

Билет №43
.docxБ И Л Е Т № 43
1. Законы частотного регулирования скорости асинхронных электроприводов.
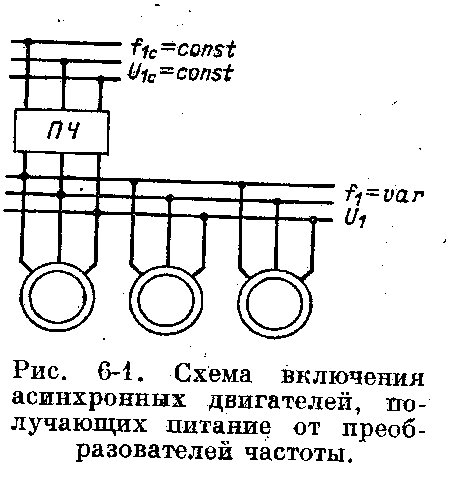
Применение частотного регулирования скорости значительно расширяет возможности использования асинхронных электроприводов в различных отраслях промышленности. В первую очередь это относится к установкам, где производится одновременное изменение скорости нескольких асинхронных двигателей, приводящих в движение, например, группы текстильных машин, конвейеров, рольгангов и т. п. Используется частотный принцип регулирования скорости асинхронных двигателей и в индивидуальных установках, особенно в тех случаях, когда необходимо получить от механизма высокие угловые скорости, например, для центрифуг, шлифовальных станков и т. д. Питание асинхронных двигателей осуществляется при этом не от общей сети, а от преобразователя; частоты ПЧ, показанного на рис. 6-1, энергия к которому подводится от сети постоянной частоты f1c и напряжения U1c На выходе преобразователя, как правило, меняется не только частота f1, но и напряжение U1. Для преобразования частоты могут быть использованы электромашинные или полупроводниковые устройства, различающиеся по принципу действия и конструкции.
 Законы
частотного управления
Законы
частотного управления
-
U/f = const
-
Eвн/f = const
-
C параметрической компенсацией падения сопротивления статора
2. Позиционная САР. Малые и средние перемещения.
В
соответствии с принципами подчиненного
регулирования, объект содержит три
последовательных звена. В соответствии
с этим САР трехконтурная. .
.
Упрощенная структурная схема трехконтурной САР:
Здесь
задатчик интенсивности (ЗИ) ограничивает
 или
или
 на допустимом уровне. Возможны варианты
без ЗИ.
на допустимом уровне. Возможны варианты
без ЗИ.
-
Построение контуров тока и скорости.
-
Контур регулирования тока.
 ;
;




 .
.
-
Контур регулирования скорости.
 П регулятор
(пропорциональный).
П регулятор
(пропорциональный).
При
наличии нагрузки, имеется статическая
ошибка
 ,
которая определяет статическую ошибку
положения или перемещения. Если
,
которая определяет статическую ошибку
положения или перемещения. Если
 , то используют пропорционально-интегральный
(ПИ) регулятор скорости (или
пропорционально-дифференциальный).
, то используют пропорционально-интегральный
(ПИ) регулятор скорости (или
пропорционально-дифференциальный).
 ;
;

 ;
;
-
Построение контура регулирования положения.
Основные требования САР положения: максимальное быстродействие, отсутствие перерегулирования в положениях. Эти требования для всех возможных режимов работы, при использовании линейного пропорционального регулятора положения могут не выполняться.
 если все
если все
 линейны.
линейны.
Различают следующие режимы работы позиционных САР:
-
Режим малых перемещений. В нем система линейна, то есть не проявляется ни одно из ограничений.
-
Режим средних перемещений. В этом случае ЗИ ограничивает
 на допустимом уровне
на допустимом уровне
 .
.
Если
нет ЗИ, то осуществляется работа под
отсечку, то есть ограничен допустимый
ток. При работе с ЗИ так же возможна
работа под отсечку. Скорость не доходит
до

-
Режим больших перемещений. Скорость доходит до
 ,
то есть
,
то есть
 ,
которую определяет блок ограничения.
Здесь проявляются и другие ограничения
,
которую определяет блок ограничения.
Здесь проявляются и другие ограничения
 и тока.
и тока.
Режим средних перемещений:
Для качественной отработки средних перемещений необходимо, чтобы торможение происходило с постоянным ускорением.
Если
рассматривать торможение, то для любого
момента торможения с заданными начальными
условиями можно записать:

Средние перемещения: Угловые перемещения:





Режим малых перемещений:
Система разомкнута, ЗИ — в режиме слежения
С П-РС
 ,
,
 — токовый контур.
— токовый контур.


Основным из требований САР – отсутствие перерегулирования по положению.
Поэтому передаточная функция РП
 ,
при этом
,
при этом

