линии положения взаимно перпендикулярны, обозначается направление градиента символом r.
Если при измерении навигационного параметра U допущена ошибка ∆U и известен градиент, то смещение линии положения параллельно самой себе определяется формулой
![]()
Чем больше величина градиента g, тем меньше смещение линии положения при той же ошибке ∆U, тем точнее будет определение места судна.
П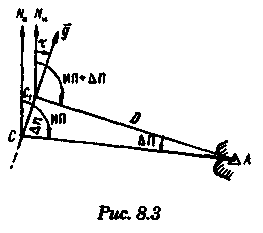 еленг.
Предположим, что наблюдатель, находившийся
в точке С, переместился так, что пеленг
получил приращение ∆П,
град. (рис. 8.3). Следовательно, ∆U
=
∆П.
Из треугольника .АСС1
имеем
еленг.
Предположим, что наблюдатель, находившийся
в точке С, переместился так, что пеленг
получил приращение ∆П,
град. (рис. 8.3). Следовательно, ∆U
=
∆П.
Из треугольника .АСС1
имеем
![]()
Значение модуля градиента тогда равно, град, /миля,
![]()
Н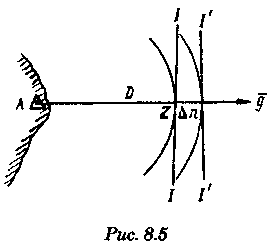 аправление
градиента
т = ИП - 90°.
аправление
градиента
т = ИП - 90°.
Расстояние. При измерении расстояния ∆U = ∆D, смещение изолинии ∆n = ∆D.
Следовательно,
![]()
б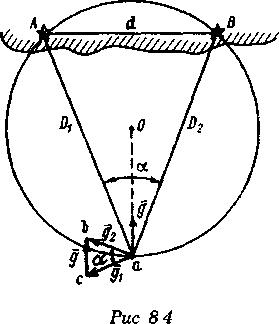 удет
совпадать с направлением из ориентира
А на точку Z, в которой находится судно
(рис. 8.4). Смещение линии положения,
полученной по измеренному расстоянию,
зависит только от ошибки в измеренном
расстоянии.
удет
совпадать с направлением из ориентира
А на точку Z, в которой находится судно
(рис. 8.4). Смещение линии положения,
полученной по измеренному расстоянию,
зависит только от ошибки в измеренном
расстоянии.
Г![]() оризонтальный
угол.
Значение модуля градиента можно получить,
предварительно вычислив значение
градиента функции, если рассмотреть
угол как разность двух направлений
(пеленгов) и использовать теорему о
том, что градиент разности двух
функций равен геометрической разности
градиентов этих функций. На рис. 8.4 вектор
cb представляет_геометрическую разность
двух векторов градиентов направлений
аЬ и ас, т. е. g = gl –g2, где g — градиент
горизонтального угла α.
оризонтальный
угол.
Значение модуля градиента можно получить,
предварительно вычислив значение
градиента функции, если рассмотреть
угол как разность двух направлений
(пеленгов) и использовать теорему о
том, что градиент разности двух
функций равен геометрической разности
градиентов этих функций. На рис. 8.4 вектор
cb представляет_геометрическую разность
двух векторов градиентов направлений
аЬ и ас, т. е. g = gl –g2, где g — градиент
горизонтального угла α.
Модуль градиента определяется из ∆асЬ:
П![]() одставляя
значения градиентов
одставляя
значения градиентов
![]()
где d — расстояние между ориентирами А и В. Направлен градиент по нормали к изолинии (окружности) в сторону возрастания угла α, т. е. к центру окружности.
![]()
А![]() налитически
r
вычисляется по формуле где δ —
вспомогательный угол.
налитически
r
вычисляется по формуле где δ —
вспомогательный угол.
Значение угла δ получается вычислением
Смещение линии положения в милях равно
![]() где
m’a
— погрешность угла в дуговых минутах.
где
m’a
— погрешность угла в дуговых минутах.
Р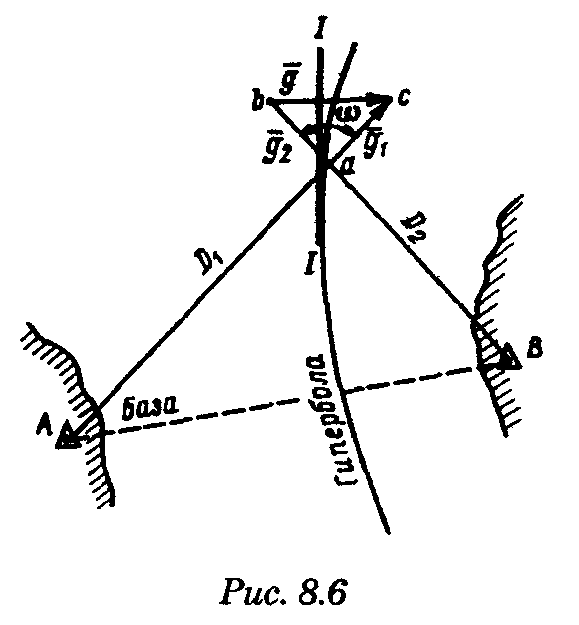 азность
расстояний.
Для получения градиента разности
расстояний рассмотрим треугольник
градиентов аЬс (рис. 8.6). В нем вектор
азность
расстояний.
Для получения градиента разности
расстояний рассмотрим треугольник
градиентов аЬс (рис. 8.6). В нем вектор
ас = g1 — градиент расстояния D1 вектор ah = g2 — градиент расстояния D2. Треугольник обе — равнобедренный, так как gt = g2 = 1.
Модуль
градиента разности расстояний равен g
= g1-g2,
или из треугольника abc.![]()
где
ω — базовый угол, или разность азимутов
на станции А и В. Направление градиента
разности расстояний совпадает с нормалью
к гиперболе в точке α и перпендикулярно
биссектрисе угла ω в сторону увеличения
навигационного параметра. Направление
биссектрисы равно![]()
Следовательно,![]()
Смещение линии положения в общем виде равно
![]() (8.8)
(8.8)
Для получения ∆п в милях каждая РНС («Декка», «Омега», «Лоран») имеет переходный коэффициент для пересчета единицы радионавигационного параметра в мили.