 ,
с ПИ-РС
,
с ПИ-РС

3. Факторы, влияющие на точности остановки лифтов и подъёмников. Схемы точного останова.
-
Загруженность агрегата
-
Тормозной момент привода
-
Исходная скорость
-
Разброс времени срабатывания релейно-контакторной аппаратуры.
Повысить точность остановки можно двумя способами:
Введением режима пониженной скорости при подходе заданной точке
Введением дополнительного контура регулирования положения.
-
Точность останова, ошибка определяется:
 ,
где
,
где
V0 – начальная скорость торможения
F0 – тормозное усилие, развиваемое ЭП
m0 – средняя масса движущихся частей
t0 – среднее время срабатывания аппаратуры, приводящей ЭП в режим торможения.
∆ – отклонение соответствующих величин.
Наибольше влияет на отклонение точности остановки начальная скорость (ее необходимо снизить) => во всех лифтах и подъемниках есть узлы понижения скорости, при приближении кабины к заданной этажной площадке.
Повышение требований к точности остановки подъемно-транспортных механизмов, с одной стороны, и совершенствование техники управления электроприводами - с другой, привели к широкому использованию при цикловой автоматизации систем автоматического регулирования положения рабочего органа механизма по отклонению от уровня точной остановки. При этом процесс точной остановки протекает в два этапа: на первом этапе происходит замедление электропривода от рабочей скорости до пониженной, а на втором этапе рабочий орган механизма входит в зону автоматического контроля положения и система регулирования устанавливает его в заданную позицию с требуемой точностью. Если разгрузочно-погрузочные операции производятся без наложения механического тормоза, электропривод под действием системы регулирования положения непрерывно компенсирует возмущения, обусловленные упругостью подъемного каната, и удерживает рабочий орган в зоне остановки с требуемой точностью. Устройства для автоматического выравнивания, воздействующие на привод подъемной лебедки или механизма передвижения, в настоящее время используются для повышения точности остановки и в тех случаях, когда после выравнивания должен накладываться механический тормоз.
Схема расстановки датчиков контроля положения приведена на рис. 4-4, а. Индуктивные датчики точной остановки ДТВ и ДТН. расположенные на кабине подъемника, у уровня точной остановки замы каются скобой ЗС. При этом сигналы на выходе ДТВ и ДТН имеют наименьшее значение и равны друг другу. При опускании кабины вниз на расстояние l магнитопровод датчика ДТВ размыкается и на его вы ходе сигнал максимален. При подъеме на расстояние l соответственно максимален сигнал на выходе датчика ДТН.
Датчики ДТВ и ДТН могут быть использованы для управления релейной системой контроля положения либо включены в непрерывную дифференциальную схему контроля положения, дающую зависящий от положения кабины сигнал uк.п=f(∆S), воздействующий на систему автоматического регулирования положения по отклонению от уровня точной остановки.
В релейной системе (рис. 4-4. 6) на выход датчиков ДТВ и ДТН подключаются реле РТВ и РТН, которые в режиме выравнивания непосредственно управляют реверсивными контакторами KB и КН. Если кабина находится ниже уровня этажа, то включен контактор В и осуществляется подъем кабины со скоростью vп до точки, в которой напряжение на выходе датчика ДТВ, уменьшаясь, станет равным напряжению отпадания реле РТВ. Реле РТB отпадает и отключает контактор KB, накладывается механический тормоз.
В процессе торможение кабина может достигнуть точки выше уровня этажа, в которой напряжение на выходе датчика ДТН, увеличиваясь, становится равным напряжению срабатывания реле РТН. Реле

РТН (РТВ), и процесс выравнивания закончится. Очевидно, расстояние между точками срабатывания реле РТВ и РТН 2lср должно быть связано с допустимой неточностью остановки соотношением 2lср=2∆Sдоп.
Таким образом, процесс выравнивания сопровождается затухающими колебаниями, а при определенных условиях за счет влияния времени срабатывания аппаратуры может быть и неустойчивым. Более детальный анализ рассматриваемою процесса показывает, что удовлетворительное затухание колебаний обеспечивается выбором такой средней начальной скорости vп0, при которой за время торможения скорость успевает снизиться до конечной скорости vп.к=(0,2 - 0,3)vп0. При этом с некоторым приближением можно записать:
vп0t0
+ 0,91
Решая полученное уравнение относительно скорости, получаем:

Сравнивая (4-7) и (4-9). можно заключить, что при применении рас смотренной релейной системы регулирования положения требуемый диапазон регулирования скорости остается примерно тем же, что и в разомкнутой системе.
Вариант схемы, позволяющей получить на выходе непрерывный сигнал uк.п=f(∆S), представлен на рис. 4-5, а. Здесь напряжение uк.п= ud1-ud2, где ud1 и ud2 напряжения на выходе выпрямителей B1 и В2, соответственно зависящие от индуктивного сопротивления датчиков ДТВ и ДТН Характеристики схемы приведены на рис. 4-5. б.
В системе непрерывного действия теоретически можно получить любую требуемую точность остановки. Если обозначить статический коэффициент усиления системы выравнивания -kв.ст = М/uк.п, а максимальный сигнал на выходе схемы контроля положения Uк.п. max, то можно установить взаимосвязь между допустимой неточностью

остановки и коэффициентом усиления kв.ст при заданной ширине зоны 2l, в пределах которой uк.п изменяется от + Uк.п. max до - Uк.п. max (см. рис. 4-5, б). полагая∆Sдоп.<l:
kв.ст = Мст.maxl/Uк.п. max∆Sдоп.
В процессе выравнивания динамический момент электропривода непрерывно изменяется, то возрастая от нуля до наибольшего значения, то вновь уменьшаясь до нуля. Если принять среднее ускорение при замедлении и разгоне а зоне выравнивания равным (0,2 — 0,3)адоп. то из условия ограничения колебаний можно получить ориентировочное соотношение для определения требуемой средней остановочной скорости

Например, если для скоростного лифта vp = 3,5 м/с, l=0,02 м. адоп.=2 м/с2, то требуемая остановочная скорость должна выбираться из условия vп.0 < 0,18 — 0,2 м/с. При проектировании таких лифтов обычно принимают vп.0 = 0,15 - 0,2 м/с.
При использовании типовой трехконтурной структуры позиционно го электропривода, рассматриваемой в § 4-5, требуемая остановочная скорость может быть значительно повышена за счет применения регулятора положения с параболической характеристикой [4].